: Изобретение относится к точному приборостроению и может быть использовано в устройствах позиционирования и ориентации, например матриц и шаблонов в техническом оборудовании изготовления полупроводниковых элементов и интегральных микросхем, а также может найти применение в оптико-механических приборах в качестве препаратоводителей или координатных скарующих столов микроскопов. Известно устройство для прецизионного перемещения изделий в плоскос ти по трем координатам, содержащее стол, направляющую и привод в виде электромеханических преобразователей в котором каждый из электромеханичес ких преобразователей установлен под углом и жестко прикреплен одним коицом к координатному столу, причем геометрические оси преобразователей пересекаются в одной точке по вертикали, проходящей через центр тяжести стола 1. Недостатком этого устройства является отсутствие возможности движения объекта по нескольким координатам одновременно, осуществляя сложное движение по заданной програкме. Известен также координатный вибропривод, содержащий основание, закрепленные на нем пьезокерамические преобразователи, подключенные к многофазным источникам высокочастотных электрических колебаний через коммутатор режимов работы. Преобразователи выполнены кольцеобразной формы. Две пары преобразователей жестко закреплены на двух параллельных образующих прямоугольной подвижной рамы и цилиндрическими поверхностями соприкасаются с плоскостью неподвижного основания, две другие пары преобразователей жестко закреплены на неподвижном основании и цилиндрическими поверхностями соприкасаются с упомянутыми образующими раил, еще две пары преобразователей жестко закреплены на других двух параллельных образующих рамы и цилиндрическими поверхностями соприкасаются с плоскостью перемещаемого столика и две пары- кольцеобразных пьезокерамических преобразователей жестко закреплены на упомянутых последних образующих рама и цилиндрическими поверхностями соприкасаются с боковыми поверхностями перемещаемого столика, причем электроды всех преоваэователей разделены на сектора и одключены к многофазному источнику ысокочастотных электрических колеаний 2 .
Недостатками этого устройства явяются сложная конструкция и невозожность осуществления сложного двиения столика по заданной программе,
Цель изобретения - расширение функиональных возможностей, т.е. осуествление движения перемещаемого бъекта по трем координатам с незаисимым управлением и упрощение кон-, струкции.
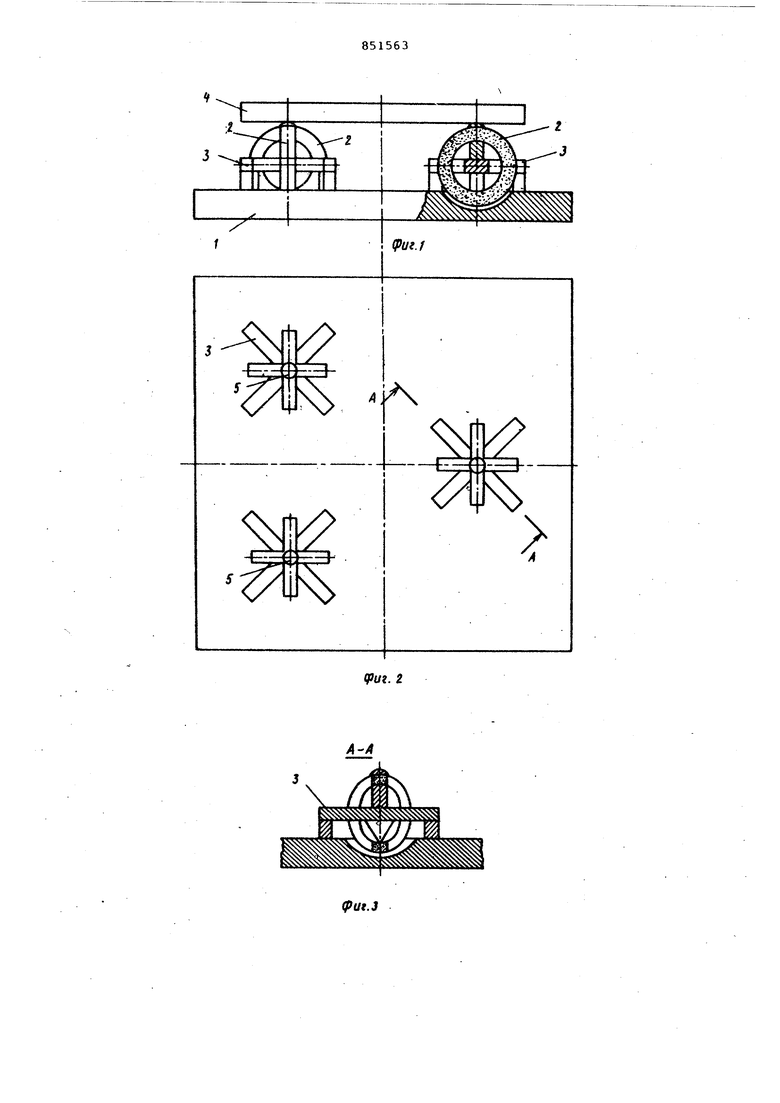
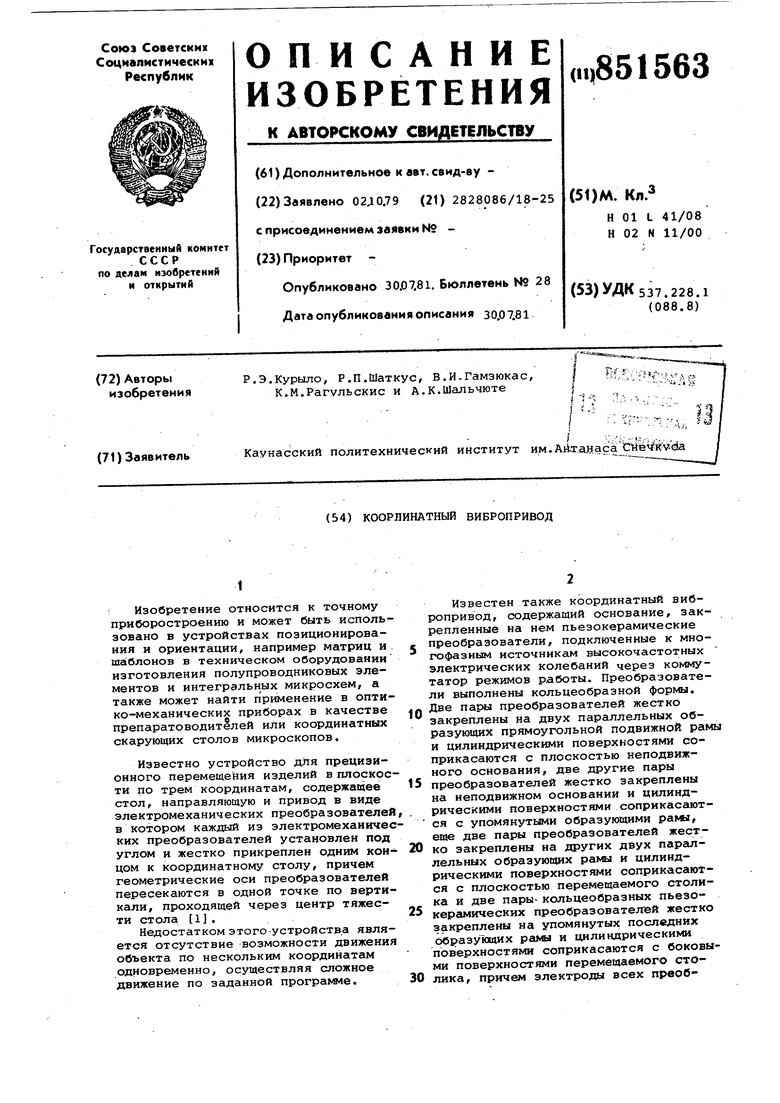
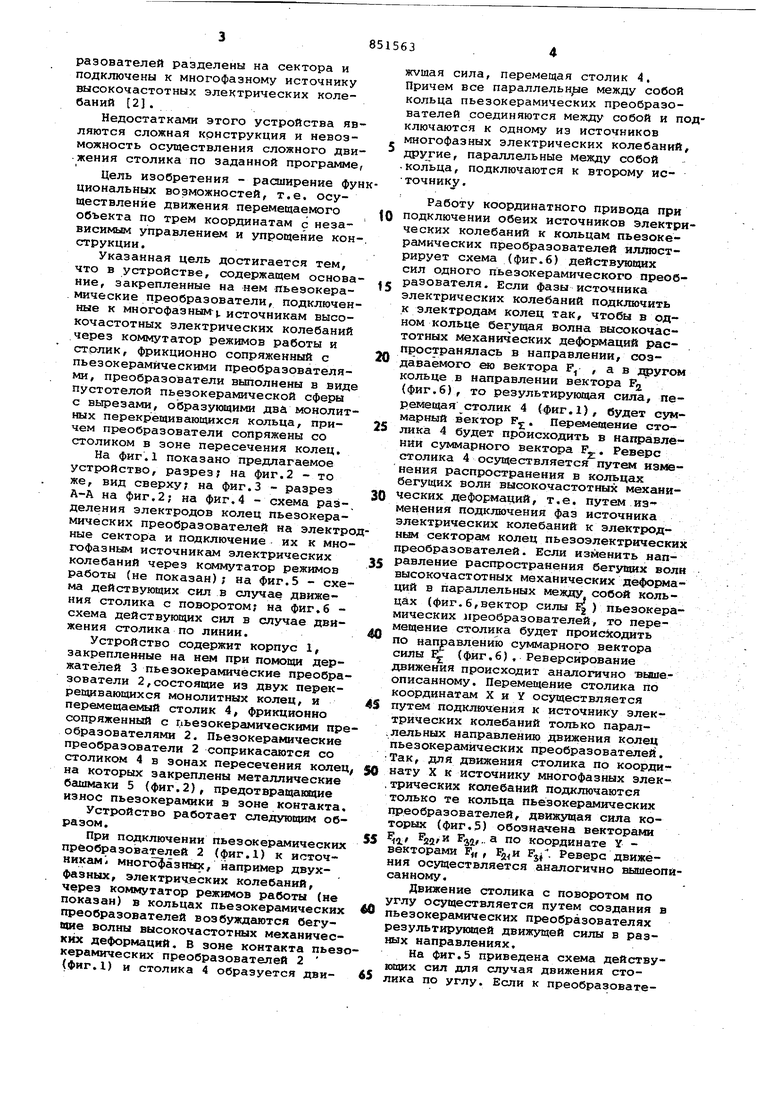
Указанная цель достигается тем, то в устройстве, содержащем основание, закрепленные на нем пьезокерамические преобразователи, подключенные к многофазньп. источникам высокочастотных электрических колебаний через коммутатор режимов работы и столик, фрикционно сопряженный с пьезокерамйческими преобразователями, преобразователи выполнены в виде пустотелой пьезокерамической сферы с вырезами, образующими два монолитных перекрещивающихся кольца, причем преобразователи сопряжены со столиком в зоне пересечения колец. На фиг.1 показано предлагаемое устройство, разрез; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг.2; на фиг.4 - схема раз-, деления электродов колец пьезокерамических преобразователей на электродные сектора и подключение их к многофазным источникам электрических колебаний через коммутатор режимов работы (не показан); на фиг.З - схема действующих сил в случае движения столика с поворотом; на фиг,б схема действующих сил в случае движения столика по линии.
Устройство содержит корпус 1, закрепленные на нем при покющи держателей 3 пьезокерамические преобразователи 2,состоящие из двух перекрепщвающихся монолитных колец, и перемещаемый столик 4, фрикционно сопряженный с пьезокерамйческими преобразователями 2. Пьезокерамические преобразователи 2 соприкасаются со столиком 4 в зонах пересечения колец на которых закреплены металлические башмаки 5 (фиг.2), предотвращающие износ пьезокераьтки в зоне контакта. Устройство работает следующим образом.
При подключении пьезокерамических преобразователей 2 (фиг.1) к источникам многофазных, например двухфазных, электрических колебаний, через коммутатор режимов работы (не показан) в кольцах пьезокерамических преобразователей возбуждаются бегущие волны высокочастотных механических деформаций. В зоне контакта пьезо керамических преобразователей 2 (фиг.1) и столика 4 образуется движушая сила, перемещая столик 4. Причем все параллельн,ые между собой кольца пьезокерамических преобразователей соединяются между собой и поключаются к одному из источников многофазных электрических колебаний, другие, параллельные между собой кольца, подключаются к второму источник.
Работу координатного привода при подключении обеих источников электрических колебаний к кольцам пьезокерамических преобразователей иллюстрирует схема (фиг.6) действ5тащих сил одного пьезокерамического преобразователя. Если фазы источника электрических колебаний подключить к электродам колец так, чтобы в одном кольце бегущая волна высокочастотных механических деформаций распространялась в направлении, создаваемого ек вектора F, , а в другом кольце в направлении вектора Ej (фиг.6), то результирующая сила, перемещая столик 4 (фиг.1), будет суммарный вектор F. Перемещение столика 4 будет происходить в направлении суммарного вектора Fg.. Реверс столика 4 осуществляется путем изменения распространения в кольцах бегущих волн высокочастотных механических деформаций, т.е. путем из- менения подключения фаз источника электрических колебаний к электродHfc i секторам колец пьезоэлектрически преобразователей. Если изменить направление распространения бегущих вол высокочастотных механических деформаций в параллельных между собой кольцах (фиг.6,вектор силы Щ, ) пьезокерамических преобразователей, то перемещение столика будет происходить по нап1равлению суммарного вектора силы F (фиг.6) , Реверсирование движения происходит аналогично вышеописанному. Перемещение столика по координатам X и У осуществляется путем подключения к источнику электрических колебаний только параллельных направлению движения колец пьезокерамических преобразователей. Так, для движения столика по координату X к источнику многофазных элек,трических колебаний подключаются только те кольца пьезокерамических преобразователей, движущая сила которых (фиг.З) обозначена векторами 1/ Ej2,H ° координате У векторами F, , F,ti Fjj. Реверс движения осуществляется аналогично вышеопсанному.
Движение столика с поворотом по углу осуществляется путем создания в пьезокерамических преобразователях результируняцей движущей силы в разных направлениях.
На фиг.З приведена схема действующих сил для случая движения столика по углу. Если к преобразователям фазы источников электрических колебаний подсоединить так, чтобы в кольцах первого.преобразователя возбуждались бегущие волны в создающие движущие силы , и F, в кольцах третьего преобразователя в Fj, и fц а в кольцах второго преобразователя в Fji и Fj,,TO результирующие вектора силы первого F, и третьего Fj преобразователей будут однонаправлены/ а вектор F, второго преобразователя будет направлен в прютивоположную сторону. Действие сил по указанной схеме приводит к вращательному движению столика. Возможно несколько вариантов осуществлеиия вращательного движения. Если в преобразователях создать волновые колебания только в одном кольце создающие, например, движущие силы первого преобразователя , второго Fi и третьего преобразователя Fj (фиг.5), то результирукяцее движение столика будет происходить по углу поворота. Реверсирование движения осуществляется аналогично вышеописанному.
Амплитуда высокочастотных механических волновых колебаний колец пьезокерамических преобразователей, а тем самьм развиваемое усилие, изменяется в зависимости от амплитуды нгшряжения источников электрических колебаний. Возможность изменения развиваемых усилий пьезокерамических преобразователей и разновидности подключения их колец к мног,офазным источникам электрических колебаний через коммутатор режимов работы позволяет осуществлять сложное движение столика в плоскости.
Шаговый режим перемещения координатного вибропривода достигается
подсоединением пьезокерамических преобразователей к многофазным источникам электрических колебаний только на некоторое время с выбранной частотой подключений.
Экспериментальные исследования лабораторного макета показывают, что предлагаемое устройство позволяет осуществлять движение перемещаемого объекта по двум координатам и по углу поворота с независимым управлением и сложное движение в плоскости .
Формула изобретения
15
Координатный вибропривод, содержащий основание, закрепленные на н&л пьезокерамические преобразоват.ели, подключенные к многофазньм источни2Q кам высокочастотных электрических колебаний через коммутатор режимов работы и столик, фрикционно сопряженный с пьезокерамическими преобразователями, отличающийся тем.
что, с целью расширения функциональ25
ных возможностей и упрощения конструкции, преобразователи выполнены в виде пустотелой пьезокераМической сферы с вырезами, образующими два монолитных перекрещивающихся кольца, 30 причем преобразователи сопряжены со столиком в зонс1х пересечения колец.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР If 529509, кл. Н 01 L 21/66, 1976.
2.Авторское свидетельство СССР по заявке 2606358/18-10,
кл. G 02 В 21/32, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1980 |
|
SU948660A1 |
| Ртутный вибрационный коммутатор | 1980 |
|
SU868858A1 |
| Вибродвигатель | 1979 |
|
SU817811A1 |
| Вибропривод | 1979 |
|
SU771775A1 |
| Ртутный вибрационный коммутатор | 1983 |
|
SU1095258A1 |
| Устройство для ориентации подложек | 1978 |
|
SU790041A1 |
| Вибродвигатель | 1978 |
|
SU731500A1 |
| Вибропривод | 1979 |
|
SU851562A1 |
| Волновой вибродвигатель | 1977 |
|
SU621397A1 |
| Вибродвигатель | 1979 |
|
SU845198A1 |