Изобретение относится к технике измерения массы и может быть исполь зовано при конструировании точных весов.
Известны бескоромысловые электромагнитные весы, содержавшие подвижную часть с грузопрке шым устройством систему подвески, преобразователь некомпенсадии, выходной сигнал которого преобразуется в ток, напряжение, частоту, 4 азовый сдвиг, электрическую систему уравновешивания и цифровое отсчетное устройство, в качестве которого испсУхьзувтся цифровой прибор 13.
Весы такого типа универсальны, но имеют ограниченную точность.
Наиболее близкими к предлагаемьш по технической сущности являются электррнные цифровые fieсы, содержачуле подвижную часть с. грузоприемным устройством, последовательно включенные преобразователь компенсации, управляемое генераторы, тахчитатель частот, реверсивный счетчик, отсчетное устройство, а также компенсатор и последовательно соединенные преобразователь кода в относительную .л; тельность интервала времени в преобразователь относительной длительное-ти интервала времени в ток, выход которого подключен к сумматору, к второму входу которого подключен источник тока тары, причем выход сумматора связан с компенсатором, при зтом преобразователь кода в относительную длительность интервала времени содержит RS-триггер, опорный счетчик, к входу которого подключен
10 опорный генератор, и цепь совпадения кодов, связанную с опорным и реверсив|5ым счетчиками С23.
Недостатком устройства является сравнительно низкая точность из-за
15 пульсации компенсирующего тока.
Цель изобретения - увеличение точHOCTJ и быстродействия.
Для достижения поставленной цели в. известное устройство введены преоб20разователь код-частота, 0-триггер и логический коммутатор, причем входы преобразователя код-частота соединены с младшими разрядами реверсивного счетчика и стар1:шми разрядами
25 опорного счетчика преобразователя кода в относительную длительность интервала времени, а прямой . и инверсные выходы его подключены к входам логического коммутатора, другие
30 входа которого через О-триггер и
непосредственно связаны с выходом цепи совпадения кодов, а выход соединен с R-входом RS-триггера преобразователя кода в относительную длительность интервала времени.
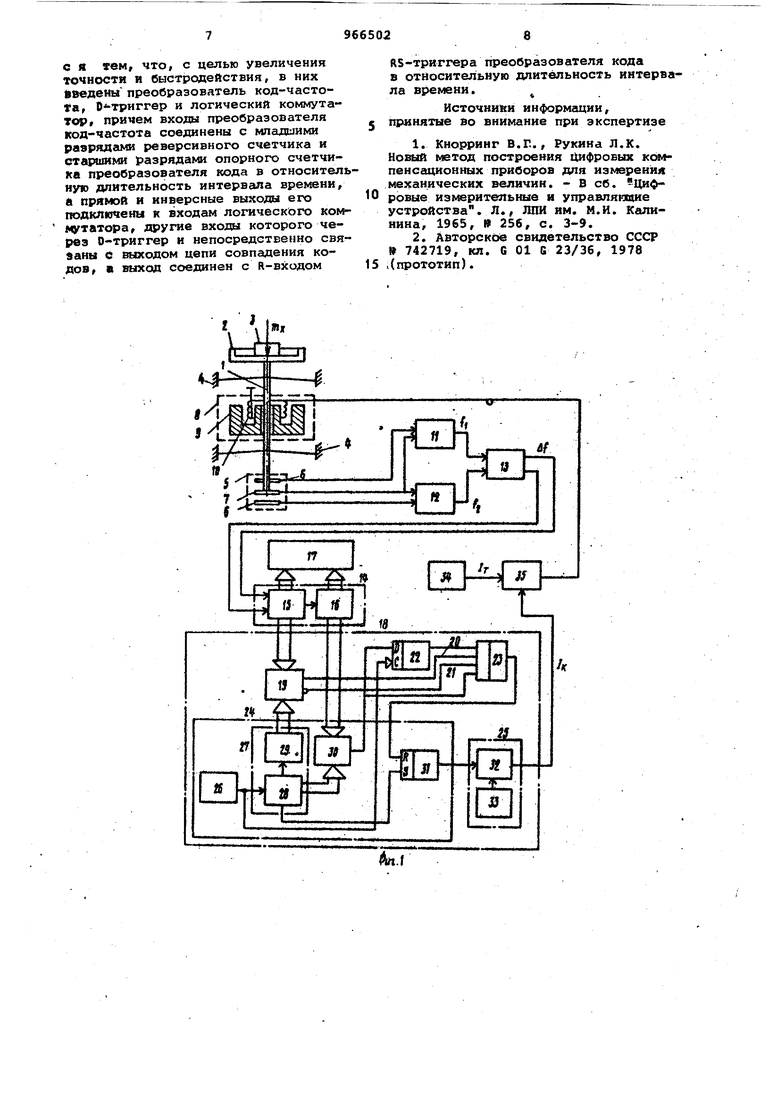
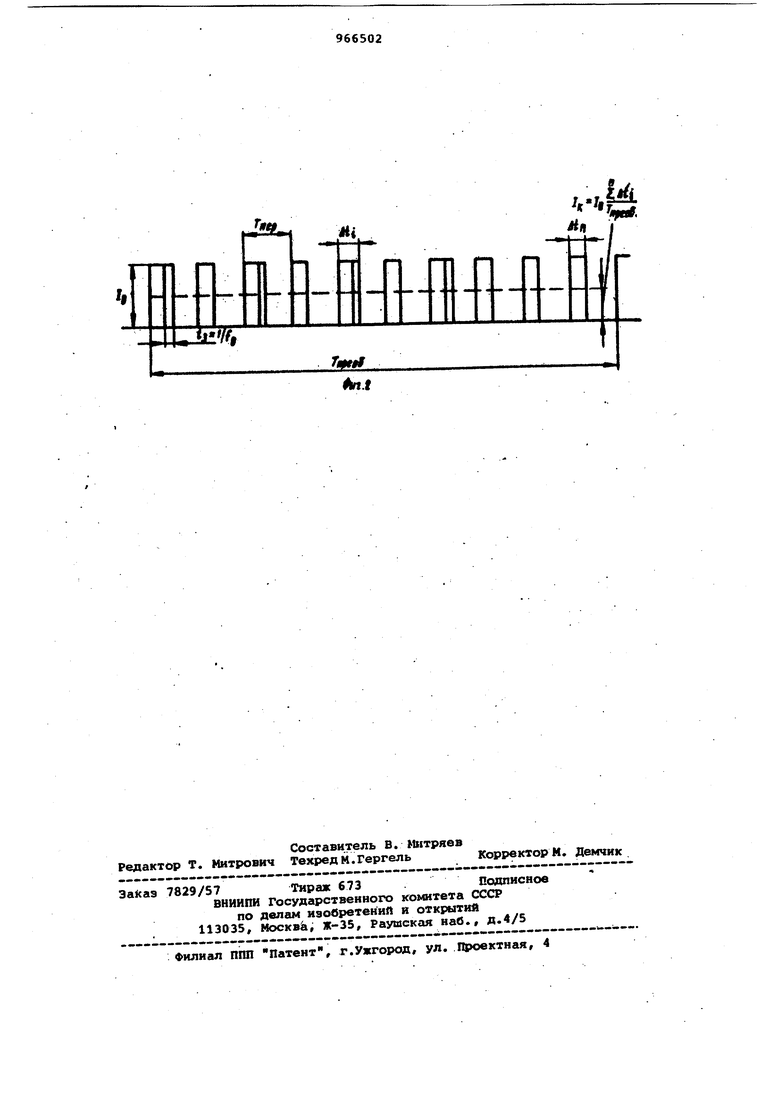
На фиг. 1 показана структурная схема электронных цифровых весов; на фиг. 2 - временные диаграммы сигналов в цепи обратной связи электронных цифровых весов.
Цифровые весы содержат подвижную часть 1 с грузоприемным устройством 2, на которое устанавливают объект 3 с измеряемой массой, закрепленной на подвесках 4, преобразователь некомпенсации 5 с неподвижными пластинами 6 и подвижной плстиной 7, жестко связанной с подвижной частью 1, компенсатор 8 с постоянным магнитом 9, в зазоре которого размещена катушка 10, закрепленная на подвижной части 1, управляекые генератор 11 и 12, вычитатёль частот 13, реверсивный счетчик 14 с младшими декадами 15 и старшими декадами 16, отсчетное устройство 17 преобразователь код-аналог Д8., преобразователь код-частота 19 с прямлм выходом 20 и инверсным выходом 21, О-триггер 22, логический коммутатор 23, преобразователь кода.в относительную длительность интервала времени 24, преобразователь относительной длительноЬти интервала времени в ток 25. Преобразователь 24 состоит из опорного генератора 26, опорного счетчика 27 с младшими декадами 28 и старшими декадами 29, цепи совпадения кодов 30 и RS-триггера 31, а преобразователь 25 содержит ключ 32 и источник тока 33. Кроме этого/ имеется регулируемой источник тока тары 34 и суммирующий блок 35.
Работа устройства основана на компенсации силы тяжести взвешиваемого груза силой, создаваемой компенсатором 8 и определяемой взаимодействием магнитного поля постоянного магнита 9 с осредненным током в катушке 10, определяемым как
л-ti п
де IP - стабилизированный ток источника тока 33;
ац - длительность импульса тока период преобразования, определяюши:гся отношением объема опорного счетчика 27 к частоте импульсов опорного генератора 26;
k число импульсов тока в период преобразования; показания реверсивного счетп чика 14; объем опорного счетчика.27.
М Формирование импульсов тока осуществляется реверсивным счетчиком 14 и опорным счетчиком 27. .
Электронные цифровые весы работают следующим образом.
В исходной позиции при отсутствии измеряемого объекта 3 на грузоприемном устройстве 2 подвижная пластина 7, жестко скрепленнёш с подвижной частью 1, находится в центральном положении. При-этом управляемые генераторы 11 и 12 имеют одинаковые частоты f и %,а разность частот на выходах вычитателя частот 13 равна нулю, т.е. ikf f - О, кодовая комбинация на выходах реверсивного счетчика 14 имеет вид 0000 и показания отсчетного устройства 17 также равны нулю.
В режиме взвешивания при установлении объекта 3 на грузоприемное устройство 2 подвижная часть 1 вместе с подвижной пластиной 7 перемещается, генераторы 11 и 12 рассогласовываются и на выходе вычитателя частот 13 появляется сигнал разностной частоты ±&f f - f2 . Реверсивный счетчик 14 производит подсчет импульсов, пришедших за время процесса уравновешивания переходного процесса и управляет преобразователем код-аналог 18.
По мере роста числа импульсов в реверсивном счетчике 14 увеличивается и время пребывания триггера 31 преобразователя кода в относительную длительность интервала времени 24 . в единичном состоянии, определяеьюе разностью между моментами поступления на него импульсов переполнения с опорного счетчика 27 цепи совпадения кодов 30 через логический комк татор 23. Это приводит к ув ушчению длительности импульса тока ut,- , а следовательно и росту компенсирующего тока I ц. Процесс изменения тока I продолжается до тех пор, пока в реверсивном счетчике 14 не наберется кодовая комбинация, пропорциональная измеряемой массе объекта. Отсчет измеряемой массы т ведется по отсчетному устройству 17, которое калибруется в единицах массы.
После того, как произведено уравновешивание током 1ц, подвижная част 1 возвращается в исходное состояние, а ее подвижная пластина 7 занимает центральное положение. При этом частоты f и f генераторов 11 и 12 становятся одинаковыми, разность частот Af на выходах вычитателя частот 13 равна нулю , а реверсивный счетчик 14 останавливается, запоминая набранную кодовую комбинацию, пропорционально измеряемой массе. При этом код, записанный в младших декадах 15 реверсивного счетчика 14, сравнивается с текущим значением коЛа младших декад 28. опорного счетчи ка 27 при помощи цепи совпаденияко X дов 30. В момент равенства этих кодов сигнал с выхода цепи совпадения кодов 30 поступает на О-вход 0-триг гера 22, на Q-вход которого поступа ют импульсы с опорного генератора 26, и на вход логического коммутато 23. При отсутствии импульса на прямом выходе 20 преобразователя 19 сигнал с выхода цепи совпадения кодов 30 поступает на R-вход RS-триггера 31 без изменений. При наличии импульса сигнал поступает удлиненным на длительность одного тактового, импульса.) определяемого опорным генератором 26. Задержка t: g- вносится в схему О-триггером 22. На S-вход RS-триггера 31 поступает сиг нал ( импульс переполнения ) с младши декад 28 опорного счетчика 27. Таким образом, в течение периода преобразования ТпреоБр ключ 32 преобразователя 25 поступает последова тельность импульсов, причем длитель ность некоторых из них увеличена на один такт t-. При этом частота переключения RS-триггера 31f..po определяется частотой переполнения младших декад 28 опорного счетчика 27. Временная диаграмма работы ключа 32 преобразователя 25 приведена на фиг. 2. Пример . Пусть в реверсивн трехдекадном счетчике 14 записано число 253. При частоте опорного генератора 26, равной 1 мГц, на пре образование такого числа в весах (фиг. 2) требуется 253 мкс, при этом частота переключения RS-тригf%pa 31 равна 1 кГц. Для повышения разрешающей способности прибора наращивают реверсивный счетчик 14 снизу, добавив одну младшую декаду а опорный счетчик .27 - сверху, доба вив одну старшую декаду 29, Сфиг.2) Пусть в реверсивном счетчике 14 записано уточненное число 2537, тогда при сохранении той же частоты опорного генератора 26 на преобразо ние этого числа требуется 253,7 мкс Число 7 преобразовывают в импульсную последова ельность, состоящую и .семи импульсов в одном периоде преобразования, определяемом частотой переполнения старшей декады 29 опор ного счетчика 27, т.е. за период преобразованияТ„ррд5р логический коммутатор 23 пропускает семь импул сов длительностью 254 мкс, а три им пульса длительностью 253 мкс, что в среднем дает требуенлэе время преобразования. При этом частота перек лючения RS-триггера 31 остается рав ной 1 кГц. В известном устройстве для преоб аэования этого же числа п :равных условиях равном числе ПРР кад реверсивного н опорного счетчиков, той же частоте опорного генератора требуется 2537 мкс, при этом частота переключения RS-триггера уменьшается в 10 раз, и становится равной 100 Гц, погрешность от пульсаций увеличивается. При дальнейшем увеличении точности (добавление пятой и шестой декад реверсивного счетчика) частота переключения RS-триггера известного устройства падает до 10 Гц и 1 Гц. Столь низкие частоты сравнимы- с частотой резонанса подвижной части весов или лежат ниже ее, что требует использования в преобразователе относительной длительности в ток фильтров нижних частот с большими постоянными времени (единицы и десят ки секунд) которые и определяют быст-г родействие весов. Таким образом, очень высокая потенциальная точность преобразователей код-аналог с изменяюцейся относительной длительностью интервала времени (достижимая точность характеризуется погрешностью ниже) оказывается практически гнереализуемой из-за недопустимого падения быстродействия весов и роста погрешности пульсации. В предлагаемых электроннызс цифровых весах при увеличении числа декад реверсивного счетчика высокая частота переключения RS-триггера сохраняется. Это позволяет либо исключить фильтры нижних частот, либо использовать их с малыми постоянными времени, что существенно Повышает точность преобразователя коданалог. Формула изобретения Электронные цифровые весы, содержащие подвижную часть с грузоприе -: ным устройством, последовательно включенные преобразователь некомпенсации, управляемые генераторы, вычитатель частот, реверсивный счетчик, отсчетное устройство, а такксе компен сатор и последовательно соединенные преобразователь кода в относительную длительность интервгша времени и преобразователь относительной длительности интервала времени в ток, выхоД которого подключен к сумглатору, к второму входу которого подключен источник тока тары, причем выход сум матора связан с компенсатором, при этом преобразователь кода в относи- тельную длительность интервала времени содержит RS-триггер, опорный счетчик, к входу которого подключен опорный генератор, и цепь совпадения кодов, связанную с опорным и реверсивным счетчиками, отличающиеС л тем, что, с целью увеличения точности и быстродействия, в них введены преобразователь код-частота, О триггер и логический коммутатор, причем входы преобразователя код-частота соединены с младшими разрядами реверсивного счетчика и старшими разрядами опорного счетчика преобразователя кода в относительную длительность интервала времени, а прямой и инверсные выходы его подключены к входам логическЬго коммутатора, другие входы которого через 0-триггер и непосредственно связаны с выходом цепи совпадения кодов, в выход соединен с R-входом
ftS-триггера преобразователя кода в относительную длительность интервала времени.
Источники информации, принятые во внимание при экспертизе
1.Кнорринг В.Г., Рукина Л.К. Новый метод построения Цифровых компенсационных приборов для измерения механических величин. - В сб. Цифровые измерительные и управляклше устройства. Л., ЛПИ им. М.И. Калинина, 1965, 256, с. 3-9.
2.Авторское свидетельство СССР 742719, кл. G 01 G 23/36, 1978
5 .(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровые весы | 1982 |
|
SU1089423A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Электронные цифровые весы | 1978 |
|
SU742719A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| Устройство для измерения синусоидального напряжения | 1982 |
|
SU1104428A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Цифровой вольтметр эффективных значений | 1976 |
|
SU605312A1 |
| Цифровой измеритель температуры | 1985 |
|
SU1303849A1 |
| Мера фазового сдвига | 1983 |
|
SU1103156A1 |
| Устройство для измерения низких частот | 1981 |
|
SU966618A1 |
(т
..-liVV
ФПЛ
