(54) УСТГОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОЧУВСТВЛЕННЫМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU842700A1 |
| Устройство для контроля удароопасности массива горных пород по сигналам акустической эмиссии | 1989 |
|
SU1742475A1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО СЛЕЖЕНИЯ ЗА ДЕЯТЕЛЬНОСТЬЮ СЕРДЦА И ЛЕГКИХ | 2002 |
|
RU2236169C2 |
| Устройство для учета движущихся объектов | 1981 |
|
SU1012292A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ТОКА РАЗРЫВА ПРИ КОНТРОЛЕ ИНТЕНСИВНОСТИ ИСКРЕНИЯ ЩЕТОК ЭЛЕКТРИЧЕСКИХ МАШИН | 1992 |
|
RU2037835C1 |
| Оптоэлектронный автосортировщик | 1983 |
|
SU1106554A1 |
| Корректор движений | 1982 |
|
SU1044292A1 |
| Устройство автоматического контроля качества движущегося проката | 1991 |
|
SU1753393A1 |
| Измеритель высоты нижней границы облаков | 1982 |
|
SU1149766A1 |
| Устройство для диагностики дизельного двигателя внутреннего сгорания | 1979 |
|
SU862027A1 |
1
Изобретение относится к области робототехники и может быть нспользовано при создании очувствленных копирующих манипуляторов.
По основному авт. св. № 842700 известно устройство J содержащее датчик усилий, аналогоимпульсный преобразователь и злектроды, а также пороговый элемент и последовательно соединенные формирователь команд, коммутатор, измеритель межзлектродного сопротивления, элемент памяти и регулируемый усилитель, выход которого подключен ко входу аналого-импульсного преобразователя, выходом соединенного со входом формирователя команд и вторыми входами злемента памяти и коммутатора, связанного с злектродами, а выход датчика усилий подключен ко второму входу регулируемого усилителя и через пороговый злемент - ко второму входу измерителя межзлектродного сопротивления 1.
В зтой устройстве учитьшается изменение межзлектродного сопротивления, которое в течение времени работы влечет непредусмотренное измеиеиие электрических управляющих сигналов, подаваемых на мыщцы, и, таким
образом, непредсказуемо влияет на итенсивность сокращения мыщц. Однако недостатком этого устройства является то, что интенсивность сокращения мыщцы tm адекватный сигнал в начале и конце работы оператора также существенно различается вследствие утомления мьщщы ц процессе электростимуляции.
Цель изобретения - повьпиение точности устройства.
Указанная цель достигается тем, что уст
10 ройство 1. содержит последовательно соединенные датчик механических колебаиий мыщцы и преобразователь сигнала, выход которого подключен к третьему входу регулируемого усилителя.
IS
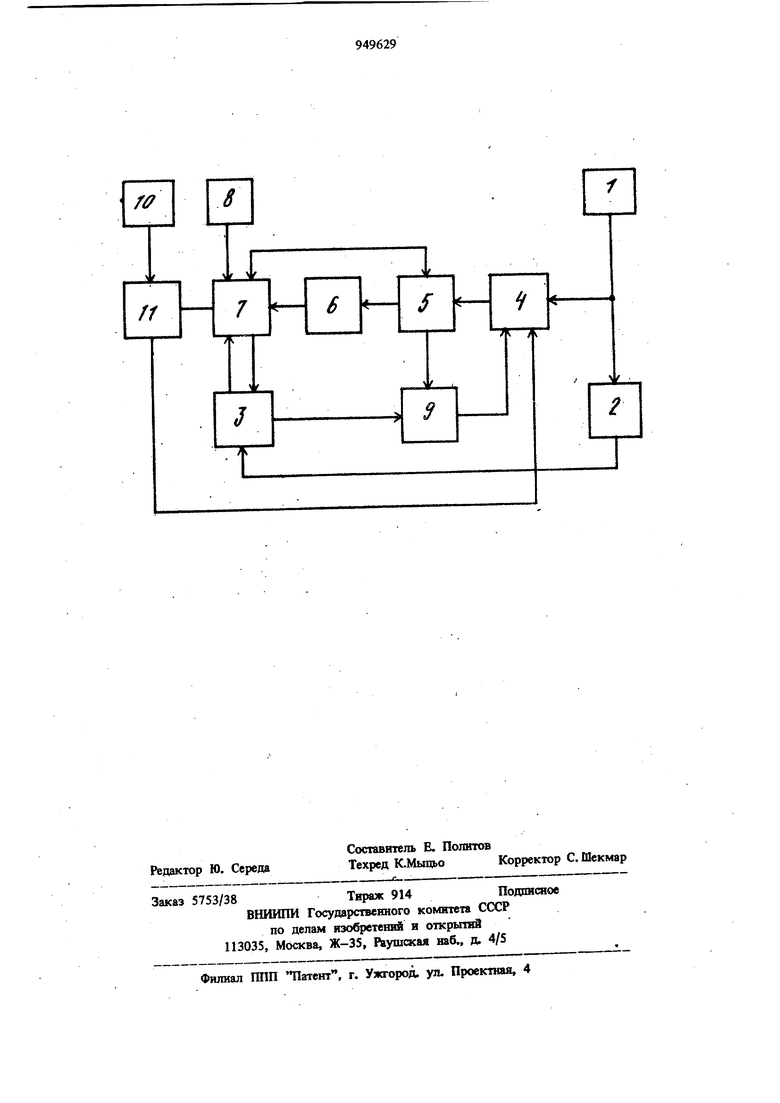
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство содержит датчик 1 усилий, пороговый элемент 2, измеритель 3 межэлектрод20ного сопротивления, регулируемый усилитель 4, аналого-икшульсный преобразователь 5, формирователь команд 6, коммутатер 7, злектроды В, злемент 9 памяти, одтчик 10 механических колебаний мышцы, преобразователь 11 сигнала.
Устройство работает следующим образом, Усилия и моменты на исполнительном органе манипулятора регистрируются датчиком 1, $ сигнал с которого поступает на пороговый элемент 2 и через регулируемый усилитель 4 на аналого-импульсный преобразователь 5. При наличии сигнала с датчика 1 на выходе, порогового элемента 2 формируется коман- ю да, включающая измеритель 3 межэлектродного сопротивления, и через коммутатор 7 с электродов 8 замеряется межэлектродное сопротивление мыщц оператора, С выхода измерителя 3 сигнал, соответствующий намеренно- 15 му сопротивлению, поступает на элемент 9 памяти, где запоминается. Величина этого сигнала определяет коэффициент усиления регулируемого усилителя 4, через который проходит сигнал от датчика 1 к аналого-импульсному пре- 20 обраэователю 5. С выхода аналого-импульсного преобразователя 5 импульсы поступают на другой вход элемента 9 памяти, отключая его от измерителя 3 передним фронтом импульса и обнуляя и подключая обратно отрицательным 25 фронтом, кроме того, импульс с преобразователя 5 в формирователе 6 команд преобразуется таким образом, что коммутатор 7 при наличии этих импульсов подключает электроды 8 к преобразователю 5, а в паузе меж- зо ду импульсами к измерителю 3, который замеряет межэлектродное сопротивление.
Такнм образом, в паузе между импульсами происходит измерение межэлектродного сопротивления, запоминание амплитуды, соответствующей этому сопротивлению, и поддержание установленного коэффициента усиления в регулируемом усилителе 4 в период импульса.
При изменении сопротивления между электродами 8 относительно начального, изменяет- у ся коэффициент усиления регулируемого усилителя 4 и соответственно изменяется амплитуда сигнала аналого-импульсного преобразователя 5, воздействующего на мышцу оператора.
Под действием электрического сигнала обрат ной связи, вызывающего сокращение мьщщы оператора, пропорциональное усилию, возникающему на исполнительном- органе манипулятора, в мышце возникают механические колебания, параметры которых (собственная частота колебаний, логарифмический декремент затухания, скорость распространения волны) являются показателями упруго-вязких свойств мышцы.
Регистрируемые датчиком 10 механических колебаний мышцы механические колебания поступают в преобразователь 11, где вырабатывается сигнал, управляющий коэффициентом усиления регулируемого усилителя 4,
Таким образом, в устройстве происходит измерение упруго-вязких свойств мыщцы и поддержание соответствия интенсивности сокращения мышцы, соответствующей нагрузке на исполнительном органе манипулятора за счет изменения коэффициента усиления в усилителе 4.
Применение предлагаемого изобретения позволяет оператору ощущать с высокой точностью величину усилий на исполнительном органе независимо от развития утомления в мышце.
Формула изобретения
Устройство для управления очувствленным манипулятором по авт, св. № 842700, отличающееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные датчик механических колебаний мышцы и преобразователь сигнала, выход которого подключен к третьему входу регулируемого усилителя.
Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 842700 по заявке N 2816748/18-24, кл. G 05 В 11/00, 1979 (прототип).
