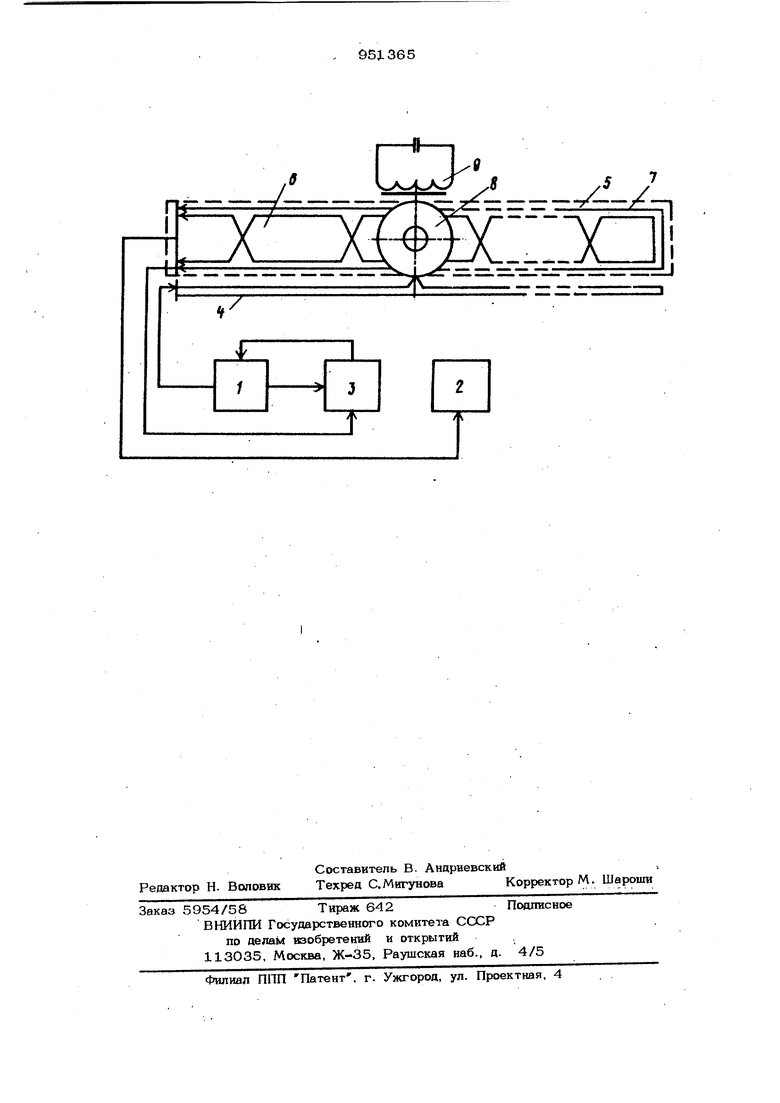
Изобретение относится к автоматизации управления передвижными механизмами и используется преимущественно в позишюнных системах программного и дистанционного управления промышленными манипуляторами, кранами, коксоввшги машинами. Известно устройство для приема и передачи и фор«|ации с поцвтокных объектов, содержащее приемную антенну, по/ ключенную через последовательно соедине ные детектор, пороговый элемент, делитель частоты и ключ Недостатком устройства является его сложность. Наиболее близким по техническому решению к изобретению является устройство для контроля положения переПвижных механизмов, содержащее генератор, nefvвым выходом соединенный с передающей антенной, приемную антенну с транспортированной линией, соединенной с входом блока индикации, и установленный на передвинсном механизме ролик, связанный с передающей антенной. В устройстве точность определяется крутизной переходной характеристики приемной антенны в окрестностях точек транспозиции двухпроводных линий, определяемой отношением приращения напряжения на выходе приемной антенны к приращению перемещения передвижного механизма 23Недостатком устройства является то, что ферромагнитный подъемный ролик не обеспечивает высокого уровня передачи сигнала из передающей антенны в приемную, что в свою очередь снижает крутиз- ну переходной характеристики, а, следовательно, и . точность устройства. Одновременно низкий уровень сигнала в прием.ной антенне снижает и помехоустойчивость устройства. Цель изобретения - повыщевие точности и помехоустойчивости устройства. Поставленная цель достигается тем, что в устройство ОЛЯ ко ггроля положения передвижных механизмов, содержащее г&нератор, выходом соединенный с передающей антенной, приемную антенну с транспонированной линией соединенной с входом блока индикации, и устано ленный на передвижном механизме ролик. связанный с передающей антенной, введен фазовый компаратор, колебательный конту в приемную антенну введена нетранспони- рованная линия, колебательный контур свя зан с роликом, который выполнен ферромагнитным, выход фазового компаратора подключен к входу генератора, второй вы« ход которого соединен с первым входом фазового компаратора, второй вход которого подключен к нетранспокированной линии приемной антенны. На чертеже представлена структурная схема устройства. Устройство для контроля положения передвижных механизмов содержит генератор 1 высокочастотных колебаний, блок 2 индикации положения передвижного механизма и фазовый компаратор 3. Вдол пути перемещения передвижного механи ма размещены: передающая 4 и приемная 5 антенны. Приемшя антенна состоит из транспонированных линий 6 и нетранспонированной линии 7 опорного сигнала и подключена к блоку 2 индикации положени механизма, причем линия 7 подключена также к входу фазового компаратора 3. На передвижном механизме размещены свободно вращающийся ферромагнитный ро лик 8, охваченный одной ветвью передаю щей антенны s 4 и колебательный контур 9, связанный посредством ферромагнитного ролика 8 с передающей антенной 4. Управляемый генератор 1 своим дополнительным выходом подключен К второму входу фазового компаратора 3, выход которого соединен с управляющим входом генератора 1. Устройство работает следующим образом. Колебания высокой частоты, возбуждаемые генератором 1, подаются в передающую антенну и излучаются в той же части, где ветвь антенны огибает фер ромагнитный ролик 8. 11ри этом колебательный контур 8, являющийся контуром последовательного резонанса, усиливает мощность, подводимую к излучающей части антенны 4. Усиленный сигнал преобра зуется приемной антенной 5 в пространст венный код, соответствующий положению механизма, котор тй поступает на вход бл ка 2 индикации положения передвижного механизма. Одновременно ст1гнал с нетранспонированной линии 7 опорного сигнала и с дополнительного выхода генераора 1 высокочастотных колебаний постуает на вход фазового компаратора 3, в оторс л происходит сравнение фаз колебаНИИ опорного сигнала с фазой колебаний генератора 1. Выходное напряжение ф1зового компаратора пропорционально сравниваемых аз и управляет частотой генератора 1 выокочастотных колебаний и при изменении араметров элементов колебательного контура 9 или генератора 1, вызванном, например температурным влиянием, подстраивает частоту генератора 1 под изменяк щуюся резонансную частоту контура 9. Введение в устройство нетранспон№рованной линии опорного сигнала, фазового компаратора и выполнение генератора высокочастотных колебаний управляемым выгодно отличает предлагаемое ус- ройство от прототипа, так как при этом по повыщается мощность попезногг- свтнала в антенне, что повыщает точность и пом хоустойчивость устройства. Формула изобретения Устройство для контроля положения передвижных механизмов, содержащее генератор, первым выходом соединенный с передающей антенной, приемную антенну с транспонированной линией, соедт ненной с входом блока индикации, и установленный на передвижном механизме ролик, связанный с передающей антенной, отличающееся тем, что, с целью иовыщения точности и помехоустойчивости устройства, в него введены фазовый компаратор, колебательный контур, в приемную антенну введена нетранспонированная линия, колебательный контур индуктивно связан с роликом, который выполнен ферромагнитным, выход фазового компаратора подключен к входу генератора, второй выход которого соединен с первым входом фазового компаратора, второй вход которого подключен к нетранспонированной линии приемной антенны. Источники информации, принятБ1е во внимание при экспертизе 1.Авторское свидетельство СССР № 70839О, кл. G 08 Q 1/О9, 1977. 2.Авторское свидетельство СССР № 455353 , кл. Q 08 Q 1/О9, 1973 (прототип).
.-/--/:
:::з(
| название | год | авторы | номер документа |
|---|---|---|---|
| АМПЛИТУДНО-ФАЗОВЫЙ СПОСОБ ОБНАРУЖЕНИЯ МЕТАЛЛОСОДЕРЖАЩИХ ОБЪЕКТОВ И РАДИОЧАСТОТНЫЙ ИЛИ СВЧ-МЕТАЛЛОДЕТЕКТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276391C2 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1999 |
|
RU2158016C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2132428C1 |
| Устройство для контроля положения передвижных механизмов | 1973 |
|
SU455353A1 |
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |
| СИСТЕМА РАДИОСВЯЗИ | 1993 |
|
RU2085039C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Система радиосвязи | 1986 |
|
SU1385305A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ НА БАЗЕ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ С ЧАСТОТНЫМ ВЫХОДОМ | 2011 |
|
RU2472182C1 |