Изобретение относится к области машиностроения и может быть использовано в манипуляторах.
Известен модуль манипулятора, содержащий входное и выходное звенья а также пьезокерамический привод ДЗ. Недостатком известного модуля является малая точность перемещения из за взаимного влияния движений по каждой из координат.
Целью изобретения является повышение точности перемещений.
Это достигается за счет того, что пьезокерамический привод выполнен в виде трех фрикционно сопряженных между собой пьезокерамических колец,причем одно из колец связано со входным звеном, а два других - с выходными звеньями.
Кольца могут быть фрикционно сопряжены между собой торцами, причем среднее кольцо связано, со входным звеном.
Крсиле того, кольцо/ связанное со входным звеном, может быть установлено так, что торцовая его поверхность перпендикулярна торцовым поверхностям двух други колец, которые установлены паргшлельно друг другу.
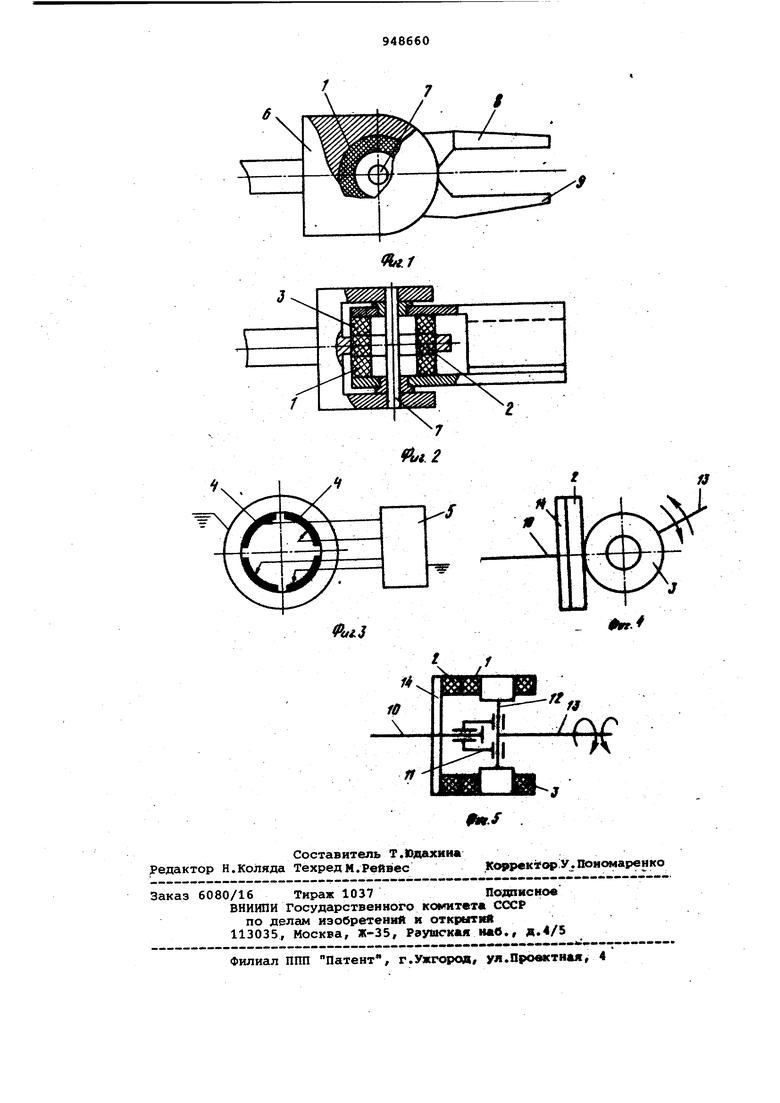
На фиг.1 показано предлагаемое устройство; на фиг.2 - то же, вид сбокуf на фиг.З - схема разделения электродов и подключения пьезоэлементов к м.ногофазному генератору j на фиг.4 показан вариант устройства, вид сбокуJ на фиг.5 - то же, вид сверху.
Модульманипулятора содержит пьезокерамические кольца 1-3. Внутренние электроды 4 пьезокерамических колец разделены на части и подключены к многофазному генератору 5. Внешние электроды подключены к нулевой клемме.
При возбуждении пьезокерамического кольца многофазнь1М электрическим напряжением в нем возбуз1сдается бегущая волна деформации.
Вариант модуля, в котором кольца фрикционно сопряжены торцами и сред20нее кольцо связано с входным звеном, может быть использован преимущественно в захватах.
В этом варианте устройство содержит корпус б, в нем на оси 7 установлены губки 8 и 9, на каждой из которых закреплены пьэзокерамическиё кольца, соответственно 1 и 3. Среднее кольцо 2 по наружной цилиндрической поверхности жестко связано с корпусом б. При возникновении в пьезокерамическом кольце волны деформаций/ на торцовой плоскости в зоне фрикционного контакта с другим пьезокерамическим кольцом создается движущая сила, поворачивающая губки 8 и 9 относительно оси 7. Пьезркерамические кольца 1гЗ сопряжены по боковым поверхностям. При возбуждении колец 1,3 их движение может быть независимым. При возбуждении пьезокерамического кольца 2 на его боковых поверхностях создает1СЯ движущая сила одинакового направления, следовательно обе губки поворачиваются вокруг оси 7 не раскрываясь. Реверсирование движения губокосу ществляется переключением .фазы много фазного генератора 5. Изменяя величину напряжения, подаваемого от многофазного генератора 5, можно изменить амплитуду колебаНИИ пьезокерамических колец, то есть изменить создаваемое усилие зажима. Вариант, изображенный на фиг.4 и 5, преимущественно может быть применен как шарнир манипулятора. В этом случае кольца 1 и 3 устанавливаются так, что торцовые их поверхности параллельны друг другу, а кольцо 2, связанное со входным звено 10, устанавливается так, что его тор цовая поверхность перпендикулярна торцовым поверхностям колец 1 и 3. Входное звено 10 при помощи шарнира 11 и оси 12 связано с выходным звеном 13. На входном звене 10 закреплен дис 14, установленный на нем перпендикулярно. На диске 14 закреплено кольцо 2 с разделенными на секторы электродами/фрикционно сопряжённое с двумя другими кольцами 1,3, установленными по отношению к кольцевому пьезоэлементу 2 перпендикулярно и закрепленными на оси 12. Электроды колец подключены к многофазному генератору вы сокочастотных электрических колебаний. Работает устройство следующим образом. При подключении пьезокерамического кольца 2 к многофазному генератору высокочастотных электрических колебаний в нем возбуждается высокочастотная волна бегущих деформаций, а зона контакта с кол ьцами 1, 3 создается движущая сила/ вращающая кольца вместе с осью 12 выходным звеном 13 и шарниром 11 вокруг оси входного звена 12. При подключении кольцевых пъезо-элементов 1,3, закрепленных на оси 12, к многофазному генератору высокочастотных электрических колебаний, в них возбуждается высокочастотная бегущая в.рлна деформаций, в зоне контакта с кольцевым пьезоэлементом 2 создается движущая сила, вращающая кольцевые пьезоэлементы и ось 12 с выходным звеном 13 в шарнире 11. Реверсирование движения осуществляется изменением направления распространения бегущей волны, т.е. изменением полярности подключения, электродов колец. В предлагаемом устройстве вращение выходного звена 13 вокруг оси 12 и оси входного звена 10 осуществляется раздельно, повышается таким образом точность осу.ществления перемещений по каждой из координат. Формула изобретения 1.Модуль манипулятора, содержащий входное и по крайней мере одно выходное звенья и также пьезокерамический привод, отличающийс я тем, что, с целью повышения точности перемещений, пьезокерамический привод выполнен в виде трех фрикционно сопряженных между собой пьезокерамических колец, причем одно из колец связано с входным звеном, а два других - с выходными. 2.Модуль по п.1, отличающий с я тем, что кольца фрикционно сопряжены между собой торцами, причем среднее кольцо связано с входным звеном. 3.Модуль ПОП.1, отличаю щ и и с я тем, что кольцо, связанное с входным звеном, установлено так; что торцовая его поверхность перпендикулярна торцовым поверхностям двух других колец, которые установлены параллельно друг другу. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 541663, кл. В 25 J 7/00, 1975,
| название | год | авторы | номер документа |
|---|---|---|---|
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Координатный вибропривод | 1979 |
|
SU851563A1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| Волновой вибродвигатель | 1977 |
|
SU621397A1 |
| Вибродвигатель | 1979 |
|
SU817811A1 |
| Вибродвигатель | 1979 |
|
SU845198A1 |
| Вибрационный микротитратор | 1990 |
|
SU1712815A1 |
| Вибродвигатель | 1981 |
|
SU987716A1 |
| Вибродвигатель | 1980 |
|
SU920901A1 |
| Волновой насос | 1989 |
|
SU1707287A1 |