(Б ) РОТАЦИОННЫЙ ЭЛЕКТРОВИСКОЗИМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Электровискозиметр | 1979 |
|
SU851190A1 |
| Электровискозиметр | 1981 |
|
SU949418A1 |
| Электровискозиметр со статическимуРАВНОВЕшиВАНиЕМ | 1979 |
|
SU800827A1 |
| Ротационный электровискозиметр | 1982 |
|
SU1055995A1 |
| Цифровой автоматический экстремальный мост переменного тока | 1983 |
|
SU1087903A1 |
| Весоизмерительное устройство | 1979 |
|
SU918793A1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока и устройство для его осуществления | 1983 |
|
SU1150553A1 |
| Электронные цифровые весы | 1981 |
|
SU966502A1 |
| Емкостный уровнемер | 1987 |
|
SU1582020A1 |
| Способ уравновешивания цифровых экстремальных мостов переменного тока и устройство для его осуществления | 1986 |
|
SU1418626A1 |
I
Изобретение относится к приборам для измерения вязкости и излучения реологических характеристик
жидких сред.
Известен ротационный эластовискозиметр, содержащий две рабочих поверхности, одна из которых связана с приводом, а другая - с силоизмерителем, выполненным в виде электромагнитного преобразователя, катушка намагничивания которого соединена с регулируемым источником питания, а исполнительная катушка соединена, через усилитель, с уравновешенным мостом, в одно из плеч которого включен датчик смещения.
Датчик смещения, жестко связан с траверсой, укрепленной на измерительном валу, и включен в плечо уравновешенного моста переменно- iго тока. Такая конструкция датчика обусловливает обратное воздействие преобразователя неравновесия - уравновешенного моста на датчик, что
снижает чувствительность эластовискозиметра, уменьшает его точность из-за наличия составляющей момента уравновешивания, не измеря- , емой вторичным прибором.
Намагничивающая катушка этого прибора соединена с регулируемым источником питания, синфазным с напряжением питания уравновешенного моста преобразователя неравновесия. Исполнительная катушка электромагнитного преобразователя уравновешивания подключается на выходное напряжение усилителя, фаза которого меняется в заьисимости от положения индукционного датчика неравновес11Я tO
Поскольку вторичный прибор не разделяет квадратурные составляющие тока в исполнительной катушке, то показания е.го будут нелинейны.
20
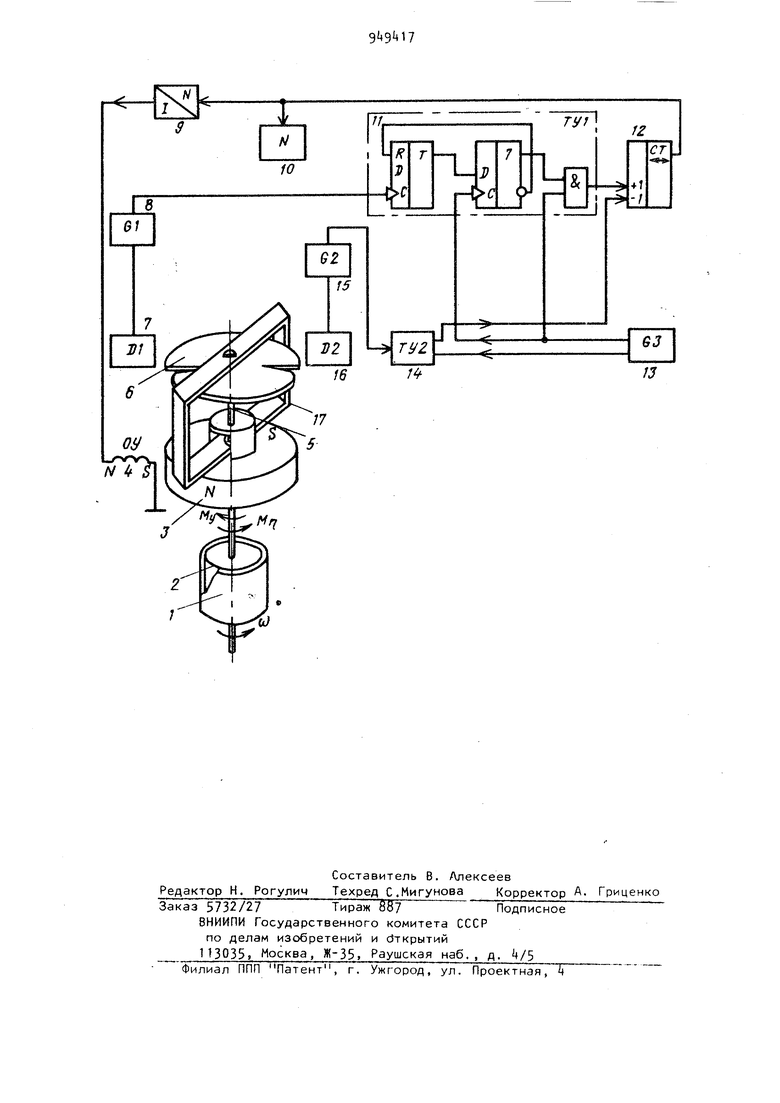
Наиболее близким по технической сущности к изобретению,является ро- . тационный вискозиметр, содержащий вращаемый внешний цилиндр, внутрен39НИИ цилиндр, преобразсязсЗ г ель еравновесия, поеобразоватепь уразиовешивания и отсчетное устройство. Функцию преобразователя неравновесия 8 данном приборе выполняют автогенератор, модулятор, электромагнит, сигнальная обмотка на рамке усилитель низкой частоты, фазовращатель , фазовый детектор и усилитель постоянного тока. Функцию же преобразователя уравновешивания выполняют электромагнит, исполнительная обмотка на рамке, соединенная с коммутируемым сопротивлением Г2. К недостаткам известного вискозиметра следует отнести то, что к его рамке прикреплены три токоподвода. что значительно снижает чувствительность прибора, а для обеспечения точности и повторяемости показаний, токоподводы изготовлены из материал с механическими свойствами, инвариантными к окружающей температуре. Автогенератор известного вискози метра весьма стабильный, ибо, в про тивном случае, фазовраи1атель имеет частотно-зависимый фазовый сдвиг ,, приводящий к изменению начальных условий. Это обстоятельство5 а такж температурная и временная нестабиль ность параметров модулятора, фазовр щателя и фазового детектора снижают точность и стабильность измерений. Компенсационный ротационный вискозиметр построен по методу астати ческого уравновешивания измеряемого момента вязкостного трения. При пос тоянной величине момента вязкостног трения система уравновешивания не имеет статической ошибки. Но при ис следовании зависимости напряжения сдвига от скорости деформации на вход вискозиметра подается измеряемый момент вязкостного трения, изме няющийся примерно с постоянной скоростью (1)о ггде - постоянная составляющая мо мента вязкостного трения; Ми - скорость изменения измеря™ емого момента. В этом случае появляется скорост ная ошибка, величина которой зависит как от скорости деформации так и от исследуемой жидкости, что делает невозможным коррекцию этой ошибки при градуировке. Повысить точность измерительного прибора можно только по™ вышая порядок астотизма системы ypaвнoвeшивa lия, Выходной ток в известном вискозиметре нелинейно зависит от угла поворота воспринимающего цилиндра. Поскольку уравновешивание статическое, то нелинейность датчика преобразователя Ьбразновесия выражается в нелинейности шкалы порядка 0, Однако если погрешность измерения вязкости, обуслозленная отклонением скорости вращения привода внешнего цилиндра от номинальной, составляет не более О 52| при использовании синхронного двигателяJ подключенного к напряжению ромышле -жой сети,, то погрешность от иелинейности составляет весьма значительную величину, В исполнительной обмотке, нахо дящейся на одной рамке с сигнальной обмоткой, наводится напряжение высокой частоть и выделяется на коммутируемсчм рез :сторе, подключенном на 8ХО-Д образ1.;ового вольтметра, который будучи цифровым, имеет на входе специальный фильтр, вносящий дополнительную погрешность. При изучении деформационных свойств упругих жидкостей на процессе перехо да через предел прочности очень сильное влияние может оказывать жесткость измерительного устройства; малое знб чение которой может способствовать сильному повышению CKOpocii деформации. При изучении жидкостей с высокой скоростью релаксации напряжения сдвига уравновешивающее устройство отличается высокой жесткостьюs однако в известном вискозиметре иесткость, определяемая быстродействием системы автоматического уравновешивания, не может обеспечить стабилизацию скорости деформации сдвига. Цель изобретения - повышение томности измерения вязкости и улучшение динамических характеристик. Поставленная цель достигается тем, что в ротационном электровискозиметре, содержащемВращаемый внешний цилиндр с исследуемой жидкостью, внутренний цилиндр, преобразователь неравновесия, преобразователь уравновешивания и отсчетное устройство, преобразователь неравновесия содержит два автогенератора, частотно-задающие злёменты которых выполнены в виде двух.пар пластин, между которыми помещена закрепленная на оси внутреннего цилиндра круглая пластинка 5 с симметричными вырезами, два тактирующих устройства, генератор тактовых импульсов и реверсивный счетчик причем выход каждого автогенератора соединен с одним из входов соответствующего тактирующего устройства, другие входы которого соединены с выходом генератора тактовых импульсов, а выходы тактирующих устройств подключены к разным входам реверсивного счетчика, выход которого соединен с входом отсчетного устройства, преобразователь уравновешивания содержит преобразователь цифрового кода в ток, выход которого соединен с обмоткой уравновешивания, расположенной под углом к оси полюсов кольцевого магнита, зaкpeплe+ нoгo на одной оси с внутренним цилиндром вход преобразователя цифрового кода в ток подключен к выходу реверсивного счетчика. На чертеже представлена принципиальная схема предлагаемого устройства. Схема содержит внешний вращаемый цилиндр 1, внутренйий цилиндр 2, кольцевой магнит 3 обмотку k уравновешивания, ось 5. круглую пластинку 6 с вырезами, частотнозадающие элементы 7, автогенератор 8, преобразователь 9 цифрового кода в ток, цифровое отсчетное устройство 10, тактирующие устройства 11, ре,вер сивный счетчик 12, генератор 13 тактовых импульсов, тактирующее устройство 14, автогенератор 15 частотно-задающие элементы 16 и несущую рамку 17. К синхронному электроприводу подсоединен вн ешний цилиндр 1 , в котором размещен внутренний цилиндр 2. Внутренний цилиндр 2, жестко связан с кольцевым магнитом 3, закрепленным на оси 5. которая установлена на несущей рамке 17- Н-а оси 5 закреплена круглая пластинка 6, имеющая вырезы, расположенные симметрично по диаметру и находящиеся между пластинами двух пар конденг саторов частотно-задающих элементов 7 и 16 автогенераторов 8 и 15. Выходы автогенераторов 8 и 15 соединены соответственно с входами тактирующих устройств 11 и И, на другие входы которых подключены выходы генератора 13 тактовых импульсов. Выходы тактирующих устройств подключемы на входы прямого и обратного сче76та реаерсивного счетчика 12. Выход счетчика 12 соединен с входами цифрового отсчетного устройства 10 и преобразователя 9 цифрового кода в ток, который связан с обмоткой k уравновешивания и вместе с ней и кольцевым магнитом 3 составляет преобразователь уравновешивания. Измерение вязкости предлагаемым вискозиметром осуществляется следующим образом. Исходное положение подвижной части преобразователя неравновесия обуславливает такое состояние емкостных частотно-задающих элементов 7 и 16, при котором частоты автогенераторов. 8 и 15 равны f fl,П) где f, и f 0 - соответственно частоты импульсов на выходах автогенераторов. Поэтому состояние реверсивного счетчика 12, отражаемое цифровым отсчетным устройством 10, определяется выр зжением N--5 .(VfJdt 0,C2.) где N - состояние счетчика; - t - время измерения, равное периоду между двумя несовпада. ющими тактовыми импульсами генератора 13. В этом случае ток на выходе преобразователя 9i протекающий через обмотку Ц уравновешивания, также равен нулю (3) Таким образом, уравновешивающий момент, обусловленный током уравновешивания и магнитным потоком Ф кольцевого магнита 3 также равен нулю , вФ ( где W - чийло витков обмотки уравновешивания;f - угол поворота подвижной части чувствительного элемента вискозиметра. Исходное положение, при котором выполняется условие (1) устанавливается автоматически, так как только в этом случае выполняется равенство (3) обеспечивающее , а значит, и неподвижность оси 5 внутреннего цилиндра. При работе вискозиметра внешний цилиндр 1 с исследуемой жидкостью приводится во вращение с постоянной скоростью, например, ci-inxpoHUbiM эпе.ч Tponpi-iRo.qoM со гтупенчатьм упр-твг ени ем скорости VJ, Возник; 3 Ц1-й на оси внутреннего цил -чндрл 2 иомеит вязкостного трения ;,., iipMBo.u.iT во вращз тельное -движен -ш г одви;;:ку-з 1асть преобразователя неравновесия г ось 5 с 6, а закрепленчый на ней кольцевой ь.эгнит 3При повороте подвижной част-1 возникают у ел о в и я J з-а с т а в л я loi..i и s час г о т- но-зздающие элементы 7 и 16 изменить частоту автогенераторов 8 и 15- Частота импульсов на генератора 15 больше частоты на выходе re;-iecaтора 8 (). В этом случае ние счетчика 12 изменяется з соответствии с ,выpaжeниe ц (iV,|ai до того момента t,, при котором частоты генераторов сраЕ1- Яются Такой момент непременно наступит, поскольку в соответстви / с кодом на входе преобразователя 9 определяемы счетчиком 12, увеличивается ток уравновешизанип и создается ураз|-1Овешивающий момент fUsj, который возвра тит подвижную часть чувствительного элемента в -Сходное положение, при котором fg f,.|. Отсчет нее цифровое устройство 10 отображает число импульсов, зафиксированных счетчиком,, а значит, и пропорциональный ему момент уразновешивания, равный момен ту вязкостного трения NW/ | И i 1 i 3: ТГк f.i LnulF) НИ измеряемь й момент вяз костного трения; передаточная функция, X.JP) описывающая движение подвижной части чувст вительного элементаj коэффициент переда-чи п р еоб Э а 3 о Е а т ел я нерав новесия; Р - оператор преобразован |у, Лапласа; t/ 2. коэффициент передачи преобразователя уравн вешизания; . разность частот автогенераторов ; .-Мч разность моментов, действующих на подвижную часть чувств и тельного элемен та. , Тактирую цие устройства 1 и включены для предотвращения сбоев в работе реверсивного счетчика i 2 путем устранения совпадающих импульсов частот f и f2. Тактируюшие устройства привязывают импульсы автогенераторов 8 и 15 к двум последовательностям несовпадающих тактовых импульсов, вырабатываемых генератором 13. В предлагаемом вискозиметре отсутствует обратное воздейсте.ие от преобразователя неравновесия на подвижную -есть, не имеется надобности в -око|-;одводаХ; что позволяет существе но -повьюить чувствительность прибора, В общую погрешность прибора не входят погрешности из-за температурной и временной нестабильности параметроз преобразователя уравновешиваьиля, поэтому не предъявляется особых -требований к точности и стабиль ности автогенераторов и тактирующего генератора. Применение вискозиметра при исследованиях реологических и деформациO ныx характеристик неньютоновских жидкостей повышает точность измерения мз-за отсутдтвия скоростной ошибки, что обеспечивается повышением астатизма системы уравновешива -,ия измеряемого момента. Распределение индукции вдоль дуги кольцевого магнита намагниченного в диаметральном направлении, описывается зависимостью 3 - где BjYf максимальное значение индукции в направлении оси намагниченности; в угол, отсчитываемый по дуге от этой оси. Поскольку 0 измеряется в тех же единицах, что . то и , угловой градиент магнитного поля (Ф/вЧ, входящий в выражение для момента уравновешивания (), определяетсяW (8) Отсюда видно, что момент уравновешиваний зависит от положения подвижной части чувствительного элемента и эта зависимость сказывается на переходном процессе уравновешивания. Чтобы исключить влияние зависимости момента уравновешивания от угла поворота подвижной части на круглой пластинке 6 сделаны вырезы таким образом, чтобы разность частот автогенераторов зависела от угла поворота согласно уравнению 4f arcsin4(9) Этим повышается устойчивость и точность вискозиметра в переходных режимах уравновешивания. Указанная зависимость С) момента уравновешивания от угла поворота подвижной части используется для ста билизации скорости деформации при из мерении момента вязкостного трения жидкостей с высокой скоростью релаксации напряжения сдвига. Обмотка Ц уравновешивания и кольцевой магнит 3 расположены таким образом, что при движении внутреннего цилиндра под действием момента вязкостного трения угловой градиент магнитного поля полюсов кольцевого магнита, раз ноименных с близлежащими полюсами обмотки уравновешивания, увеличивается, т.е. dФ/d возрастает с увеличением Ми. Это обсто)ятельство приводит к тому, что даже при неизменном токе уравновешивания, который из-за инерционности системы уравновешивания не может мгновенно изменяться, подвижная система обладает жесткостью, необходимой для стабилизации скорости деформации. Погрешность вискозиметра в устано вившемся режиме и в режимах реальных скоростей изменения напряжения сдвиг исследуемых жидкостей определяется только погрешностью преобразователя цифрового кода в ток. При использова нии типовых цифро-аналоговых преобра зователей, построенных на интегральных схемах, эта погрешность находится в пределах 0,05. Таким образом, в предлагаемом изобретении значительно повышена точность измерения вязкости и обеспечено улучшение динамических характеристик. Данный электровискозиметр предназ начен для изучения реологических характеристик структурированных жидкостей. Наличие цифрового выхода результатов измерений позволяет использовать для обработки этих результатов цифровую вычислительную ма-шину. Формула изобретения Ротационный электровискозиметр, содержащий вращаемый внешний цилиндр, внутренний цилиндр, преобразователь неравновесия, преобразователь уравновешивания и отсчетное устройство, отличающийся тем, что, с целью повышения точности измерений вязкости и улучшения динамических характеристик, преобразователь неравновесия содержит два автогенератора, частотНО задающие элементы которых выполнены в виде двух пар пластин, между которыми помещена закрепленная на оси внутреннего цилиндра круглая пластинка с симметричными вырезами, два тактирующих устройства, генератор тактовых импульсов и реверсивный счетчик, причем выход каждого автогенератора соединен с одним из входов соответствующего тактирующего устройства, другие входы которого соединены с выходом генератора тактовых импульсов, а выходы тактирующих устройств подключены к разным входам реверсивного счетчика, выход которого соединен с входом отсчетного устройства, преобразователь уравновешивания содержит преобразователь цифрового кода в ток, выход которого соединен с обмоткой уравновешивания, расположенной под углом к оси полюсов кольцевого магнита, закрепленного на одной оси с внутренним цилиндром, вход преобразователя цифрового кода в ток подключен к выходу реверсивного счетчика. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР f 301598. кл, G 01N:11/14, 1971. 2.Авторское свидетельство СССР N- 702269, кл. G 01 N 11/14, 1972 (прототип).
/v
fO
16
17
,
G3
13
