1
Изобретение относится к сельскохозяйственным машинам, а именно, к устройствам для сбора плодов.
Известно приспособление для съема плодов, включающее режущий аппарат, штангу, пневмопроводу и плодосборник 1j.
Недостатками инструмента являются сложность наведения режущего аппарата на плодоножку, повреждение плодов,о режущим аппаратом и невозможность собирать плоды с высоких деревьев.
Наиболее близким к изобрерению техническим решением является приспособление для съема плодов с дере- t5 вьев, включающее штангу, смонтированные нэ ней подвижный гребенчатый . нож, гребенчатый противорежущий нож, гибкую тягу для перемещения ножа, и пружину его возврата 2J. 20
Недостатком данного устройства является низкая производительность: трос, натянутый параллельно штанге,
затрудняет внедрение приспособления в крону дерева, плодоножки срезанных плодов получаются различной длины, кроме того, невозможно собирать плоды с деревьев различной высоты.
Цель изобретения - повышение производительности труда.
Это достигается тем. что подвижный и противорежущий ножи шарнирно связаны между собой, причем штанга имеет фигурный паз, а противорежущий нож - палец, который расположен в пазу, кроме того, штанга выполнена телескопической и снабжена катушкой для гибкой тяги.
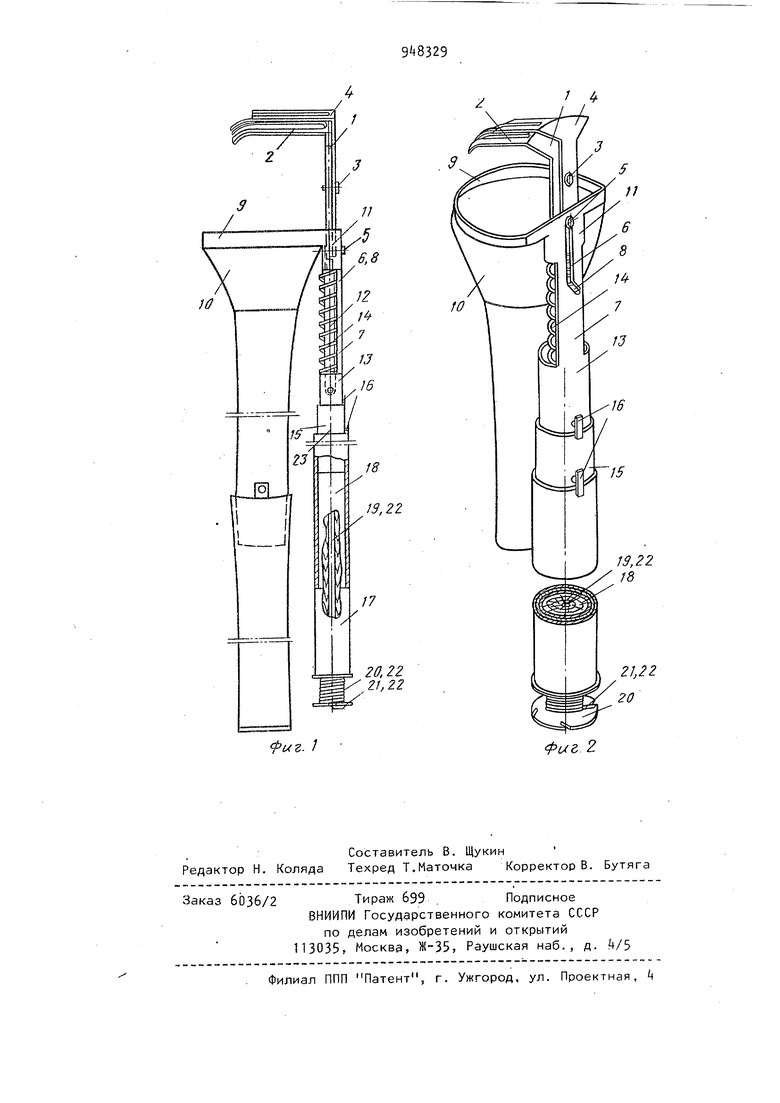
На фиг. 1 изображен плодосъемник, вид сбоку; на фиг. 2 - то же, в аксонометрической проекции.
Плодосъемник состоит из режущего устройства, в которое входит гребенчатый нож 1 , имеющий в верхней части горизонтально расположенные пальцы 2. Концы-пальцев 2 подогнуты вниз для лучшего удерживания плода. Пальцы 2 расположены по окружности. В центре окружности на гребенчатом ноже 1 крепится ось 3- На оси 3 крепит ся подвижной гребенчатый нож , паль цы которого находятся сверху пальцев гребенчатого ножа и плотно прилегают к ним. Пальцы подвижного гребенча того ножа с левой стороны имеют лезвия, а .пальцы гребенчатого ножа 1 играютроль противорежущих пластин. На нижнем конце подвижный гребенчатый нож А имеет палец 5, который помещается в пазу 6 корпуса 7 плодосъемника. Паз б-в нижней части имеет изгиб 8. При помощи оси 3, пальца 5 и паза б с изгибом 8 осуществляется возвратно-поступательное и радиальное движение рабочих органов захватно-режущего устройства. В верхней части к корпусу 7 крепится кольцо 9, которое удерживает секционный эластичный рукав Ю.Верх няя часть рукава, присоединяющаяся к кольцу 9, имеет приемную емкость рукава. Рукав .состоит из отдельных сек ций. Ниже кольца 9 корпус 7 имеет продолговатый хомут 11, в котором перемещаются подвижный гребенчатый нож 4 и гребенчатый нож 1. Гребенчатый нож 1 вниз оканчивается подпружиненным стержнем 12, который нижним концом входит во втулку 13 корпу са 7. На стержень 12 надета пружина 14, которая поддерживает ножи 1 и k в верхнем положении. Для этого пружина 1 верхним концом упирается в гребенчатый нож 1. Пружина нижним концом закреплена во втулке 13. Втул ка 13 входит во втулку 15 большего диаметра, и они образуют телескопическую штангу. При выдвинутом положении втулок телескопической штанги они фиксируются пружинными защелками 16. Внизу телескопическая штанга оканчивается рукояткой управления 17 которая вверху имеет стержень 18. Стержень свободно входит во втулку 15 телескопической штанги. Рукоятка по оси имеет канал 19- Внизу рукоятка оканчивается катушкой 20 с нижним бортиком, имеющим пазы 21 . Пазы 21 служат для фиксирования определенной длины гибкой тяги ручного привода 22 Одним концом гибкая тяга ручного при вода намотана на катушку 20. Гибкая тяга 23 ручного привода проходит через паз 21, в канале 19, во втулке 13 и присоединяется к подпружиненному стержню 12. Работает плодосъемник следующим образом. В зависимости от высоты дерева устанавливается длина телескопической штанги и длина секционного эластичного рукава 10. Вначале подбирается такая длина, которая позволит удобно собирать плоды с нижних ветвей дерева. После этого длина штанги и рукава 10 все время увеличивается для сбора плодов, расположенных выше. Для удаления телескопической штанги достаточно, выдвинуть втулку штанги. и зафикс ировать ее защелкой 16. Перед удлинением штанги сначала удлиняется гибкая тяга 23 ручного привода 22. Тяга 23 удлиняется следующим образом. Нижний конец тяги 23 выводится из паза 21 катушки 20 и разматывается с катушки. После того как определена длина штанги, тягу 23 подгоняют под эту длину и фиксируют в прорези. Для удлинения рукава 10 надо следующую секцию надеть на последнюю и закрепить. Режущее устройство заводится над плодом. Плодоножка входит между пальцами гребенчатых ножей 1 и . После этого за рукоятку управления 17 гибкая тяга 23 ручного управления 22 перемещается вниз. Тяга 23 тянет за собой подпружиненный стержень 12, который сжимает пружину 1. Режущее устройство приближается к кольцу 9. Плод входит в приемную емкость рукава 10. Палец 5 первоначально перемещается в вертикальной части паза 6. После, того как плод окажется в приемной полости рукава 10, палец 5 попадает в изгиб 8 прорези и начинает двигаться вниз и вправо. Тем самым подвижный гребенчатый нож на оси 3 начинает поворачиваться против часовой стрелки и пальцы его перемещаются влево; Пальцы гребенчатого ножа, передвигаясь, своими лезвиями прижимают плодоножку к пальцам подвижного гребенчатого ножа и перерезают ее. Плод по рукаву 10 попадает в тару. После этого освобождается рукоятка 1 7 и режущее устройство под воздействием пружины It возвращается в верхнее положение. При этом палец 5, двигаясь в обратном направлении в изгибе 8, поворачивает подвижный гребенчатый нож по часовой стрел ке в исходное положение. После этого цикл повторяется.
Применение плодосъемника позволит повысить производительность труда, уменьшить повреждения снимаемых плодов и снимать плоды с деревьев . различной высоты.
Формула изобретения
1. Приспособление для съема пло.дов с деревьев, включающее штангу,, смонтированные на ней подвижный, гре.бенчатый нож, гребенчатый противорежущий нож, гибкую тягу для перемещения последнего и пружину его возвраt83296
та, отличающееся тем, что, с целью повышения производитель ности труда, подвижный и противорежущий ножи шарнирно связаны между 5 собой, причем штанга имеет фигурный паз, а гребенчатый противорежущий нож - палец, который расположен в пазу.
2. Приспособление по п. 1, о т0 личающееся тем, что
штанга выполнена телескопической и снабжена катушкой для гибкой связи.Источники информации, принятые во внимание при экспертизе 15 1. Авторское свидетельство СССР № , кл. А 01 О iie/Zit, 1971.
2. Авторское свидетельство СССР № U977, К.Л. А 01 D , 197.
риг. /
/
5
;/
i/g 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Плодосъемник | 2015 |
|
RU2612364C2 |
| Плодосъемник | 1980 |
|
SU917769A1 |
| Плодосъемник | 1990 |
|
SU1824077A1 |
| Плодосъемник | 1990 |
|
SU1790858A1 |
| Подборщик для ручных работ в полеводстве | 1982 |
|
SU1142029A1 |
| ПЛОДОСЪЕМНИК | 1990 |
|
RU2011329C1 |
| ПЛОДОСЪЕМНИК | 2001 |
|
RU2251247C2 |
| Плодосъемник | 2015 |
|
RU2613459C1 |
| ПЛОДОСЪЕМНИК (ВАРИАНТЫ) | 2008 |
|
RU2378819C1 |
| Плодосъемник | 1990 |
|
SU1794388A1 |