ИзоЯретение относится к рентгенов ской диагностике, а Ъолее конкретно к томоЕрафическим вычислительным уст ройствам. Известно рентгеновское томографическое устройство, содержащее источник проникающего излучения, детекторное устройство, имеющее по меньшей мере один детектор излучения для получения сигналов измерения, раму-, держатель источника .и детекторного устройства, привод переме г,ения источ ника и детекторного устройства для сканирования части тела пучком излуч ния, детектор положения для определе ния координат измерительной траектории, по которой проходит пучок излучения, устройство обработки для опре деления величин поглощения по сигналам измерения, запоминающее устройство для запоминания иоличин поглоще ния и дисплей для индикации величин поглощения tl В указанном, устройстве величины поглощения в элементах матрицы, наложенной на исследуемое сечение тела, рассчитываются с помощью метода последовательного приближения с полу чевой коррекцией.При этом обработка( производится после накопления полного объема данных, т.е. после окончания сканирования. В результате этого необходим большой объем памяти .ЭВМ. Кроме того, этот метод характеризуется большим количеством вычислительных операций. Сокращение времени восстановления изображения достигается в томографических вычислительных устройства::, в которых осуществляется приближенный расчет методом интерполяции промежуточных величин вкладов в различные элементы изображения С23. Известно также томографическое вычислительное устройство, в котором измеренные величины фильтруют,интерполируют путем полинсмной подгонки с помощью полинома высокого порядка, а затем по интерполированным данным, полученным для точек, эквидистантно распределенных в пространстве, с помощью соответствующего алгоритма восстанавливают изображение- ГЗ. Известные томографические устрой,ства характеризуются сложностью выполнения устройства обработки измеренных величин. Наиболее близким к предлагаемому является томографическое вычислитель ное устройство, снабженное быстродей ствующим процессором и содержащее по меньшей мере один источник проникаю щего излучения, детекторное устройство, имеющее по. меньшей мере один детектор излучения для получения сигналов измерения, раму-держатель источника и детекторного устройства привод перемещения, по меньшей мере, источника для сканирования части те ла пучком излучения, детектор положе ния для определения координат измерительной траектории, по которой проходит пучок излучения, устройство обработки для определения вели чин поглощения по сигналам измерени запоминающее устройство для запонкнания величин поглощения и дисп.пей для индикации величин поглощения, ,причем устройство обработки содержи входное запоминакядее устройство и устройство фильтрации запомненных сигналов измерения для полупения вкладов каждого сигнала измерения в восстанавливаемое изображение 4 J Недостатком такого томографичес кого устройства является сложность использованного в нем устройства об работки . Цель изобретения - упрощение уст ройства обработки в томо граОическом вычислительном устройстве. Поставленная цель достигается те что в томографическом вычислительно устройстве, содержащем по меньшей м ре один источник проникающего излуч ния, детекторное устройство по меньшей мере одним детектором излучения для получения сигналов измере ния, раму-держатель источника и детекторного устройства, привод перемещения, по меньшей мере, источника для сканирования части тела пучком излучения, детектор положения для определения координат измерительной траектории, по которой проходит пучок излучения, устройство обработки для определения величин поглощения по сигналам измерения, запоминающее устройство для запоминания величин поглощения и дисплей для индикации величин поглощения, устройство обработки содержит генератор весовых множителей как функции координат элемента матрицы обработки, для кот рого рассчитывается вклад и величину поглощения, и координат измерительной траектории, вдоль которой получен сигнал измерения, причем эти координаты поступают на генератор весовых множителей, по меньшей мере одну схему умножения для перемножения сигнала измерения и соответствующего весового множителя, ко торая подключена к генератору весовых множителей, и сумматор, который подключен к выходу схемы умножения и предназначен для суммирования рассчитанных на каждый элемент матрицы вкладов, причем выход этого сумматора подключен к запоминающему устройству. При этом, в случае выполнения детекторного устройства D виде набора смежно рассчитанных в пределах пучка излучения детекторов, генератор весовых множителей разбит на несколько независимых субгенераторов, количество которых, по меньшей мере, равно количеству детекторов, причем на каждый субгенератор введена по меньшей мере одна схема умножения. Кроме того, каждый субгенератор содержит память весовых мнокителей и схему формирования адреса для поиска весового множителя в памяти по координатам измерительной траектории и элемента матрицы, к которому относится этот весовой мнояситель. В другом варианте каждый субгенер тор содержит память весовых множителей, в которой запомнена таблица весовых множителей, ащресом для которой служат координаты измерительной траектории и элемента матриидл. Кроме того, схема формирования адреса содержит одну арифметическую схему для однократного определения для казкдого сигнала измерения расстояния между элементом матрицы и измерительной траекторией с целью форглирования адреса для памяти весовых множителей и cxeNbi сложения для определения из найденного арифметической схемой расстояния остальных расстояний путем последовательного прибавления расстояния между центрами двух соседних элементов, умно)хенного на тригонометрическую функцию угла между измерительной траекторией соответствующей сигналу измерения и системой координат матрицы. При этом, для каждой схег«л формирования адреса введены несколько схем умножения и такое же количество схем сложения, которое равноколичеству элементов в строке матрицы и которые отнесены к номерам элементов в строке, причем выходы этих схем сложения подключены через уплотнитель к памяти весовых множителей, выход которой через разуплотнитель подключен к последующим схемам умножения, поставленным в соответствие со схемой сложения. При этом уплотнитель, память весовых множителей и разуплотнитель подразделены по меньшей мере на две параллельно работающие части, причем к каждой части подключена пропорциональная. часть поставленных в соответствие схем сложения и схем умножения. При этом выход всех схем умножения, отнесенных к и тому же
номеру элемента матрицы, подключены к входу схемы суммирования, причем количество схем суммирования в сумматоре равно количеству элементов в строке матрицы, выход этой схемы суммирования подключен через выходную схему сложения к одномерному 3апоминающему пространству запоминающего устройства для запоминания величин поглощения для элементов столбца матрицы.
При этом каждая схема суммирова- : НИН разделена на первуьэ и вторую схемы суммирования, причем пропорциональная часть выходов схем умнокения подключена к первой схеме суммирования, а выходы указанной первой схемы суммирования подключены через промежуточную память с запоминающей ячейкой к второй схеме суммирования, выход которой подключен к входу выходной схемы сложения.
При этом, выход каждой схемы умножения подключен через буферную память с запоминающей ячейкой к входу cxeNKi суммирования.
В другом варианте выход всех схем умножения, отнесенных к одному и тому же номеру элемента, подключен к входу схемы суквадрования, причем количество схем суммирования в сумматоре равно количеству элементов в строке матрвды, выход указанной схемы суммирования подключен к одномерной памяти на сдвиговь1х регистрах запоминающего устройства, выход которой подключен к другому входу схе.мы суммирования.
Еще в одном варианте для каждой схемы формирования адреса введена одна схема умножения и несколько схем cJJoжeния, количество которых равно количеству элементов в строке матрицы и которые отнесены к номерам элементов в указанной строке, причем выходы схем сложения подключены через схему умножения к памяти весовых множителей, выход которой подключен к схеме умножения, подключенной к разуплотнителю7 снабженному несколькими выходами, связанными со схемами сложения, причем все разуплотнители, отнесенные к одному и тому же номеру элемента матрицы, подключены к входам схемы, суммирования, количество схем сук шрования равно количеству элементов в строке матрицы, а выход указанной схемн суммирования подключен через выходну -5 схему сложения к одномерному запоминакнцему пространству устройства для запоминания величин поглощения элементов i. в столбце матрицы.
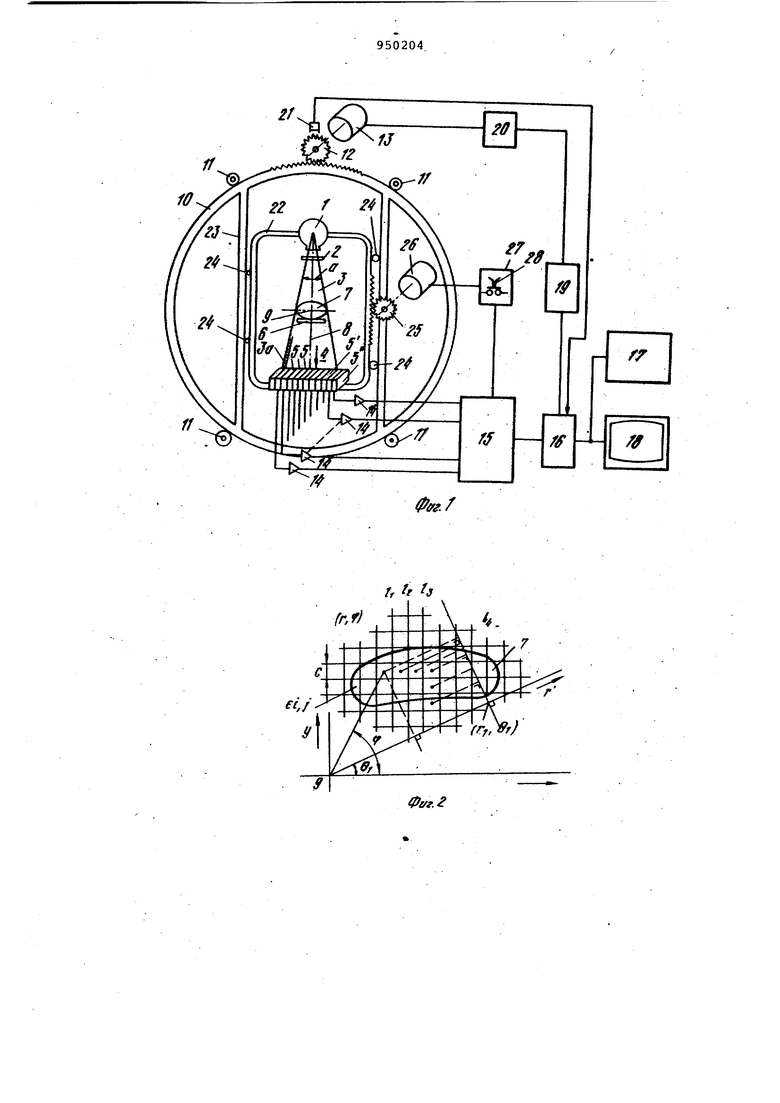
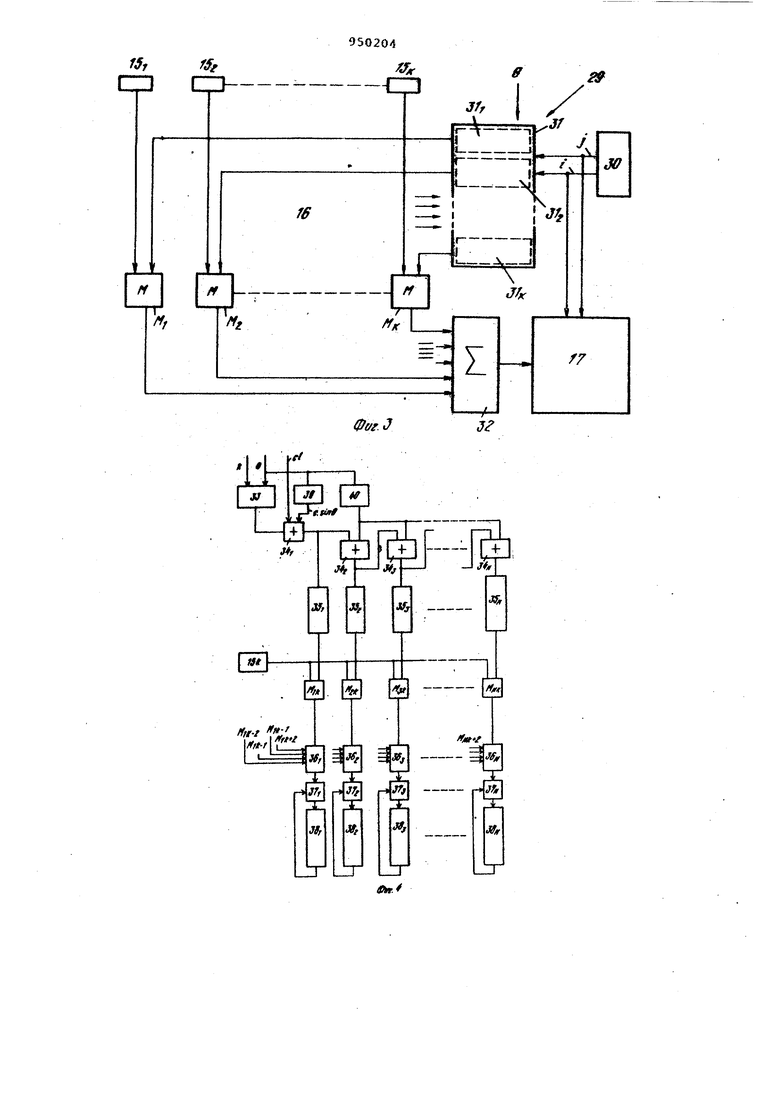
На фиг. 1 показана схема вычислительного томографа на фиг. 2 - матрица элементов, на основе которой производится определеЕше вкладов величин поглощения} на фиг. 3 - блоксхема одного варианта выполнения устройства обработки и запог-тнаюпего устройства; на фиг. 4 - более подробная блок-схема предпочтительного ваг рианта выполнения части устройства
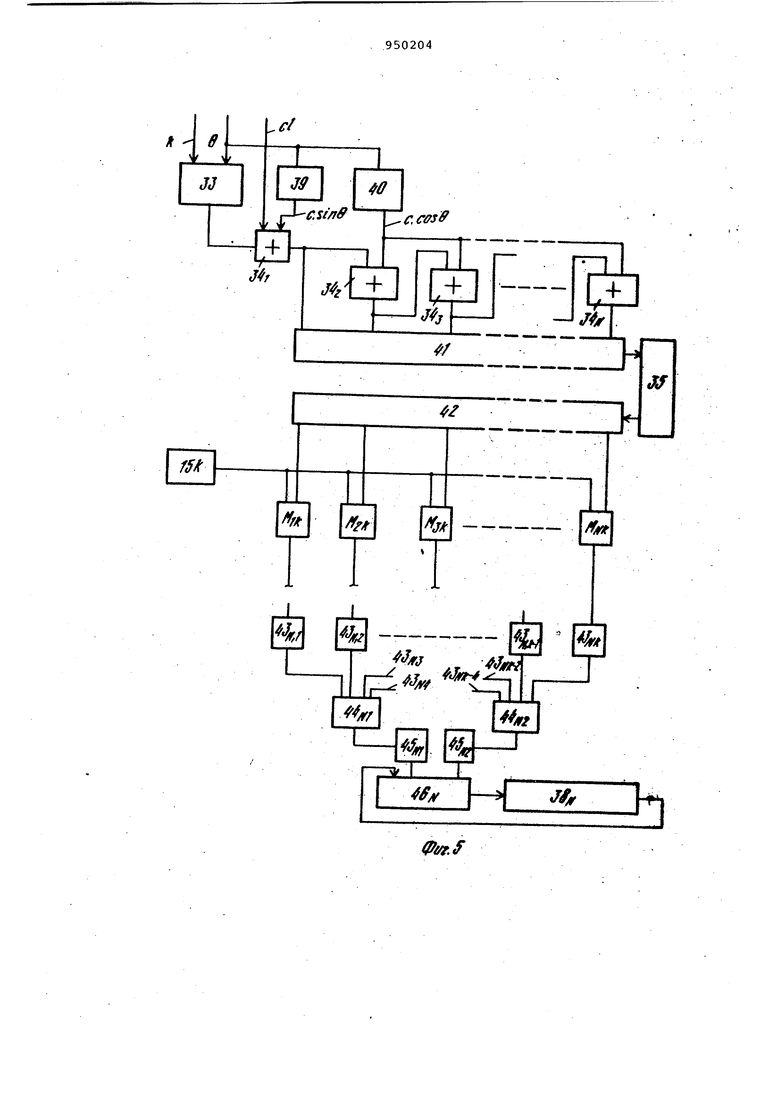
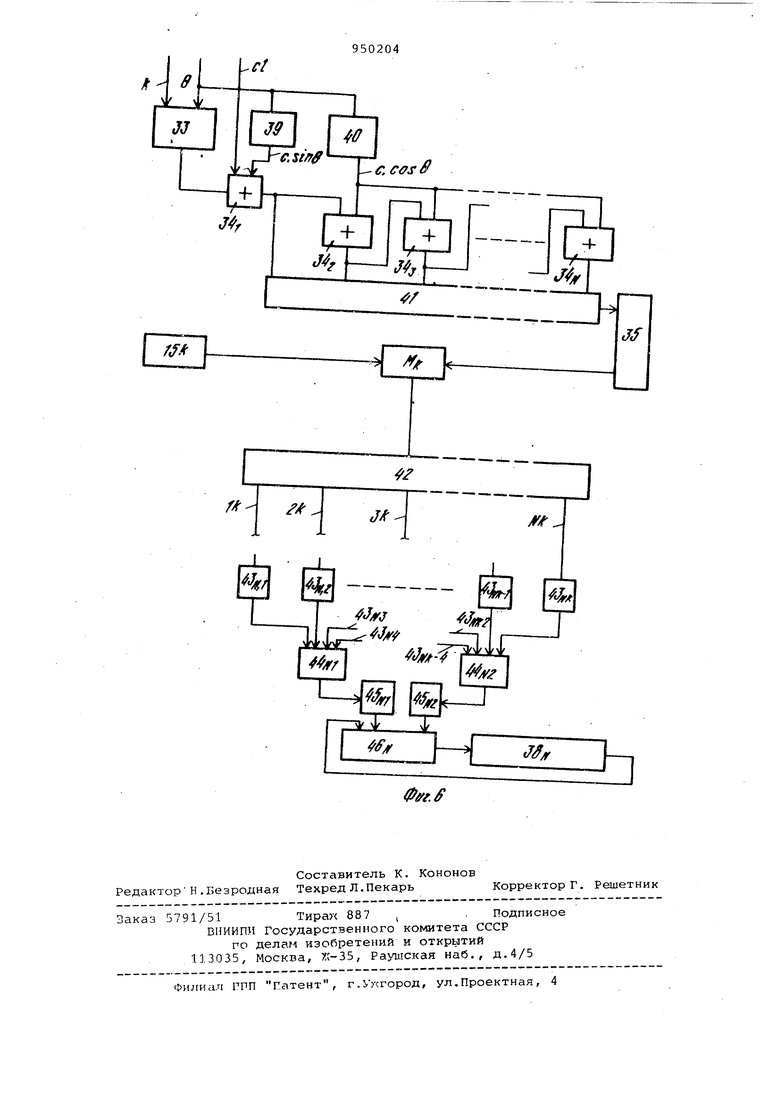
обработки запоминающего устройства на фиг. 5 - измененная блок-схема части устройства обработки и части запоминающего устройства в соответствии с фиг.4} на фиг. 6 - модификация блок-схемы части устройства обработки, показанной на фиг. 3.
Вычислительный томограф (фиг.1). содержит источник 1 излучения, который предпочтитель 1о выполнен в
виде .источника рентгеновского излучения, но в другом варианте может быть выполнен в виде радиоизотопного источника, например Ani-241. С помощью диафрагмы 2 излучение источника 1 коллимируется в плоский расходящийся пучок 3,толщина которого, составляет от 3 до 25 им, его угловое расхождение определяется углом ct. Пучок 3 излученияпадает
на набор 4 из отдельных детекторов 5, которые измеряют интенсивность излучения и выделяют элементарные пучки За излучения. Пирина и расстояние. между отдельными детекторами определяет пространственную точность, с которой осуществляют сканирование размещенного на столе 6 пациента 7. Набор 4 детекторов 5 расположен симметрично относительно центрального луча 8. Он включает, например, 300
детекторов, причем расстояние мехшу центрами двух детекторов 5 составляет несколько миллиметров. Набор, детекторов может быть выполнен также в виде длинной газонаполненной-ирнизационной камеры, в которой образующие отдельные зсны электроды расположены в ряд. Объект 7 может перемещаться перпендикулярно плоскости пучка 3 излучения вдоль продольной оси
9f расположенной внутри объекта 7, и центральной оси круглой опорной рамы 10 так, что могут облучаться различные слои объекта 7.
Система, образованная источником
1 излучения и набором 4 детекторов 5, установлена с возможностью поворота вокруг оси 9, в результате мего слой объекта 7 может быть облучен пучком 3 излучения по различным лежащим в плоскости слоя направлениям. Bpatjeние опорной рамы 10, в качестве направляющих для которой используют подшипники 11, осуществляется с помощью привода, состоящего из зубчатого
колеса 12 и двигателя 13. Вращение
опорной рамы 10 может производиться непрерывно или в шаговом режиме; в . последнем случае объект 7 просвечивается пучком 3 излучения после какдого
шага поворота рамы 10.
Сигналы измерения с детекторов 5 усиливаются в усилителе 14 н поступают на преобразователь 15 сигнгипов в котором сигналы корректируются известным образом с целью ког-шенсацин относятся к опорной величине, переводятся в цифровую форму, подвергаются логарифмированию и калибруются на основе таблиц логарифмирования и калибровки, введенных в преобразователь сигигшов. Измеренные величины в цифровом виде с выхода преобразователя 15 поступают на устройство 16 обработки.
Преобразователь 15 состоит из субпреобразователей, количество которых равно количеству детекторов, т.е. каждый детектор связан с отдельным субпреобразователем, причем последние работают параллельно. Цифровые измерения величины преобразуются с помощью устройства 16 обработки в величины поглощения, которые представляют в совокупности восстановленное изображение, хранящееся в запоминающем устройстве (ЗУ) 17. Рассчитанные величины поглощения могут быть выведены на дисплей, например манитор 18. Счетчик 19 служит для подсчета количества измеренных данных, поступивших на арифметическое устройство 16 обработки в течение каждой серии измерений. Когда количество поступивших даннЕйх становится равным количеству детекторов, схема 20 управления включает двигатель 13, который вызывает поворот опорной рамы 10. Затем осуществляется следующая серия измере1Шй и т.д. С помощью оптического датчика 21 определяется уг:ловой сдвиг б между последовательными сериями измерений путём подсчета количества переместившихся зубцов зубчатого колеса 12. Вырабатываемые оптическим датчиком 21 импульсы поступают на устройство 16 обработки, в результате чего координаты всех измерительных траекторий могут быть определены в совокупности с данными, oтнqcящимися к геометрической конструкции опорной рамы 10 и источника 1 с набором 4 детекторов 5 и закладываемыми в устройство16 обработки.
Было найдено, что расстояние между источником 1 излучения и объек-. том 7 должно быть адаптируег«лм к диаметру объекта 7. С этой целью источник 1 излучения и набор 4 детекторов 5 установлены на раме 22, которая может перемещаться по направляющим 23 на подшипниках 24 с помощью зубчатого привода 25, подключенного к двигателю 26. Схема 27 управления приводится в действие, например, с помощью ручного переключателя 28, но может работать и автоматически. Перед .началом измерений сигналы с
двух детекторов 5и 5 поступают на схему 27 управления через преобразователь 15 сигналов. Ргша 21 перемещается таким образом, чтобы сигнал детектора 5 был максимальным, а
сигнал детектора 5 имел несколько
меньшую величину, в этом случае детек тор 5 принимает не прсяиедшее через объект 7 излучение, тогда как измеренное детектором 5 излучение
ослаблено объектом 7. При этом схема 27 управления запирается для того, чтобы сохранить расстояние между источником 1 излучения и осью 9 поворота постоянным во время экспозиции;.
Определение вклада в элемент условно наложенной на объект 7 матрицы восстановления, имеющий координаты (г, Ч), от измеренной вдоль траектории с координатами (г,в) величины осьоцествляется следующим образом (фиг.2).
Известно, что распределение поглощения f(г, Ч) в плоскости с полярными координатами (г, ) мокет быть выражено в виде
4
fl. 1 S(rC6)- v r-cos(p-e)V.dr.«3e,(i)
О-оо
со
где (г) ||R|-expHJ7ir-R) (г)
-со
qfr ,0) - измеренные величины
поглощения излучения вдоль измерительных траекторий,
которые проходят на расстоянии г .от начала системы координат (г ,i|) и под углом 0, причем диапазон углов 6 равен 2 J/, а г изменяется от О до (для облегчения понимания фиг. 2 начало систегжл координат 9 вынесено из объекта 7).
Из формул 1(1) и (2)может быть рассчитан элементарный вклад измеренной величины {j(r,0) в величину поглощений элементом матрицы Е с координатами (г, V). Допуская, что ц(г
для {г , 0) и q (г , в ) 0 для всех остальных г и 9 вклад, обусловленный измеренной величиной q ( г , 0-г) может быть получен из (1) путем опускания интервалов
a4(r.iin,,e,),)((
Величина -cos (f-9)1 представляет собой расстояние между точкой (г, Ч) и измерительной траекторией, которая проходит через точку ( г , е,, ) и вдоль которой определено измеренное значение qCr.e). Функция- л(г) является симметричной функцией (см.формулу 2), т.е. g(d)q(-d). Весовые множители q(d) определяются с помощью
формулы (2), причем вычисляется интеграл в границах -Я„и +R, где R определено шириной измерительной траектории, вдоль которой определена измеренная величина. Если а - наиболшее расстояние между центрают двух параллельных измерительных траекторий R может Сыть выбрано равным 0,5 а. Из (2) далее следует, что
a/ vSiniMEl+HSiMlHhi (4)
IVW) гзга 4 Kjai ,
Таким образом, величина поглоце;ния в точке (r,«F ) может быть рас- считана из выражения
mtif. ll , , ... €lr.4J SIIl-IIIiAV(r,f-,ir,e),
(jj
в котором величина поглощения f{г,Ч) выражена как всех вкладов дМ, причем казкдый вклад равен произведению измеренной величины q (г ,0 ) на весовой множитель q(cl), в котором d представляет собой расстояние между точкой с координатами (г, f) и измерительной траекторией, проходящей через точку (-г в ) .
Представленная на фиг. 2 матрицы элементов g является слишком грубой для реального восстановления изображения. В действительности размер С квадратного элемента матрицу составляет 0,3-2 мм при поперечных размера сечения тела 30-50 см.
На фиг. 3 показана блок-схе уст ройства 16 обработки и ЗУ 17. Устройство 16 обработки содержит генератор весовых множителей 29, который включает адресный генератор 30 и память весовых множителей 31. Адресный генератор 30 содержит, например, генератор импульсов и два последовательно соединенных счетчика, состояния которых представляют координаты (х.у элементов Су условно наложенной на объект 7 матрицы (фиг.2, для кото- рых необходимо рассчитать вклады в величины поглощения.. Измеренные- величины q ( г ,9) , q(r,j, 0 ) , . . . ,q(r,0 С каждого субпреобразователя 15, ISij, ..., ISv поступают на схемы умножения М-, W.j,. . ., М, на KOTojMje также поступает весовой множитель q, относящийся к элементу E.JJ и углу в (определяемому по детектору 21 поло жения). Память весовых множителей 31 для повышения быстродействия разделена на k отдельных устройств памяти весовых множителей 31,31я.«. 31, которые работают параллельно и из которых отнесено к соответ ствующему детектору 5 , 5(j,. .. , 5f(. Выходы схем умножения ГЦ, М,... , М на которых одновременно появляются сигналы вкладов dVti,j , k,e) (i,j координаты элемента матрицы, k - номер детектора, в - угловое положение детектора), подключены к cybtMaтору 32, который суммирует все вкладаа и прибавляет сумму к величине поглощения, которая уже может присутствовать в элементее.; после предшествующих вычислений.
После того, как гщресный генератор 30 охватил все адреса (t,j) производится следующее измерение для следующего угла в .
Показанная на фиг. 4 часть предпочтительного варианта выполнения устройства обработки служит для обеспечения быстрой обработки измеренной величины, полученной с помощью детектора через субпреобразователь 15. Если число детекторов равно k, то показанная на фиг.4 часть устройства обработки имеется в нем k раз.
Указанная часть устройства обработки содержит память 33 расстояния, в которой расстояние может быть найдено в запомненной таблице на основе поступающих данных, например номера детектора k и угла 0 . Искол« е расстояние представляет собой расстояние от фиксированного элемента матрицы, например элемента €; .. Последующие расстояния между элементами строки или столбца матрицы определяются, как показано на фиг. 2, с помощью повторяющегося cy вдаpoвaния величин o-cosS и с . S i п е с расстоянием, найденши- с помощью памяти 33. Например, расстояние 1,( -с-созв) , расстояние 1 ( Ц-3-е-со5в 4- с.sine) и т.д.
Через первую схему 34 сложения расстояние поступает на первую память весовых множителел 35. и на вторую схему 34fj сложения. Внход последней подключен к второй памяти весовых множителей 351 и третьей схеме 34 3 слояюния. Указанный порядок подключения повторяется N раз, в результате чего на выходах схем сложения 34, 34ij,. .., 34 ( появляются расстояния для всех элементов е , первой строки матрицы (число элементов в строке матрицы равно N). Полученные расстояния поступают раздельно на устройства памяти весовых множителей 35, 35.,..., 35(/, на выходах которых появляютсй найденные на основе указанных расстояний (образующих адрес i для устройств памяти) весовые множители, поступаняцие на схемы умножения К, К,..., М|, на которые также поступает через субпреобразователь 15 измеренная детектором Ъц1 величина. Произведениея измеренной величины и соответствующих весовых множителей, полученные с помощью схем умножения М, .M«M..., , поступают на схемы су|имирования 36, ,. .. ,36f|. На эти cxei«i суммирования 36 , 36(1, ....,36к также поступают произведения . схем умножения идентичных паралле ЛЫ1О работающих частей устройства обработки (не показаны). Таким образом, для каждого детект ра k.одновременно вычисляется вклад df ДЛЯ каждого элемента в одной и той же строку матрицы. Все соответст вующие произведения, поступившие на входы схем 36 , Збг,, .. , Збщ суьадаруются и направляются на выходные схемы сложения 37, 37,,..., 37. Каждая выходная схема сложения 37. , 37(д подключена к одномерной памяти на сдвиговых регистрах ЗРц , Звг, . .. , 38. Содержание последнего запоминающего элемента каждой памяти 38 , 38г2,. . .., 38fg снова поступает на выходную схему сложения 37, ЗТ ..., 37f, так что вклада измеренных величин с каждого детектора, рассчитанные для элемента, могут быть прибавлены к ранее рассчитанным вкла дам в величины поглощения. Полученная таким путем сумма запоминается в первом элементе памяти после того, как все величины поглощ ния в памяти сдвинулись на одну яче ку памяти дальше. В калдой памяти на сдвиговых регистрах 38 ,38 ij,. . . , ЗВщ запоминаются величины поглощени элементов в столбце матрицы. По око чании предшествующей операции величина с-sine через блок 39 прибавляется по всем расстояниям в результа те поступления н.а схему сло хения 34 синхроимпульса с1, в результате чего на выходах схем сложения 34, 3Ai,... ,34ft появляются расстояния для элементов €ц следующей строки матрицы. Блок 40 служит для прибавления величины с-созб к расстоянию, поступающему на каждую из схем сложения , . . . , 34 |у( с предыдущей схемы сложения 34,, . .. , 34|si--i. .После получе ния расстояний для элементов следующей строки матрицы рассчитываются вклады для этих элементов описанным выше образом. Некоторые операции могут выполняться параллельно. Напри мер, во время расчета вкладов в схемах умножения М , . . . ,М|ц(уже могут рассчитываться расстояния для следующей серии параллельных вычислений. . В варианте выполнен ия части устройства обработки, показанном на фиг. 5, память весовых множителей по ключена к каждой схеме сложения 34), ...,34fs|. Для ограничения требуемого объема памяти выходы этих схем могут быть подключены к уплотнителю 41, выход которого- подключен к памяти 35 весовых множителей. Выход памяти 35 через разуплотнитель 42 соединен с входами схем умножения M.j, ,. -, Mf. Исключение (N-1) устройств памяти сопровождается несколько более медленной обработкой из-за ieo6xoдимости р;50оты памяти 35 весовых жителей в режиме временного уплотнения.I Показанная на фиг. 5 часть устройства обработки отличается от показанной на фиг. 4 другим выполнением устройства суммирования. В со-, ответствии с представленной на фиг.5 модификацией кажголй выход схем умножения Vlff, где 1 п М и 1# k К, подключен к независимому буферному ЗУ (на фиг. 5 показано только несколько буферных ЗУ для элемента с номером N) . Буферные ЗУ 4 3,;j|jразделены на группы, и на каждую группу введена первая схема суммирования 44j, 44|s|(2. Суммированные в пределах групп произведения запоминаются в промежуточных ЗУ 45f, 45Н(; которые подключены к схемам суг/ мирования 44..,, 44|tj,2. Выходы промежуточных ЗУ 4 5)4,2 подключены к второй схеме сложения 46|м, в которой осуществляется суммирование величин, приходящих с промежуточных ЗУ 45( . i KfjoMe того, выход памяти на сдвиговых регистрах 38(у) подключен к схеме сложения 46щ по причинам, описанным выше ссылкой на фиг.4. Использование буферных ЗУ 43 необходимо по той причине, что в противном случае требовалась бы синхронизация между уплотнителем 41 и разуплотнителем 42, с одной стороны, и схемами суммирования 44, с другой. Более того, количество входов на схему суг-пчирования 44i4 ограничено, в результате чего могут быть наложены менее жесткие требования с точки зрения скорости вычислений схем 44 cy лмиpoвания. Очевидно, что может быть найдено компромиссное решение между вариантами, показанными на фиг.4 и 5. Например, мржно использовать два или более параллельно работающих ynJjpTнителя.и разуплотнителя,входы и выходы которых связаны соответственно со схемами 34 сложения и умножителями М, которые разделены на группы. В показанной на фиг. б модификации выполнения части устройства обработки, приведенной на фиг. 5, выход памяти 35 весовых мно)хителей подключен к умножителю М,, с которым соединен также выход субпреобразователя 15Vf который вырабатывает измерен«ую величину, последовательные весовые множители, вырабатываемые памятью 35, поступают на умножитель Mj, а полученные произведения поступают на разуплотнитель 42. Распределенные по выходам , 2, .. . , N разуплотнителя 42 произведения поступают на буферные ЗУ 43 и далее обрабатываютря, как было описано выше. Уплотнитель 41 и разуплотнитель 42 должны быть синхронизированы надлеTKwauM образом. Между сигналами управления уплотнителем и разуплотнителем должна быть введена временная задержка,величина которой определяется скорость запирания памяти 35 и скоростью умножения умножителя М,. Показанный на фиг. 6 вариант имеет преимущество по сравнению с вариантом, показанным на фиг. 5, заключающееся в возможности исключе ния большого количества умножителей На каждую строку матрищл исключается (N-1) умножителей, но, с другой стороны, следует допустить-снижение скорости обработки данных, так как умножитель К будет узким местом с точки зрения прохождения потока данных, если только этот умножител не будет в N раз более быстродействующим, нежели умножитель М-., на .I г фиг. 5. Описанное выше устройство предназначено для восстановления двумерной картины распределения погложения излучения. Однако распредел ния поглощения может быть получено и для трехмерного пространства. Очевидно, что для получения однород ной плотности данных в распределени поглощения необходимо однородное ра пределение измерительных траекторий в исследуемой части объекта. Формула изобретения 1. Томографическое вычислительное устройство, содержащее по меньше мере один источник проникающего излучения, детекторное устройство по меньшей мере с одним детектором излучения для получения сигналов из мерения, раму-держатель источника и детекторного устройства, привод перемещения, по меньшей мере, источни для сканирования части тела пучком излучения, детектор положения для определения координат измерительной траектории, по которой проходит пучок излучения, устройство обработки для определения величин поглощения сигналам измерения, запоминающее ус ройство для запоминания величин пог щения и дисплей для индикации величин поглощения, отличающееся тем, что, с целью упрощения устройства обработки, последнее содержит генератор весовых множителей как функции координат элемента матрицы обработки, для которого рассчи Бается вклад в величину поглощения,и ординат измерительной-траектории,вдо которой получен сигнал измерения,при измерительной .траектории, вдоль которой получен сигнал измерения, при чем эти координаты поступают на генератор весовых множителей, по мень шей мере одну схему умножения для перемножения сигнала измерения и соответствующего весового множителя, которая подключена к генератору весовых множителей, и сумматор, который подключен к выходу схемы умножения и предназначен для суммирования рассчитанных на кахсдый элемент матрицы вкладов, причем выход этого cyNwaTopa подключен к запоминающему устройству. 2.Устройство по П.1, о т ли чающееся тем, что в случае выполнения детекторного устройства в виде набора смежно расположенных в пределах пучка излучения детекторов, генератор весовых множителей разбит на нескЬлько независи1Ф1Х субгенераторов, количество которых по меньшей мере равно количеству детекторов, причем на каждый субгенератор введена по меньшей- мере одна схема умножения. 3.Устройство по п.2, отличающееся тем, что каждый субгенератор содержит память весовых множителей и схему формирования адреса для поиска весового множителя в памяти по координатам траектории и элемента матрицы, к которому относится этот весовой множитель. 4.Устройство по п.2,о т л и чающееся тем, что каждый субгенератор содержит память весовых множителей, в которой запомнена таблица весовых множителей, адресом для которой служат координаты измерительной траектории и элемента матрицы . 5.Устройство по п.3, отличающееся тем, что схема формирования адреса содержит одну арифметическую схему для однократного определения для каждого сигнала измерения расстоякия между элементом матрицы и измерительной траекторией с целью формирования гщреса для памяти весовых множителей и схемы сложения для определения из найденного арифметической схемой расстояния остальных расстояний путем последовательного прибавления расстояния между центрами двух соседних элементов, умноженного на тригонометрическую функцию угла измерительной траекторией, соответствующей сигналу измерения, и системой координат матрицы. 6.Устройство по п.5, о т л и чающееся тем, что для какдой схемы формирования адреса введены несколько схем умножения и такое же количество схем слокения, которое равно количеству элементов в строке матрицы и которые отнесены к номерам элементов в строке, причем выходы схем сложения подключены через уплотнитель к памяти весовых множителей, выход которой через разуплотнитель подключен к последующим схемам умнолсения, поставленным в соответствие со схемой сложения, 7.Устройство по п,6, отличающееся тем, что уплотнитель , память весовых множителей и разуплотнитель разлелены по меньшей мере на две параллельно работающие Части, причем к каждой части подключена пропорциональная часть поставленных в соответствие схем сложе ния и схем умножения. 8.Устройство по пп. 6 и 7, о тличающееся тем, что выход всех схем умножения, отнесенных к одному и тому же номеру элемента матрицы, подключены к входу схемы суммирования, причем количество схе суммирования в сумматоре равно количеству элементов в строке матрицы выход этой схемы суммирования подключен через выходную схему сложения к одномерному запоглинакжаему пространству запоминажа его устройст ва для запоминания величин поглогдения для элементов столбца матрицы. 9.Устройство по п.8, отличающееся тем, что каждая сх ма суммирования разделена на первую и вторую схемы суммирования, причем пропорциональная часть выходов схем умножения подключена к первой схе ме суммирования, а выходы указанной первой схемы суг шрования подключены через промежуточную память с эапоминаквдей ячейкой к второй схеме суммирования, выход которой подключен к входу выходной схемы-сложения 10.Устройство по пп. 8 и 9, о т личающееся тем, что выход каждой схемы умножения подключен через буферную память с запоминающей ячейкой к входу схемы суммирова ния., 11.Устройство по пп.ё и 7, отличающееся тем, что выход всех схем умножения, отнесенных к одному и тому же номеру элемента. подключен к входу схеглл сулмирования, причем количество схем Сукмирования в сумматоре равно количестsy элементов в строке матрицы, шссод указанной схемл сумшрования подключен к одномерной памяти на сдвиговых регистрах эапоминаьэщего устройства, №лхоя которой подключен к другому входу схемы суммирования. 12, Устройство по п.5, отличаю щ е е с я тем, что для какдой схемы формирования адреса введена одна схема умножения и несколько схем сложения, количество которых равно количеству элементов в строке матрицы и которые отнесены к номерам элементов в указанной строке, причем схем сутожения подключены через схему умножения ч памяти весовых множителей, выход которой подключен к схеме y шoяитeля, подключенной к разуплотнителю, снабженному несколькими выходами, связанными со схемой сложения, причем все разуплотнители, отнесенные к одному и тому же номеру элемента матрицы, подключены к входам схемы суммирования/ количество яхем суммирования равно количеству Элементов в строке матрицы, а выход указанной схемл суммирования подключен через выходную схему сложения к одномерному запоминающему пространству устройства для запо.линания величин поглощения элементов в столбце матрищл. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № 1233S15, Н 5 R, опуСлик. 1972. 2, Заявка Франции № 2334964, кл. 6 01 Т 1/29, опублик. 1977. 3.Заявка Великобритании № 2003361, кл, G 01 N 23/06, опублик. 07,03,79. 4.аллож, заявка ФРГ № 2654065, кл. G 06 F 15/42, опублик. 1977 (прототип).
%/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦВЕТА И НЕЙРОКОЛОРИМЕТР ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2395063C1 |
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| Детектор излучения | 1990 |
|
SU1836750A3 |
| РЕНТГЕНОГРАФИЧЕСКИЙ СЕПАРАТОР МИНЕРАЛОВ | 2019 |
|
RU2715374C1 |
| Устройство приема телевизионного сигнала | 1988 |
|
SU1808173A3 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛОВ ИЗОБРАЖЕНИЯ В СИСТЕМАХ ЦИФРОВОГО ТЕЛЕВИДЕНИЯ СТАНДАРТНОЙ И ВЫСОКОЙ ЧЕТКОСТИ | 2013 |
|
RU2557261C2 |
| Устройство умножения булевых матриц | 1980 |
|
SU959063A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ОБЪЕКТОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2349937C1 |
| Устройство кодирования параметров элементов изображения и устройство декодирования параметров элементов изображения | 1987 |
|
SU1581230A3 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
fr,f}
fr fr 6
f.
ff.f У
(Гг,т)
I | Г-
|-Н «
яг./
