(5) РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тиристорным электроприводом | 1981 |
|
SU1056413A1 |
| Реверсивный тиристорный электроприводпОСТОяННОгО TOKA | 1979 |
|
SU824393A1 |
| Реверсивный тиристорный преобразователь | 1980 |
|
SU900384A1 |
| Электропривод постоянного тока | 1981 |
|
SU945944A1 |
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2020717C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТИРИСТОРАМИ | 1973 |
|
SU399980A1 |
1
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу постоянного тока, и может быть использовано в электроприводах подач металлорежущих станково
Известен реверсивный тиристорный электропривод постоянного тока, содержащий последовательно соединенные задатчик скорости, блок сравнения, интегральный усилитель, два канала управления, каждый из которых содержит нереверсивный полупроводниковый усилитель, систему импульснофазового управления, выпрямитель в цепи обратной связи по току и регулятор уравнительного тока, силовой управляемый выпрямитель с согласованным управлением катодной и анод ной групп тиристоров, подключенный к источнику питания с повышенной частотой напряжения, на выходе силового управляемого выпрямителя включены два ограничивающих уравнительный ток
дросселя, между точкой соединения которых и нулем силового управляемого выпрямителя включен электродвигатель с тахогенератором 1,
В таком реверсивном тиристориом электроприводе постоянного тока для повышения быстродействия используется сеть повышенной частоты. Нреобразоваиие промышленной энергии в Энергию повышенной частоты связано
10 с определенными трудностями и снижением в целом технико-экономических, показателей, а также значительным увеличением массогабаритных показателей. Кроме того, при максимальных
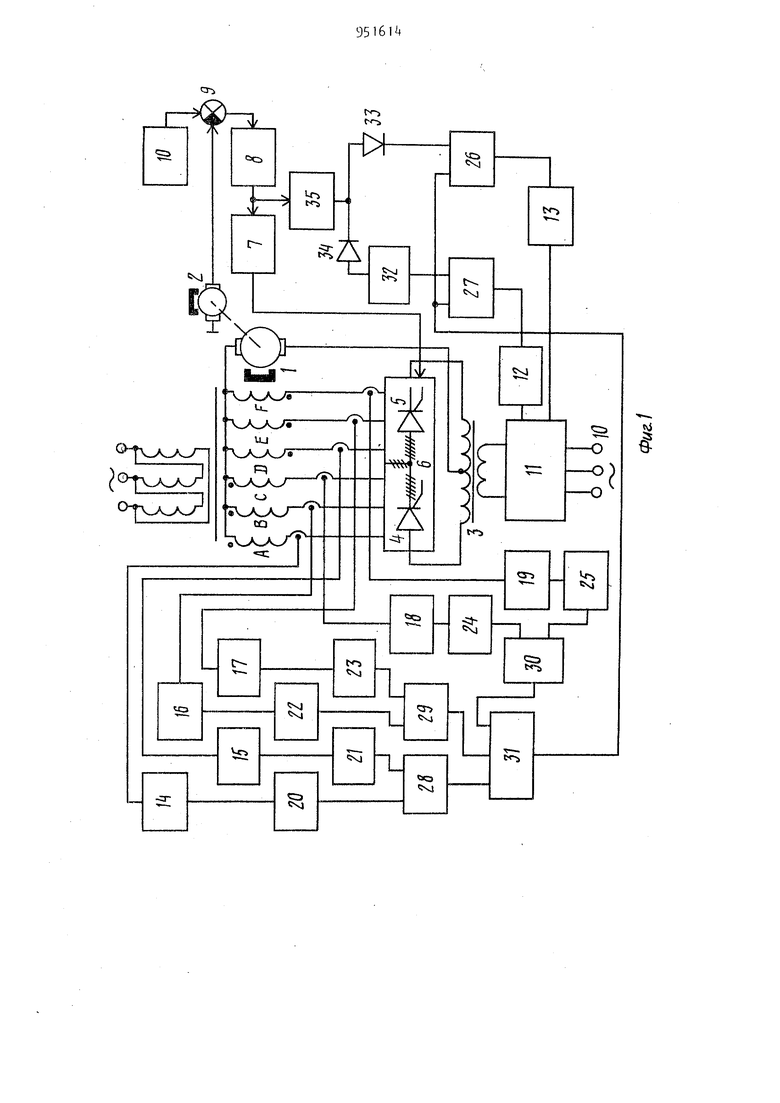
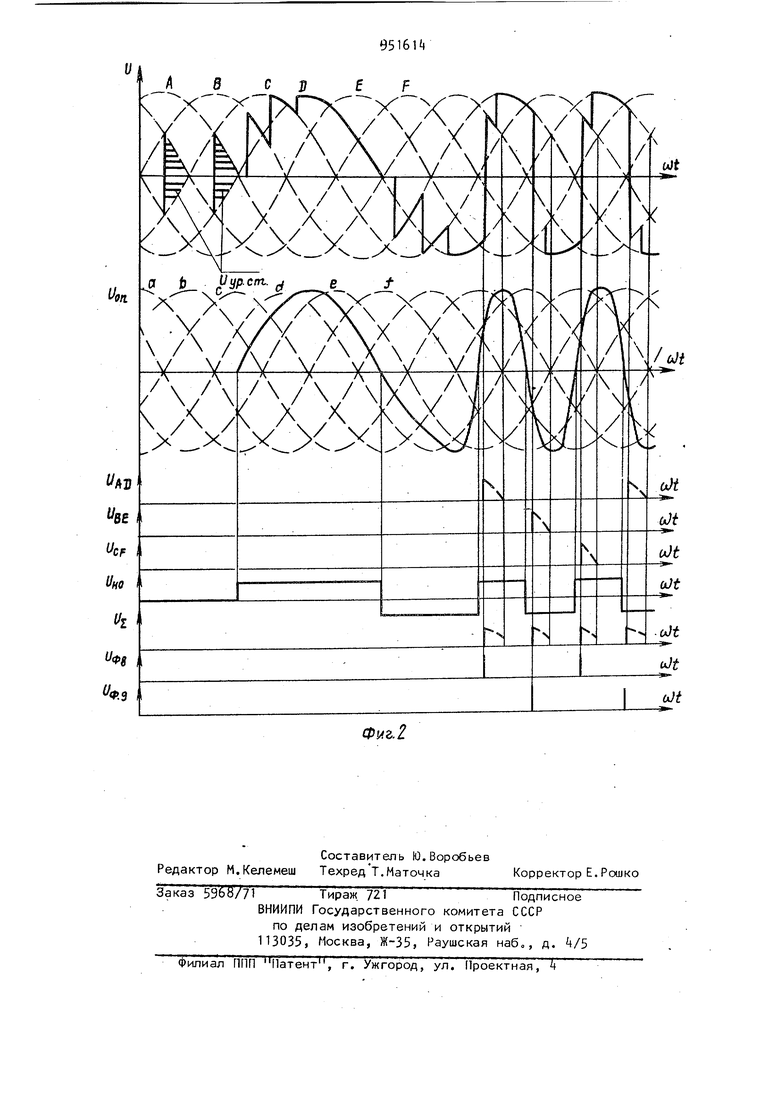
15 по модулю значениях управляюсцего напряжения невозможно получить выходной сигнал без амплитудных искажений при частоте, превышающей частоту сетевого напряжения о При ча20стоте входного сигнала {при максимальной амплитуде), превышающей частоту сетевого напряжения, возрастает величина динамического урав3нительного тока, что приводит к значительной потере энергии, к снижению коэффициента полезного действия реверсивного тиристорного электропривода постоянного тока в целом. Возникновение динамического уравнительного тока загружает тиристоры преобразователя и может возникнуть аварийный режим, что приводит к отключению от сети переменного тока ре версивного тиристорного электропривода постоянного тока о Наиболее близким по технической сущности к изобретению является реверсивный тиристорный электропривод постоянного тока, содержащий эле тродвигатель с тахогене атором, подключенный через основную обмотку дро селя к анодной и катодной группам ти ристорного преобразовате41я, вход которого через блок импульсно-фазового управления соединен с выходом интегрального усилителя, вход которого со единен с выходом блока сравнения, один вход которого соединен с задатчиком скорости, а второй - с тахогенератором, дополнительная обмотка дросселя через блок коммутации соединена с двумя формирователями pj . Однако в данном реверсивном тири&торном электроприводе постоянного тока используются фиксированные неизменяемые параметры настроек (блок зоны нечувствительности), что приводит к значительным погрешностям в управлении и снижению быстродействия а также к увеличению вероятности возникновения аварийного режима. Цель изобретения - повышение надежности и ТОЧНОСТИ регулирования частоты вращения электропривода. Поставленная цель достигается тем, что в -реверсивный тиристорный электропривод постоянного тока допол нительно-введены шесть датчиков тока фазы, шесть блоков модуля с зоной нечувствительности пять схем совпадения, сумматор, инвертор, два диода, нуль-орган, вход которого соединен с выходом интегрального усилителя, а выход через один согласно вклю ченный диод соединен с одним входом первой схемы совпадения, а через вто рой встречно включенный диод и инвер тор - с одним входом второй схемы совпадения, выходы первой и второй схем совпадения соединены с входами формирователей, вторые входы первой 144 и второй схем совпадения соединены с выходом сумматора, входы которого соединены с выходами третьей, четвертой и пятой схем совпадения, входы которых через блоки модулей с зоной нечувствительности соер,инены с датчиками- тока фаз. На фиг. 1 приведена блок-схема предлагаемого реверсивного тиристорного электропривода постоянного тока; на фиг. 2 - идеализированные временные диаграммы его работы Реверсивный тиристорный электропривод постоянного тока (фиго 1) содержит электродвигатель 1 с тахогенератором 2, подключенный через основную обмотку дросселя 3 к анодной и катодной 5 группам тиристоров тиристорного преобразователя 6, вход которого через блок 7 импульсно-фазового управления соединен с выходом интегрального усилителя 8, вход которого соединен с выходом блока 9 сравнения, один вход которого соедипен с задатчиком 10 скорости, а второй - с тахогенератором 2, дополнительная обмотка дросселя 3 через блок 11коммутации соединена с двумя формирователями 12 и 13, шесть датчиков тока фаз, шесть блоков 20-25 модуля с зоной нечувствительности, пять схем 26-30 совпадения, сумматор 31, инвертор 32, два диода 33 и 3, нуль-орган 35, вход которого соединен с выходом интегрального усилителя 8, а выход через один согласно включенный диод 33 соединен с одним входом схемы 26 совпадения, а через встречно включенный диод 3 и инвертор 32 - с одним входом схемы 27 совпадения, выходы схем 26 и 27 соединены со входами формирователей 12и 13, вторые входы схем 26 и 27 соединены с выходом сумматора 31 входы которого соединены с выходами схем 28-30 совпадения, входы которых через блоки 20-25 соединены с датчиками Й-19 токов фаз. Реверсивный тиристорный электропривод постоянного тока работает следующим образом Электропривод имеет триххарактерные режима работы Первый режим характеризует рзботу силового управляемого преобразователя при малой амплитуде входного сигнала управления, когда реверсивный тиристорный электропривод постоянного тока с малоинерционным электродвигателем может пропускать частоту входного сигнала вплоть до граничной частоты, определяемой по теореме Котельникова о тцур где ш- фазнооть преобразователя. Второй режим характеризует работу силового управляемого преобразователя при большой амплитуде по модулю входного сигнала .управления, но со скоростью его изменения, не превышающей критическую, равную частоте сети и определяемую по выражению ) , сигнал управления на входе преобразователя, Третий режим характеризует работу силового управляемого выпрямителя при большой амплитуде входного сигнала управления по модулю, когда реверсивный тиристорный.электроп вод постоянного тока пропускает частоту входного сигнала, превышающую частоту сети с выполнением неравенства у . ( При подаче задатчиком 10 скорост сигнала управления с малой амплитудой (первый режим) происходит сравнение его в блоке 9 сравнения с CHI- налом отрицательной обратной связи, снимаемого с тахогенератора 2. Сиг.нал ошибки, снимаемый с блока 3 сра нения, усиливается интегральным уси лителем 8 и поступает на блок 7 импульсногфазового управления. С выхо да блока в зависимости от полярности сигнала управления, снижаемого с интегрального усилителя 8, поступают импульсы управления на вклю чение силового управляемого преобра зователя тела 6 на положительную или отрицательную полярность выпрям ленного напряжения (фиг. 2) для пер вого режима, когда При работе силового управляемого преобразователя 6 на его выходе появляется уравнительный ток, протекающий через основную обмотку со средней точкой Дросселя 3 и имеющий направление от катодной группы 5 к анодной группе тиристоров, при этом через одну из половин основной обмотки дросселя 3 (в зависимости от полярности выпрямленного напряжени;. протекает ток якорной цепи электро двигателя. С валом электродвигателя 1 жестко связан вал тахогенератора 2, выходной сигнал которого сравнивается с заданным сигналом задатчика 10 в блоке 9 сравнения, чем обеспечивается автоматическое отслеживание заданной частоты вращения. При подаче задатчиком 10 скорости сигнала управления с большой амплитудой (второй режим), но со скоростью изменения, равной частоте сети, реверсивный тиристорный электропривод постоянного тока работает по ранее описанной схеме, а выпрямленное напряжение реверсируется по отрезку синусоиды напряжения, прикладыЕЗаемого к цепи нагрузки, подключенной последней фазой питающего напряжения. Осциллограмма реверса выпрямленного напряжения при этом показана на фиг 2 для Uj,ia:( При скорости изиенения управляющего сигнала U- с (5ольшой амплитудой (фиго 2 для Uj,,,а-) в третьем режиме работы , превышающей критическую скорость изменения управляющего сигнала, определяемого по вьцзажению (2 ), вступают дополнительно гл работу датчики тока фаз, под--, соединенные к ним блоки 20-25 моду лей с зонами нечувствительностей на входах, причем сигналы с выходов блоков 2Q--25 попарно противоположных фаз поступают на входы схем 28-30 совпадения. На временной диаграмме (фиг. 2) изображены выходные импульсы схем 28 (29 и) 30 (на входы которых поступают сигналы с датчиков 14 19 ков фаз и блоков 20-25 модулей с зонами нечувствительностей на входах) штриховой линией для пояснения работы указанных блоков (когда блок 11 коммутации отключен). Выходные сиг налы схем 28-30 совпадения поступают далее на сумматор 31. Выходной сигнал интегрального усилителя 8 поступает на вход нуль-органа 35. выходной сигнал которого на положительную полярность поступает через первый диод 33, включенный в проводящем направлении, на первый вход схемы 2б совпадения. Выходной сигнал нуль-органа 35 на отрицательную полярность поступает через обратно включенный диод 3 и инвертор 32 на 7 первый вход другой схемы совпадения 27. На вторые входы схем 26 и 2 совпадения поступает сигнал с выхода сумматора 31. В зависимости от полярности сигнала управления, сни маемого с интегрального усилителя 8, одна из схем 26 или 27 совпадения пропускает сигнал через соответ ствующие формирователи импульсов 12 и 13,на входы нереверсивного блока 11 коммутации, который вырабатывает мощный импульс в дополнительную обмотку дросселя 3. Мсицный импульс из дополнительной обмотки трансформируется в основную обмотку дросселя 3 и кратковременно обеспечивает преобразователь 6, чем и осуществля ется отключение отработавшей группы тиристоров от сетевого напряжения. Дроссель 3 выполнен таким, образом, что намагничивающий ток нагрузки, протекающий по одной из половин основной обмотки дросселя 3, имеет всегда одно направление ( например с начала -на конец полуобмоток основной обмотки ) и позволяет блок 11 коммутации выполнить нереверсивным. Блоки 20-25 модулей выполнены с зонами нечувствительно стей на входах для того, чтобы сигналы не проходили на выход при работе преобразователя 6 в статическом режиме, т.е. когда не нарушается условие работы преобразователя 6 с естественной коммутацией вентилей, определяемое по выражению (2). Идеализированные временные диаграммы работы преобразователя 6, интеграль ного усилителя 8 (сигнал Uvjf выход ные сигналы схем 28--30 совпадения уравнительной ЗДС противоположных фаз АД, BE, CF вырабатываются датчиками , соединенными с блоками 20-25 модулей, и схемами 28-30 совпадения токов в противоположных фазах нуль-органом 35, сумматором 31 и формирователями импульсов 12 и 13. Рассмотрим работу тиристорного преобразователя 6, когда одна из групп тиристоров, например катодная 5, работает в выпрямительном, а анодная А в инверторном режимах. В этом случае выпрямленный ток якорно цепи электродвигателя 1 протекает п цепи вторичная обмотка силового тра форматора - катодная группа 5 тирис торов - дроссель 3 - якорная цепь электродвигателя 1 - ноль трансформ 8 тора. При реверсе (изменении знака) сигнала управления большой амплитуды с производной, превышающей критическую (фиг. 2 третий режим), вступают дополнительно в работу датчики Й-19 тока фаз, блоки 20-25 моду ля с зрной нечувствительности на входах, сигналы с выходов которых попарно противоположных фаз поступают на входы схем 28-30 совпадения. формирующих сигналы, сдидетельствующие о возникновении динамического уравнительного тока, суммирование которых осуществляется в сумматоре 31. Кроме того, выходной сигнал интегрально го усилителя 8 поступает на вход- нуль-органа 35, выходной сигнал его на положительную полярность поступает через диод 33 включений в проводящем направлении на один из входов схемы 26 совпадения, а выходной сигнал на отрицательную полярность через обратно включенный диод 3 и инвертор 32 поступает на один из входов другой схемы 27 совпадения, причем на другие входы схем совпадения 26 и 27 поступает сигнал от сумматора 31. При совпадении сигналов на одной из схем совпадения 26 (или 27) на выходе (фиг. 2) ее появляется сигнал, поступающий через формирователь импульсов 12 (или 13 блока 11 коммутации. При поступлении на один из входов блока 11 сигнала в нем вырабатывается мощный импульс, который, через дополнительную обмотку трансформируется в основную обмотку дросселя 3 и кратковременно обесточивает преобразователь 6, чем и обеспечивается отключение его от сетевого напряжения. Такое управление преобразователем 6 электропривода позволяет устранить появление длительно действующей динамической ЭДС в уравнительном контуре, снизить потери преобразователя, а устранение паузы напряжения преобразователя, прикладываемого к якорной цепи электродвигателя, позволяет повысить быстродействие всего электропривода Напряжение преобразователя 6 в этом режиме работы приведено сплошной линией на фиГо 2 для третьего режима работы электропривода. На фиг. 2 изображены также временные диаграммы работы основных блоков реверсивного тиристорного элекТропривода постоянного тока. 9 Выполнение блоков 20-25 модулей с зонами нечувствительностей на входах необходимо для исключения работы блока 11 коммутации в статических режимах (когда в уравнительном конту ре протекает статический уравнительный ток), а зона нечувствительности настраивается на исключение прохождения сигналов от статических уравнительных ЭДС преобразователя 6. В результате постоянного слежения за появлением динамического урав нительного тока, фактически зависящего как от частоты, так и от амплитуды входного сигнала, вырабатываемо го интегральным усилителем 8, в замкнутом электроприводе удается увеличить точность регулирования преобразователем 6 электропривода, что очень важно как для увеличения динаМИКИ, коэффициента полезного действия, а также безаварийной работы все го реверсивного тиристорного электро привода, т.е. повышения его надежности. Формула изобретения Реверсивный тиристорный электропривод постоянного тока, содержащий электродвигатель с тахогенератором, подключенный через основную обмотку дросселя к анодной и катодной группам тиристорного преобразователя, вход которого через блок импульснофазового управления соединен с выходом интегрального усилителя, вход которого соединен с выходом блока 1 ...10 сравнения, один вход которого соединен с задатчиком скорости, а второй - с тахогенератором, дополнительная обмотка дросселя через блок коммутации соединена с двумя формирователями, отличающийс я тем, что, с целью повышения надежности и точности регулирования частоты вращения, в него дополнитель но введены шесть датчиков тока фазы, шесть блоков модуля с зоной нечувствительности, пять схем совпадения, сумматор, инвертор, два диода, нульорган, вход которого соединен с выходом интегрального усилителя, а выход через один согласно включенный диод соединен с одним входом первой схемы совпадения, а через второй встречно включенный диод и инверторс одним входом второй схемы .совпадения, выходы первой и второй схем совпадения соединены с входами формирователей, вторые входы первой и второй схем совпадения соединемы с выходом сумматора, входы которого соединены с выходами третьей чет вер той и пятой схем совпадения, входу которых через блоки модулей с зонаЧ нечувствительности соединены с датчиками тока фаз . Источники информации, принятые во внимание при экспертизе 1.Труды У1 Всесоюзной конферен-, ции по автоматизированному электроприводу. М., Энергия, 197, с. 290, 2.Авторское свидетельство СССР по заявке ff 2792562/2 -0, 02 Р 5/06, 1979.
TXA
O-fVA J
.2
