Изобретение относится к телемеханике и может быть использовано для управления точной остановкой транспортного средства.
Цель изобретения - повышение точности устройства.
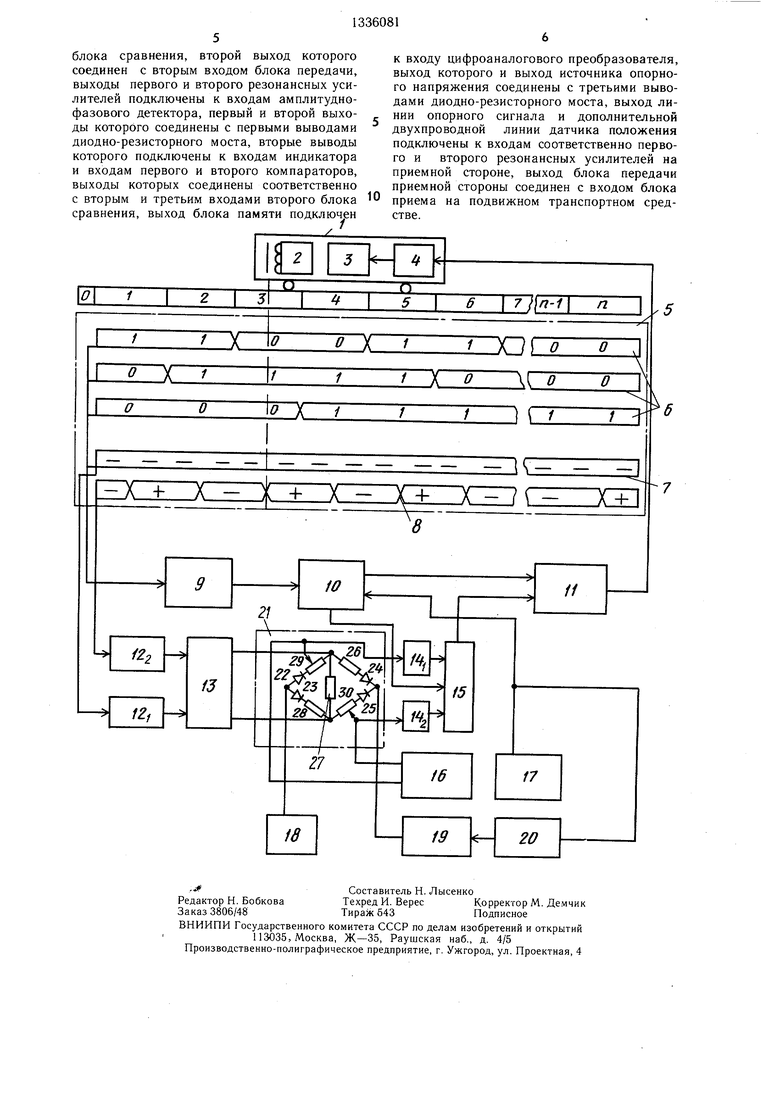
На чертеже представлена функциональная схема устройства.
Устройство содержит подвижный объект 1, высокочастотный генератор 2 с передающей антенной, исполнительный блок 3, блок 4 приема, датчик 5 положения, состоящий из двухпроводных линий 6 транспортированных в точках контроля, линии 7 опорного сигнала и дополнительной двухпроводной линии 8, перекрещивающейся в местах точной остановки, блок 9 определения местоположения, блок 10 сравнения, блок 11 передачи, резонансные усилители 12i и 122, амплитудно-фазовый детектор 13, компараторы 14 и 14д, блок 15 сравнения, индикатор 16, блок 17 задания кода положения, источник 18 опорного напряжения, цифро- аналоговый преобразователь 19, блок 20 памяти, диодно-резисторный мост 21, включающий в себя диоды 22-25, резисторы 26-28, переменные резисторы 29 и 30.
Устройство работает следующим образом.
Подвижный объект 1 с установленным на нем высокочастотным генератором 2 с передающей антенной может перемещаться под воздействием исполнительного блока 3 и блока 4 приема, также установленными на объекте вдоль технологического пути следования условно разбитого на п участков. Воспринимаемые блоком 4 приема сигнала управления передвижением команды преобразуются в команды перемещения «Вперед, «Назад, «Стоп и подаются на вход исполнительного блока 3.
Датчик 5 положения выполнен в виде нескольких двухпроводных линий 6, имеющих конфигурацию, соответствующую кодированию пути по участкам, и дополнительной двухпроводной линии 8, выполненной в виде двух двухпроводных линий, одна из которых имеет перекрещивания в местах точной остановки, при этом перекрещивания расположены внутри участков условного разбиения пути следования и линии 7 опорного сигнала.
Сигнал положения преобразуется блоком 9 определения местоположения в сигнал кода номера участка положения и подается на первый вход блока 10 сравнения.
Число двухпроводных линий 6 датчика 5 положения определяется .разрядностью двоичного числа N , где К - число разрядов, а конфигурация линий, соответствующая кодированию пути по участкам, выполнена в циклическом коде {например, в коде Грея). При фазовом способе различения кода положения в блоке 9 определения местоположения производится поразрядное сравнение фазы принятого сигнала с фазой опорного сигнала (опорный сигнал - в линии 7 без перекрещиваний).
При амплитудном способе кодирования
опорного сигнала не требуется, а конфигурация петель двухпроводных линий выполнена таким образом, что на участках с нулевым значением сигнала в каком-либо разряде ЭДС в такой линии не наводится. На
0 выходе блока 9 определения местоположения циклический код преобразуется в нормальный двоичный код положения подвижного объекта.
Код положения подвижного объекта, точ5 нее участка, облучаемого высокочастотным генератором 2 на подвижном объекте 1, подается на первый вход блока 10 сравнения, на второй вход которого поступает код задания от блока 17. Последний реализован набором кнопок с фиксацией и логической
0 схемой (набор инверторов), на выходе которой образуется код задания соответственно состоянием кнопок. Блок 10 сравнения представляет сумматор, включенный на вычитание, и логическую схему, определяющую со5 стояние сумматора. Выходными сигналами блока 10 сравнения являются сигналы «Равно (поступает на первый вход блока 15), «БОльще, «Меньше (поступают на второй вход блика 11 и транслируются (передаются) на вход блока 4 приема как команды
0 «Вперед или «Назад соответственно), и подвижный объект движется к заданному участку. При заезде подвижного объекта на заданный участок состояние сумматора в блоке 10 сравнения таково, что сигналы «Больще или «Меньще отсутствуют, а
5 присутствует сигнал «Равно, который разблокирует блок 15, который определяет состояние компараторов 14 и 14i. Выходным сигналом блока 15 являются сигналы «Недоезд, «Переезд, «Точно, которые под0 .ключены к первому входу блока 11 и транслируются (передаются) на вход блока приема как команды «Вперед или «Назад, или «Стоп соответственно, и подвижный объект перемещается до совмещения направления излучения передающей антенны и точки пе5 рекрещивания линии 8. В точке перекрещивания состояния компараторов 14) и 14г напряжения одинаково, а блок 15 вырабатывает сигнал «Стоп. Сигнал точной остановки селектируется резонансными усилителяQ МИ 12 и 12, затем подается на два входа амплитудно-фазового детектора 13 от линии 7 - опорный, от линии 8 - фазовый. Выходной ток в нагрузке амплитудно- фазового детектора 13 пропорционален удалению в путевом направлении передающей
5 антенны на подвижном объекте 1 от перекрестья, а полярность выходного тока соответствует относительному положению в путевом Направлении передающей антенны и
перекрестья. В момент нахождения передающей антенны на подвижном объекте 1 над перекрестьем выходной ток в нагрузке амплитудно-фазового детектора 13 равен нулю. Это верно без учета тока коррекции. Нагрузкой амплитудно-фазового детектора является резисторный мост 21. При нулевом токе амплитудно-фазового детектора 13 в резисторе 27 может протекать ток, диапазон изменений которого определяется диапазоном преобразований цифроаналогового преобразователя 19. Величины резисторов ди- одно-резисторного моста 21 выбраны таким образом, что при определенном числе на входе цифроаналогового преобразователя, являющимся примерно средним числом всего диапазона чисел преобразования, в резисторе 27, т. е. в диагонали моста, протекает начальный ток коррекции. При этом показания индикатора 16 (стрелочный прибор с нулевым значением в середине шкалы) равно нулю, а состояние ком-параторов 14} и 14 одинаковы. Рабочий диапазон изменений тока коррекции от минимального (в сторону уменьшения начального тока) до максимального (в сторону увеличения начального тока коррекции) меньще всего диапазона чисел преобразования цифроаналогового преобразователя 19. Во всем диапазоне токов коррекции диоды моста 21 находятся в проводящем состоянии. Ток амплитудно-фазового детектора 13 суммируется с током коррекции в резисторе 27.
При действительном точном положении подвижного объекта механизмы на объекте сопрягаются с механизмами, размещенными на пути следования. Допускаются отклонения от действительно точного положения в путевом направлении, при которых возможно гарантированное сопряжение механизмов. Допустимые отклонения остановки подвижного объекта от действительно точного положения соответствуют отклонениям выходного тока амплитудно-фазового детектора от нулевого значения, что соответствует зоне точной остановки.
В пределах зоны точной остановки компараторы 4i и 14 напряжения сохраняют одинаковое состояние. Использорание инструмента при размещении перекрестий в зоне точной остановки не дает возможности расположить перекрестье в действительно точном положении.
Учитывая, что выходная характеристика амплитудно-фазового дете.ктора 13 линейна в зоне, превыщающей зону точной остановки определение действительно точного положения возможно путем измерения выходной величины тока амплитудно-фазового детектора 13, пользуясь показаниями индикатора 16 при значении тока коррекций, равном начальному, при многократной остановке подвижного объекта 1 в зоне точной остановки. При этом должна быть отключена
связь между блоками 11 и 4, на входе цифроаналогового преобразователя 19, блоком 17 задания должен быть установлен адрес резервной ячейки, где записано в блоке 20
памяти число, соответствующее начальному току коррекции, а управление подвижным объектом на заданном участке должно осуществляться оператором. Среднее арифметическое значение величины показаний индикатора в единицах тока приближенно соответствует величине тока при действительном точном положении подвижного объекта и с увеличением числа остановок стремится к нему.
Среднее значение тока должно быть на
данном участке остановки скомпенсировано равным и противоположным по знаку током коррекции, что соответствует определенному числу на входе цифроаналогового преобразователя 19, которое должно быть записано по адресу номера участка, задаваемого бло
ко.м 17 задания.
Формула изобретения
0
5
Устройство управления подвижным тран5 спортным средством, содержащее на подвижном объекте высокочастотный генератор с передающей антенной, которая индуктивно связана с датчиком положения, выполненным в виде линии опорного сигнала и п двухпроводных линий, транспонированных в точках контроля, в соответствии с принятым законом кодирования на приемной стороне блок определения местоположения, первый компаратор, индикатор и первый блок сравнения, выходы п двухпроводных линий датчика положения соединены с входом блока определения местоположения, отличающееся тем, что, с целью повышения точности в него введены на подвижном транспортном средстве исполнительный блок и блок приема, выход которого соединен с
0 входом исполнительного блока, в датчик положения введена дополнительная двухпроводная линия, перекрещивающая в местах точкой остановки, при этом перекрещивание располагается внутри участков между точками контроля п двухпроводных линий, на приемной стороне введены первый и второй резонансные усилители, амплитудно-фазовый детектор, второй блок сравнения, блок передачи, блок задания кода положения, второй компаратор, источник опорного
0 напряжения, диодно-резисторный мост, циф- роаналоговый преобразователь и блок памяти, выход блока определения местоположения соединен с первым входом первого блока сравнения, первый выход которого подключен к первому входу второго блока
5 сравнения, выход которого соединен с первым входом блока передачи, выход блока задания кода положения подключен к входу блока памяти и к второму входу первого
блока сравнения, второй выход которого соединен с вторым входом блока передачи, выходы первого и второго резонансных усилителей подключены к входам амплитудно- фазового детектора, первый и второй выхо- ды которого соединены с первыми выводами диодно-резисторного моста, вторые выводы которого подключены к входам индикатора и входам первого и второго компараторов, выходы которых соединены соответственно с вторым и третьим входами второго блока сравнения, выход блока памяти подключен
к входу цифроаналогового преобразователя, выход которого и выход источника опорного напряжения соединены с третьими выводами диодно-резисторного моста, выход линии опорного сигнала и дополнительной двухпроводной линии датчика положения подключены к входам соответственно первого и второго резонансных усилителей на приемной стороне, выход блока передачи приемной стороны соединен с входом блока приема на подвижном транспортном средстве.
.jfСоставитель Н. Лысенко
Редактор Н. БобковаТехред И. ВересКорректор М. Демчик
Заказ 3806/48Тираж 643Подписное
ВНИИПИ Государственного комитета СССР по делам изобретеннй и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля направления движения подвижного механизма | 1976 |
|
SU649011A1 |
| Устройство для геоэлектроразведки | 1990 |
|
SU1742763A1 |
| ТЕХНОЛОГИЯ ОПРЕДЕЛЕНИЯ ВЕЩЕЙ | 2010 |
|
RU2453003C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2256937C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| КОГЕРЕНТНЫЙ ПРИЕМООТВЕТЧИК ФАЗОВОЙ СИНХРОНИЗАЦИИ | 2006 |
|
RU2319931C1 |
| ЦЕЗИЕВЫЙ СТАНДАРТ ЧАСТОТЫ | 1994 |
|
RU2076411C1 |
| Устройство для многоканальной магнитной записи и воспроизведения сигналов с коррекцией временных искажений | 1990 |
|
SU1777178A1 |
| Дифференциальная система с автоматической балансировкой | 1985 |
|
SU1277404A1 |
Изобретение относится к области телемеханики и может быть использовано для управления точной остановкой транспортных средств. Цель изобретения - повышение точности устройства. Код положения подвижного объекта подается на первый вход первого блока сравнения, в котором он сравнивается с кодом установки. При совпадении кодов первый блок сравнения вырабатывает сигнал «Равно, который разблокирует второй блок сравнения. Этот блок определяет состояние первого и второго компараторов, включая таким образом канал точной остановки подвижного объекта. В случае точной остановки объекта состояние компараторов одинаково, и формируется сигнал «Стоп. 1 ил. со со 05
| УСТРОЙСТВО для КОНТРОЛЯ ПОЛОЖЕНИЯ ПЕРЕДВИЖНЫХ МЕХАНИЗМОВ | 0 |
|
SU222203A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Авторское свидетельство СССР № 758225, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
