(54) РЕВЕРСИВНЫЙ ТИРИСТОРНБШ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Реверсивный тиристорный преобразователь | 1980 |
|
SU900384A1 |
| Реверсивный электропривод постоянного тока | 1982 |
|
SU1046889A1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| СПОСОБ УПРАВЛЕНИЯ ТИРИСТОРАМИ В РЕВЕРСИВНОМ ТРЕХФАЗНОМ ТИРИСТОРНОМ ЭЛЕКТРОПРИВОДЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2498493C2 |
| Способ управления тиристорным электроприводом | 1981 |
|
SU1056413A1 |
| Реверсивный электропривод | 1977 |
|
SU739700A1 |
| Электропривод переменного тока | 1989 |
|
SU1781807A1 |
| УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО ПУСКА И РЕГУЛИРОВАНИЯ СКОРОСТИ ВЫСОКОВОЛЬТНОГО СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2497268C1 |
| Вентильный электродвигатель | 1977 |
|
SU686125A2 |
Изобретение относится к электротехнике и может быть использовано в приводах подач металлорежущих станков.
Известен реверсивный тиристорный электропривод постоянного тока, содержащий электродвигатель, подключенный через дроссель к анодной и катодной группам тиристоров с блоками коммутаций преобразователя с раздельным управлением груцп, последовательно соединенные систему импульснофазового управления, интегральный усилитель, узел сравнения и задатчик скорости 1.
Однако известные электроприводы имеют пониженное быстродействие, обусловленное тем, что реверс тока в цепи нагрузки осуществляется с временной задержкой, вводимой для устранения возможности короткого замыкания при одновременном включении тиристоров разных групп, а также нелинейные механические характеристики, обусловленные зоной прерывистых токов, что ухудщает в конечном итоге статические и динамические характеристики электропривода, особенно в зоне малых скоростей и нагрузок.
Наиболее близким к предлагаемому по технической сущности является реверсивный
тиристорный электропривод постоянного тока, содержащий электродвигатель, подключенный через дроссели к анодной и катодной группам тиристоров тиристорного преобразователя, последовательно соединенные блоки коммутации, выход одного из них подключен ко входу тиристорного преобразователя, последовательно соединенные систему импульсно-фазового управления, интегральный усилитель, узел сравнения и задатчик скорости. Для повыщения быстродействия . используется сеть повь1щенной частоты 2.
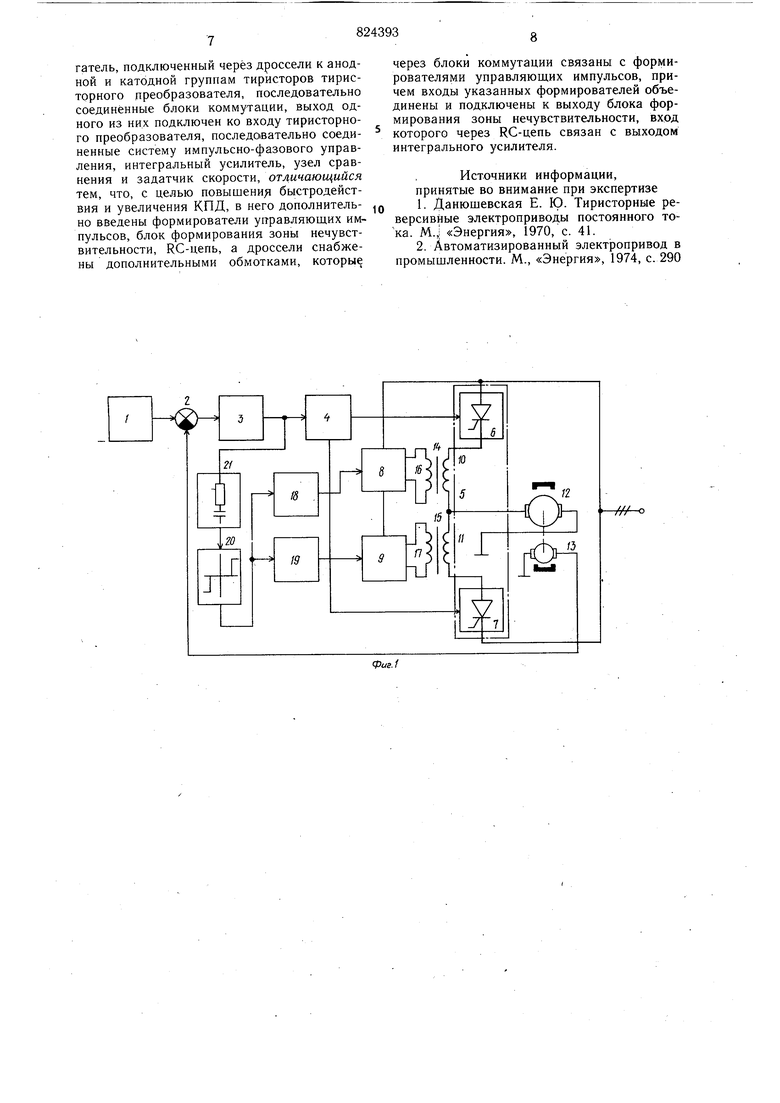
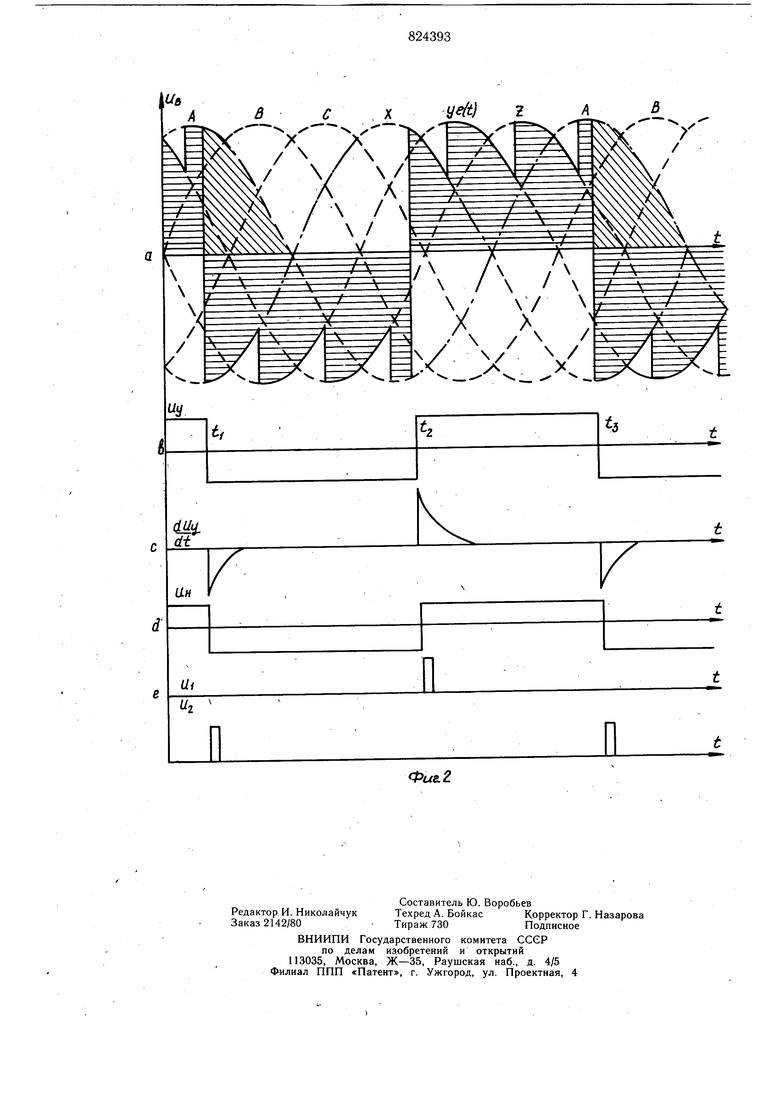
Однако преобразование промышленной энергии в э.нергйю повыщенной частоты связано с определенными трудностями и снижением в целом технико-экономиче.ских показателей, а также значительным увеличением массогабаритных показателей. Кроме того, при максимальных по модулю значениях управляющего напряжения проявляется одна из особенностей силового управляемого выпрямителя в реверсивном тиристорном электроприводе, заключающаяся в мгновенном открывании тиристора при подаче управляющего импульса, в запирании при значениях тока тиристора меньше тока «удержания. При значениях производной управляющего сигнала, превышающих критическую величину, равную круговой частоте питающего напряжения dt Чрн-r ) процессы в преобразователе при увеличении и уменьшении сигнала управления оказываются разными. При значениях производной управляющего .сигнала, превышающей критическую, коммутация вентилей отсутствует, а ЭДС преобразователя e(t) перестает определяться законом oL(t) и представляет собой отрезок синусоидального анодного напряжения того тиристора, который включен последним. Указанные особенности работы реверсивного тиристорного электропривода постоянного тока с силовым управляемым выпрямителем с согласованным управлением групп тиристоров не позволяет получить высокого быстродействия при больших сигналах управления, ограничиваемого особенностями силового управляемого выпрямителя. При частоте входного сигнала, равного или превышающего критическую частоту, определяемую по выражению (, резко возрастает величина динамического уравнительного тока, что приводит к значительной потери энергии и к снижению КПД реверсивного тиристорного электропривода постоянного тока в целом. Цель изобретения - повышение быстродействия и увеличение КПД. Поставленная цель достигается тем, что в реверсивный тиристорный электропривод постоянного тока дополнительно введены формирователи управляющих импульсов, блок формирования зоны нечувствительности, RC-цепь, а дроссели снабжены дополнительными обмотками, которые через блоки коммутации связаны с формировате5И ями управляющих импульсов, причем входы указанных формирователей объединены и подключены к выходу блока формирования зоны нечувствительности, вход которого через RC-цепь связан с выходом интегрального усилителя. На фиг, 1 приведена схема предлагаемого реверсивного тиристорного электропривода постоянного тока; на фиг. 2 - временные диаграммы, поясняющие работу реверсивного тиристориого электропривода с согласованным управлением групп тиристоров. Реверсивный тиристорный электропривод постоянного тока содержит последовательно соединенные задатчики 1 скорости, блок 2 сравнения, интегральный усилитель 3, систему 4 импульсно-фазового управления, силовой управляемый выпрямитель 5 с согласованным управлением катодной 6 и анодной 7 группами тиристоров с блоками 8 и 9 коммутации, на выходе силового управляемого выпрямителя 5 включены дроссели 10 и 11, между точкой соединения обмоток которых и нулем силового управляемого выпрямителя включен электродвигатель 12 с тахогенератором 13, на магнитопроводах 14 и 15 дросселей 10 и 11 расположены дополнительные обмотки 16 и 17, подсоединенные к блокам 8 и 9 коммутации, которые через соответствующие формирователи 18 и 19 управляющих сигналов и последовательно соединенные блок 20 формирования зоны нечувствительности и RC-цепь 21 подключены к выходу интегрального усилителя 3. Реверсивный тиристорный электропривод работает следующим образом. Устройство имеет три режима работы. Первый режим характеризует работу силового управляемого выпрямителя при малой амплитуде входного сигнала управления, когда реверсивный тиристорный электропривод постоянного тока с малоинерционным двигателем может пропускать частоту входного сигнала вплоть до граничной частоты, определяемой по теореме Котельникова. Второй режим характеризует работу силового управляемого выпрямителя при большой амплитуде -входного сигнала управления, но со скоростью его изменения, не превышающей критическую, равную частоте сети. Третий режим характеризует работу силового управляемого выпрямителя при большой амплитуде входного сигнала управления, когда реверсивный тиристорный электропривод постоянного тока пропускает частоту входного сигнала, превышающую частоту сети. , При подаче задатчиком 1 скорости сигнала управления с малой амплитудой (первый режим) происходит сравнение его в блоке 2 сравнения с сигналом отрицательной обратной связи, снимаемым с тахоГенератора 13. Сигнал ошибки, снимаемый с блока 2 сравнения усиливается интегральным усилителем 3 и поступает на систему 4 импульснофазового управления. С выхода системы 4 импуль.сно-фазового управления, в зависимости от полярности сиггнала управления, снимаемого с интегрального усилителя 3, поступают импульсы управления на включение силового управляемого выпрямителя 5 на положительную или отрицательную полярность выпрямленного напряжения (фиг. 2а). При работе силового управляемого выпрямителя 5 на его выходе появляется уравнительный ток, протекающий через два дросселя 10 и 11 и имеющий направление от катодной группы 6 к анодной группе 7 тиристоров, при этом через один из дросселей (в зависимости от полярности выпрямленного напряжения) протекает ток якорной цепи двигателя 12. С валом двигателя 12 жестко связан вал тахогенератора, выходной сигнал которого сравнивается с заданным сигналом задатчика 1 скорости в блоке 2 сравнения, чем обеспечивается автоматическое отслеживание заданной скорости.
При подаче задатчиком 1 скорости сигнала управления с большой амплитудой (второй режим), но со скоростью изменения, равной частоте сети, реверсивный тиристорный электропривод постоянного тока работает по описанной схеме, а выпрямленное напряжение реверсируется по отрезку синусоиды напряжения, прикладываемого к цепи нагрузки, подключенной последней фазой питающего напряжения. Осциллограмма реверса выпрямленного напряжения при этом режиме показана штрихпунктирной линией на фиг. 2а.
В третьем режиме работы при скорости изменения управляющего сигнала Uy с больщой амплитудой (фиг. 26), превышающей критическую скорость изменения управляющего сигнала, определяемого по выражению (1), вступают в работу последовательно соединенные RC-цепочка 21, осуществляющая взятие производной от сигнала управления U (фиг. 2 с), и блок 20 формирования зоны нечувствительности, осуществляющий задержку минимальных значений сигналов (фиг. 2д). С выхода блока 20 формирования зоны нечувствительности сигнал поступает на формирователи 18 и 19, формирующие управляющие сигналы Ui и Ui соответственно (фиг. 2е), которые предназначены для управления блоками 8 и 9 коммутации, подключающие в зависимости от полярности выпрямительного напряжения дополнительную обмотку 16 или 17 дросселей 10 и 11, соответственно. Идеализированная осциллограмма реверса выпрямленного напряжения силовым управляемым выпрямителем 5, прикладываемого к электродвигателю 12, изображена сплощной линией на фиг. 2а.
Рассмотрим работу силового управляемого выпрямителя 5, когда она из групп тиристоров, например катодная 6, работает в выпрямительном, а анодная 7 в инверторном режимах. В этом случае выпрямленный ток якорной цепи электродвигателя 12 протекает по цепи катодная группа 6 тиристоров - дроссель 10 - якорная цепь электродвигателя 12 - ноль силового управляемого выпрямителя 5. При реверсе (изменении знака) сигнала управления большой амплитуды с производной, превышающей критическую (фиг. 26), вступает в работу RC-цепочка 21, подсоединенная входом к выходу интегрального усилителя 3 (фиг. 2с), а выходом - к блоку 20 формирования зоны нечувствительности, на выходе которого формируется напряжение U (фиг. 2) управления формирователем 18 управляющих сигналов, подающим сигнал управления U (фиг. 2е) на блок 8 коммутации, который в свою очередь формирует мощный импульс в обмотке 16 дросселя 10, находящейся под
током якорной цепи электродвигателя 12, чем и обеспечивается принудительное отключение включенного последним тиристора катодной группы 6 от фазы питающего напряжения. Осцилограмма реверса ЭДС e(t) в этом режиме изображена сплошной линией на фиг. 2а.
При смене полярности выпрямленного тока катодная группа 6 тиристоров переходит в инверторный режим, а анодная группа 7 тиристоров переходит в выпрямительный режим, ток нагрузки протекает по цепи ноль силового управляемого выпрямителя 5 - якорная цепь электродвигателя 12 - дроссель 11 - анодная группа 7 тиристоров. В этом режиме реверсивный тиристорный электропривод постоянного тока работает аналогично описанному выше, но в работу включаются формирователь 19 управляющих импульсов, который выдает сигнал управления Uj (фиг. 2е) на блок 9 коммутации, формирующий мощный импульс в обмотке 17 дросселя 11, находящейся под током якорной цепи электродвигателя 12.
На фиг. 2а приведены идеализированные диаграммы изменения ЭДС e(t) силового управляемого выпрямителя 5 (фиг. 1), изображенные сплошными линиями при максимальном значении управляющего сигнала и его скачкообразном реверсировании. Области, защтрихованные косыми линиями и ограниченные штрихпунктирными линиями, характеризуют появление постоянной составляющей напряжения в уравнительном контуре, направленной в сторону проводимости тиристоров известного реверсивного тиристорного электропривода.
Из осциллограмм видно, что предлагаемое устройство реверсивного тиристорного электропривода постоянного тока позволяет исключить разнополярное напряжение, прикладываемое к якорной цепи электродвигателя силовым управляемым выпрямителем в момент мгновенного реверса сигнала управления (фиг. 2а), чем обеспечивается увеличение быстродействия. Кроме того, исключение появления постоянной составляющей ЭДС при одновременном включении групп тиристоров при реверсировании силового управляемого выпрямителя ведет к снижению потери энергии в уравнительном контуре и к уменьщению динамического уравнительного тока, что приводит к увеличению КПД реверсивного тиристорного электропривода постоянного тока при больших сигналах управления.
Схема предлагаемого реверсивного тиристорного электропривода может быть использована с целью защиты как силового управляемого выпрямителя, так и двигателя от недопустимых аварийных режимов, например при прорыве инвертора.
Формула изобретения
Реверсивный тирис герный электропривод постоянного тока, содержащий электродвигатель, подключенный через дроссели к анодной и катодной группам тиристоров тиристорного преобразователя, последовательно соединенные блоки коммутации, выход одного из них подключен ко входу тиристорного преобразователя, последовательно соединенные систему импульсно-фазового управления, интегральный усилитель, узел сравнения и эадатчик скорости, отличающийся тем, что, с целью повышения быстродействия и увеличения КПД, в него дополнительно введены формирователи управляющих импульсов, блок формирования зоны нечувствительности, RC-цепь, а дроссели снабжены дополнительными обмотками, которые
через блоки коммутации связаны с формирователями управляющих импульсов, причем входы указанных формирователей объединены и подключены к выходу блока формирования зоны нечувствительности, вход которого через RC-цепь связан с выходом интегрального усилителя.
Источники информации, принятые во внимание при экспертизе
(ШЧ. rfi
а«
Ui
Y
Фиг. 2
