Изобретение относится к вычислитель ной технике, а конкретно к электронным устройствам для моделирования диффузион ных процессов и решения уравнений в частных производных, и может быть применено при исследовании тепловых, диффузионных, электрических, оптических и других процессов. Известно устройство, содержащее источники белого шума, преобразователи напряжения в частоту импульсов, реверсивные счетчики-делители с управляемым коэффициентом деления, счетчики координатной выборки, запоминающий блок и блок управления и обработки, моделирующее непрерывный диффузионный процесс Ц Недостатком данного устройства является невозможность точного моделировани самого процесса рассеяния диффундирующей частицы, например, с учетом его не- изотропности и случайного характера длины свободного пробега. Наиболее близким к изобретению по техническому решению является устройств моделирующее диффузионные процессы, представляющие последовательность шагов, длина каждого из которых соответствует заданному коэффициенту диффузии, а направление является случайной величиной, равновероятно выбираемой из фиксированного множества направлений, содержащее блок памяти, буферный регистр, вычитающий счетчик, генератор тактовых импульсов, суммирующий счетчик, генератор случайных нисел и интеграторы 2}. Однако это устройство не позволяет моделировать процессы диффузии с неизот.ропным рассеянием частиц и свободным пробегом случайной длины. Цель изобретения - повышение точнооти решения задач. Поставленная цель достигается тем, что в устройство для моделирования диффузионных процессов, содержащее блок определения скорости, выходы которого соединены соответственно с информационными входами трех интеграторов, выходы которых соответственно соединены с коор39458734
дииатными входами блока фиксирования ре-рого соединен с общей шиной, а выход
.зультатов, связанными соответственно сявляется выходом блока, первый вход
входами блока задания граничных условий,функционального преобразователя двух
и блок задания начальных условий, триперемен{1ых и второй информационный вход
выхода которого соответственно соединены 5первого переключателя являются соответ- с управляющими входами интеграторов, дополн тельно введены управляемый генератор пуассоновских сигналов, блок вычисления модуля скорости и два блока
форк-гарования угпов рассеяния, причем опервого переключателя, являются соответвыходы интеграторов соответственно сое- ственно управляющими входами блока, а динены с тремя управляющими входами генератора пуассоновских сигналов, выход которого соединен с первым управляющим входом блока вычисления модуля скорости и входами блоков формирования углов рассеяния, выходы которых соответ- ственно соединены с первым и вторым информационными входами блока определения составляющих скорости, третий информационный вход которого подключен к выходу блока вычисления модуля скорости соединённому с четвертым управляющим входом генератора пуассоновых сигналов и с интегрАтьным входом блока фиксирования результатов, а первый выход блока задания граничных условий соединен с входом блока задания начальных условий, четвертый выход которого соединен с вторым информационным входом блока вычисления, модуля скорости, второй управляклций вход которого подключен к второму выходу блока задания граничных условий, третий выход которого соединен с управляющим входом блока определения соо тавляющ-их скорости, блок формирования угла рассеяния содержит генераторы белого шума, ключи, триггеры, дешифратор, и функциональный преобразователь, причем вы ходы генератора белого шума через ключи соответственно соединены с входами триггеров, выходы которых соответственно подключены к входам дешифратора, выход которого соединен с входом функционального преобразователя, выход которого является выходом блока, а объединенные управляющие входы ключей являются, входdM блока, блок вычисления модуля скорости содержит функциональный преобразователь двух переменных, узел памяти, триггер и два переключателя, причем выход функционального преобразователя двух переменных соединен с первым информационным входом первого переключателя, выход которого соединен с ингЬормационным входом узла памяти, выход которого соединен с первым информационным входом второго переключателя, второй информационный вход кото-
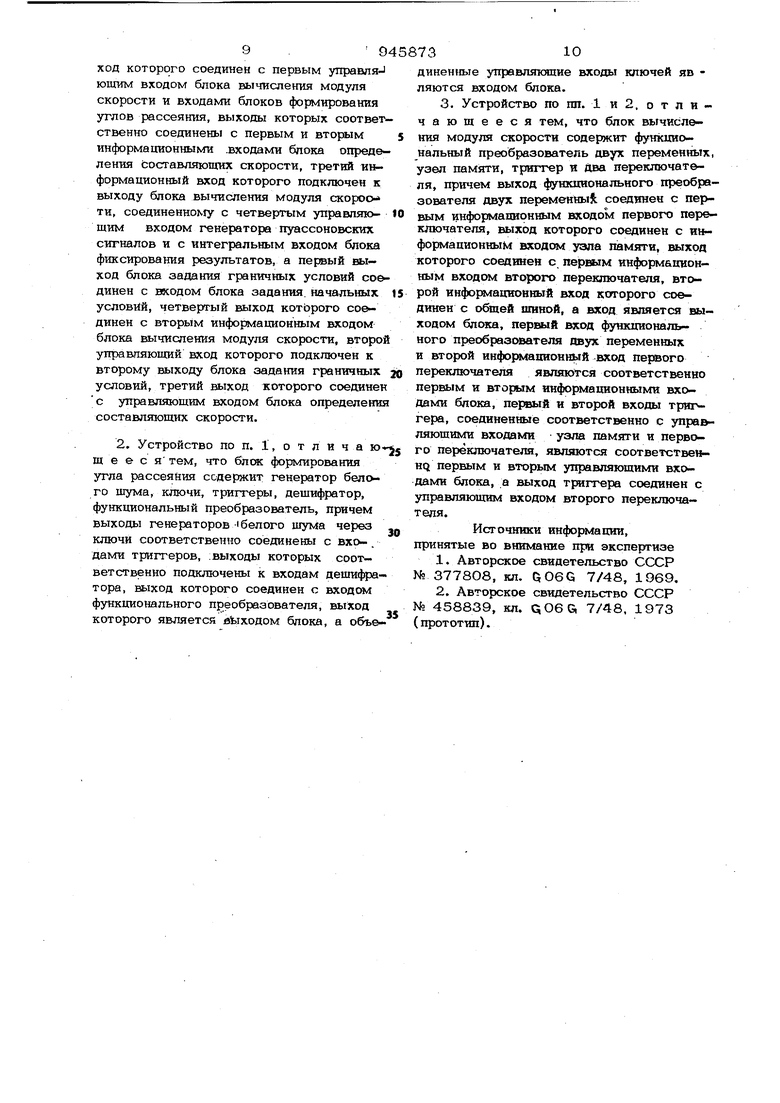
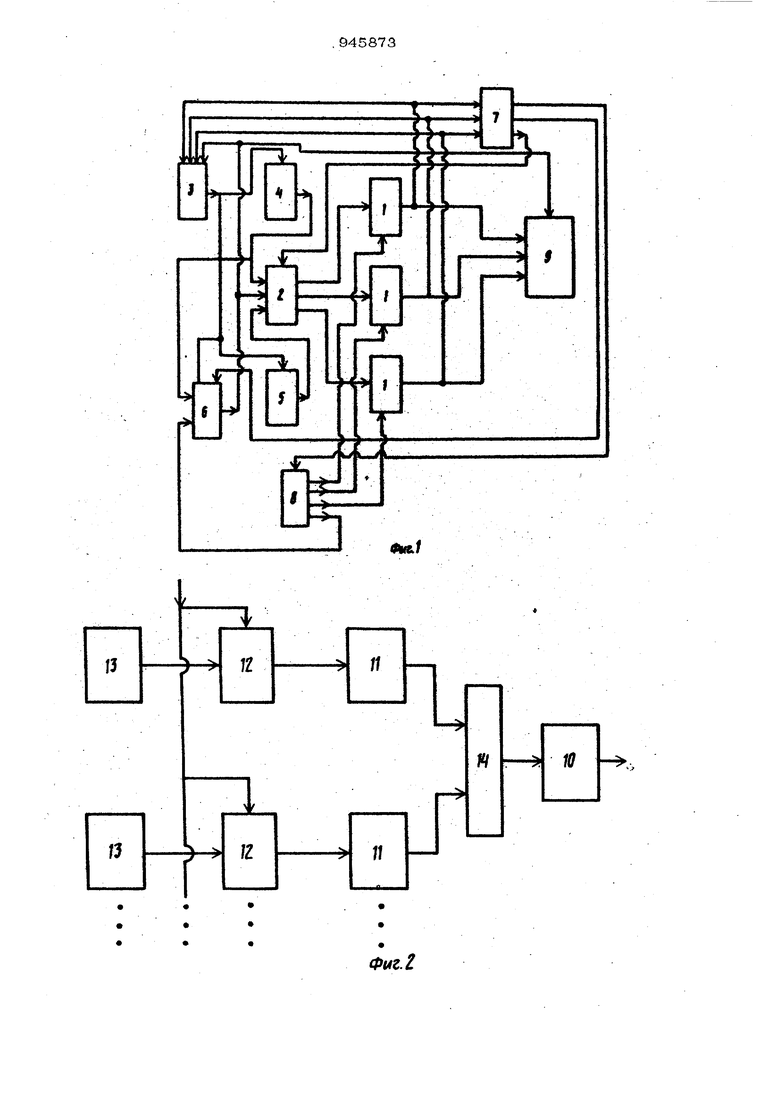
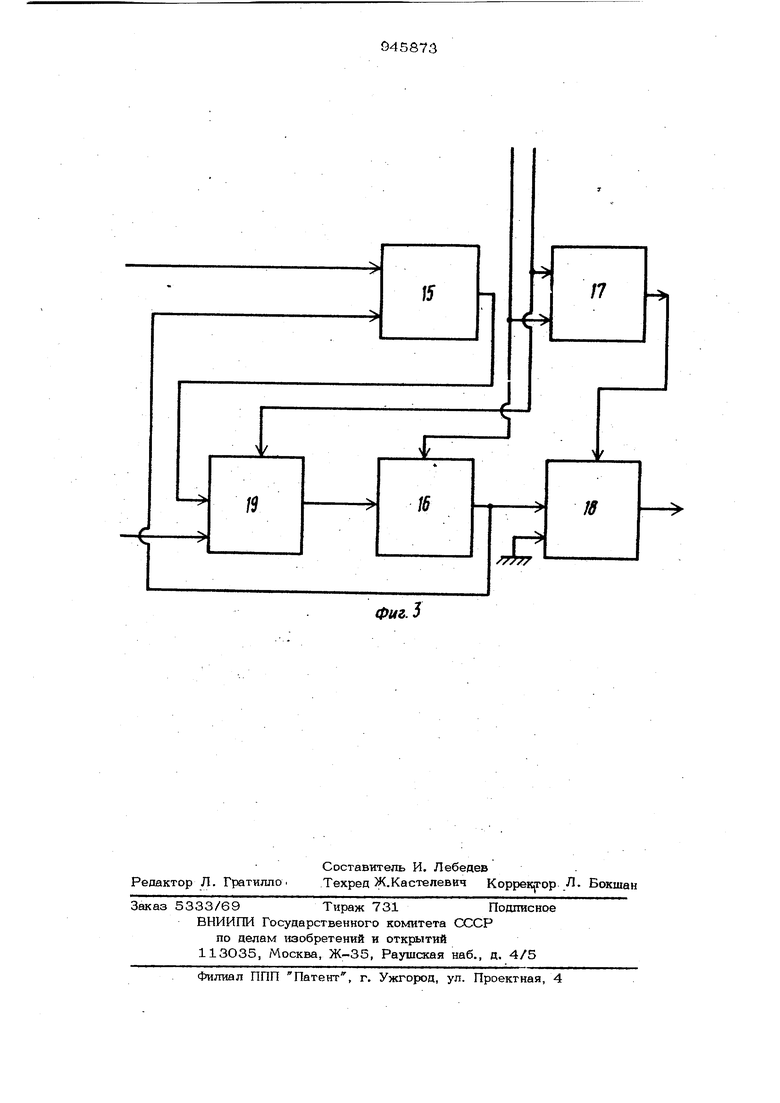
ственно первым и вторым информационным входами блока, первый и второй входы триггера, соединенные соответственно с управляющими входами узла памяти и выход триггера соединен с управляющим входом второго переключателя. На фиг. 1 представлена блок-схема устройства; на фиг, 2 - схема блока формирования угла рассеяния; на фиг. 3 - схема блока вычисления модуля скорости, Устройство содержит интеграторы 1, блок 2 определения составляющих скороо и, управляемый генератор 3 .пупссоновс ктос сигналов, блоки 4 и 5 формирования углов рассеяния, блок 6 вычисления моДУЛЯ скорости, блок 7 задания граничных условий, блок 8 задания начальных условий, блок 9 фиксирования результатов, Каждый блок 4 и 5 формирования угла рассеяния содержит функциональный преобразователь Ю, триггеры 11, ключи 12, генераторы 13 белого шума, дещифратор Блок 6 вычисления модуля скорости содержит функциональный преобразователь 15 двух переменных, узел 1 б памяти, триггер 17 и два переключателя 18 и 19. Управляемый генератор 3 пуассоновских сигналов может представлять собой набор счетчиков радиоактивных частиц, средние частоты которых относятся как 1:2:4..., Управление таким датчиком осуществляют с помощью автоматического подключения счетчиков к общему входу в разных комбинациях. Формирователи углов рассеяния 0 4 и Ч 5 предназначены для моделирования рассеяния на случайный УГОЛ блуждающей частицы на атомах среды, В большинстве случаев вероятность такого рассеяния аксиально симметрична относительно направления движения до столкновения. Такое рассея{Ше может быть полностью описано заданием вероятности отклонения частишз на угол вот первоначального направления движения при равновероятном направлении, характеризуемом углом (( проекции вектора новой скорости на плоскость, перпендикулярную к прежнему направленшо движения Формирователи угла б 4 и угла 5 могут состоять из набора триггеров, срабатывающих от источника шума, выходы которых через дешифраторы соединены с входами функциональных преобразователей. Получаемый таким образом код набора триггеров соответствует дискретной случайной, равномерно распред ленной на отрезке О+(), величине, где У1 - количество триггеров, а после дешифратора будем иметь случайные напря жения О t равномерно распределенные на отрезке OQ - а . где и U выбирают ся в соответствии с задачей. Если плот ность вероятности получения угла 0 есть Р (0) , то функциональный преобразо ватель должен, имея на входе такое случайное напряжение U,, вырабатывать напря жение, соответствующее условию R((07dl6 1- (3U(Uc 0 в этом случае), т. е. меяеду в и U должна быть установлена такая функциональная зависимость, чтобы заданная вероятность попадания угла 9 в интервал в- при каждом рассеяНИИ равнялась вероятности получения в модели напряжения U в интервале и. - и -f -Из этого условия слеIIдует -±Лр(о1),(0-0), О Р (0-0) - вероятность углу в имет значение в интервале в-в . Обозначая Р(0-9(е ), получим ( | где - фушсция, обратная f . Она известна заранее и может быть выбрана на фушогаональном преобразователе. Например, если рассеяние изотропно в сиотеме центра масс (в лабораторной сист&ме координат оно все равно анизотропно), то )i-AlCos9), поскольку su а . i П . Значит QI.arccos И-1у-Ь Аналогично ., №s выходной сигнал другого датчика случайных чисел. Блок вычисления модуля скорости 6 включает функциональный преобразователь 15, который должен вырабатывать фуикцию двух переменных Q и V , где V модуль скорости частицы до столкнове- ния. Например, при моделировании стол новений частицы массой тп с неподвижнь ми атомами среды массой М эта функдия имеет вид -V /м -т 1Мтсо9в V () .Следовательно, в этом случае он должен воспроизводить функцию 1 :П Шп1С05в1 (М + ГТ) и умножать ее выходной сигнал с узла памяти 16, входящей в блок вычисления модуля скорости 6 и содержащей значение V . Устройство работает следующим образом. Интеграторы 1 моделируют ломаную траекторию движущейся частицы, интегрируя выходные сигналы блока 2 определения составляющих скорости, которые меняются через случайные промежутки вр мени по вероятностным законам, соотве-пствующим механизму рассеяния частицы. Промежутки времени интегрирования, определяющие длины свободного пробега между двумя рассеяниями, вырабатывают ся управляемым генератором 3 пуассоновских сигналов, параметркоторого меняется соответственно коэффициенту диффузии, зависящему в общем случае от координат и скорости частиц. При срабатывании генератора 3 пуассоновскиХ сигналов формирователь 4 угла в вырабатывает величину угла отклонения © тра- ектории частицы от ггредыдущего напрев ления движения, а формирователь 5 угла выдает направление этого отклонения I/ в плоскости, перпендикулярной прежн му направлению движения. По этому же сигналу генератора 3 пуассоновских сиг налов блок 6 вычисления модуля скорости выдает на выходе нулевой сигнал для прерывания работы интеграторов 1 и.фикс@1торов 10 потока на время блокирования, необходимое для выработки нового напра ления движения. После появления на входе величины угла отклонения блсж 6 вычитания скорости вырабатывает и запоминает соответствующее ему новое значение моду ля скорости V, моделируя потерю энергии частицей при рассеянии. В то же время блок 2 определения составляющих скорос-ти формирует и запоминает сигналы, соответствующие косинусам углов между 7 осями координат и новым направлен движения COS (V 2) cose COS 0- Sin в sin 9COS , COS(V, X)r5in вСОЭЧсСЗвЧ +cos6 cosM sine003 f-Sin If s-fn 0sin cosi),)5.tYiesivi4 cose+ 40059 sin 4 sin eCOS fcos loginssin , где Q-vi - углы предыдущего нап ления движения. Затем этот блок вырабатывает и минает значения тригонометрических ций углов нового направления движе (V, l) leCOS(V,Z) COS 4 t coe(v,x)co5(V,y) По истечешш времени блокировки по редному сигналу генератора 3 пуасс ких сигналов блок 6 вычисления мод скорости выдает на выходе значения дуля скорости V , а блок 2 определ составляющих скорости, умножая его соответствующие функции, вырабатыв составляющие скорости (V,)-, (v,x)., V (). Блок 7 граничных условий вырабатывает функцию Zpp.Z(X,: и сравнивает ее с 2 , где X ,, Z - текущие координаты дифференцирующей частицы. При 2- гр соответствует выходу частицы на границу, блок 7 граничных условий выдает сигнал прерывания интегрирования на блок 6 вычисления скороети и при рещении краевой задачи вырабатывает случайное число из равномерно распределенной на фиксированном отрезке последовательности, в соответствии с значением которого или подает сигнал ин версии скорости на блок 2 определения составляющих скорости, по которому последний меняет знаки у всех составляющих после чего возобновляется интегрирование 73 что соответствует отражению частицы от границы, или заставляет срабатывать блок 8 начальных условий, задающий координаты появлетгая новой частицы по случайному закону, соответствующему распределению источников. В последнем случае блок 2 гпределения составляющих скорости определяет величины составляющих по новым значениям углов Q и Ч , далее интегр фование осуществляется обычным образом. При моделировании диффузии отражение от границы не раосматривается. Для фиксирования результатов моделирования определяется поток диффундирующих частиц, равный суммарному пути всех частиц в единице объема в единицу, времени в окрестностях точки, где определяется решение. Таким образом, выполнение устройства в соответствии с изобретением позволяет моделировать диффузионный процесс с учетом случайной длины пробега диффундирующей частицы, поскольку последнюю определяет время между двумя последующими импульсами управляемого генератора пуассоновских с;1гналов, а также с учетом неизотропности рассеяния путем задания соответствующего закона вьфаботки случайных значений углов G и Ч в функциональные преобразователи, содержащиеся в.датчиках углов. Это позволяет более точно рещать задачи по исследованию диффузии нейтронов в реальных средах. Формула изобрете Устройство для моделирования диффузионных процессов, содержащее блок определения составляющих скорости, выходы которого соединены соответственно с информационными входами трех интеграторов, выхода которых соединены с координатными входами блока фиксирования результатов, связанными соответственно с входами блока задания граничных услов:ий и блока задания начальных условий, три- выхода которого соответственно со&динены с управляющими входами интеграторов, отличающееся тем, что, с целью повышения точности, в него дополнительно введены управляющий генератор пуассоновских сигналов, блок вычисления модуля скорости и два блока формирования углов рассеяния, причем выходы интеграторов соответственно соединены с тремя управляющими входами генератора пуассоновских сигналов, выход которого соединен с первым управпя-J ющим входом блока вычисления модуля скорости и входами блоков формирования углов рассеяния, выходы которых соответ ственно соединены с первым и вторым информационными .входами блока определения составляющих скорости, третий инфop anиoнный вход которого подключен к выходу блока вычисления модуля скорости, соединенному с четвертым управляк щим входом генератора пуассоновских сигналов и с интегральным входом блока фиксирования результатов, а первый выход блока задания граничных условий сое динен с вкодом блока задания, начгшьных условий, четвертый выход котЬрого соединен с вторым информационным входом блока вычисления модуля скорости, второ управляюпшй вход которого подключен к второму выходу блока задания граничных условий, третий выход которого соединен с управл5пощим входом блока определетш составляющих скорости. 2, Устройство по п. 1, о т л и ч а ю щ е е с я тем, что блек формирования угла рассеяния содержит генератор шума, ключи, триггеры, дешифратор, функциональный преобразователь, причем выходы генераторов белого шума через ключи соответственно соединены с , дами триггеров, : выходы которых соответственно подключены к входам дешифратора, выход которого соединен с входом функционального преобразователя, выход которого является выходом блока, а объединенные управл5пошие ысоды ключей яв ляются входом блока. 3. Устройство по пп. 1 и 2, о т л и чающееся тем, что блок вычисления модуля скорости содержит функциональный преобразователь двух переменных, узел памяти, триггер И два переключателя, причем выход фушшионального преобразователя двух переменный соединен с первым информационным входом первого переключателя, выход которого соединен с информационным входом узла памяти, выход которого соединен с первым информационным входом второго переключателя, второй кнфо{ 1ационньтй вход которого соединен с общей шиной, а вход является выходом блока, пер1№1й вход функционального преобразователя двух переменных и второй информационный вход первого переключателя являются соответственно первым и вторым информационными входами блока, первый и второй входы триг гера, соединенные соответственно с упра&ляющими входами узла памяти и первого переключателя, являются соответстве HQ первым и вторым управляющими входами блока, а выход триггера соединен с управляющим входом второго переключателя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 377808, кл. tJOSG 7/48, 1969. 2.Авторское свидетельство СССР № 458839, кл. QO6Gi 7/48. 1973 {прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Генератор пуассоновского потока | 1983 |
|
SU1140236A1 |
| Вероятностное вычислительное устройство для решения трехмерных краевых задач | 1978 |
|
SU767785A1 |
| ГЕНЕРАТОР СЛУЧАЙНОГО ПРОЦЕССА | 1991 |
|
RU2050585C1 |
| Генератор пуассоновского потока импульсов | 1989 |
|
SU1667229A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ | 1993 |
|
RU2074372C1 |
| Устройство для моделирования потока импульсных помех | 1982 |
|
SU1037287A1 |
| Устройство для вычисления спектра сигналов | 1986 |
|
SU1383392A1 |
| Устройство для моделирования потока импульсных помех | 1983 |
|
SU1080158A1 |
| Вероятностное устройство для решения уравнения Лапласа | 1983 |
|
SU1091172A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ ТОЧЕК АКУПУНКТУРЫ | 1992 |
|
RU2027403C1 |
Г
3
к
Фиг-Е
/
/7
15-ё
/
J8
7777
Фаг.З
