(54) УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ГРАФИЧР.СКОЙ ИНФОРМАЦИИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1979 |
|
SU858035A1 |
| Устройство для считывания графической информации | 1989 |
|
SU1735881A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1018136A1 |
| Устройство для считывания графической информации | 1975 |
|
SU568062A1 |
| Устройство для считывания графической информации | 1989 |
|
SU1635203A1 |
| Устройство для считывания графической информации | 1988 |
|
SU1529264A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1372343A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1506460A1 |
| Способ считывания графической информации и устройство для его осуществления | 1980 |
|
SU982037A1 |
| Устройство для считывания графической информации | 1983 |
|
SU1096669A1 |
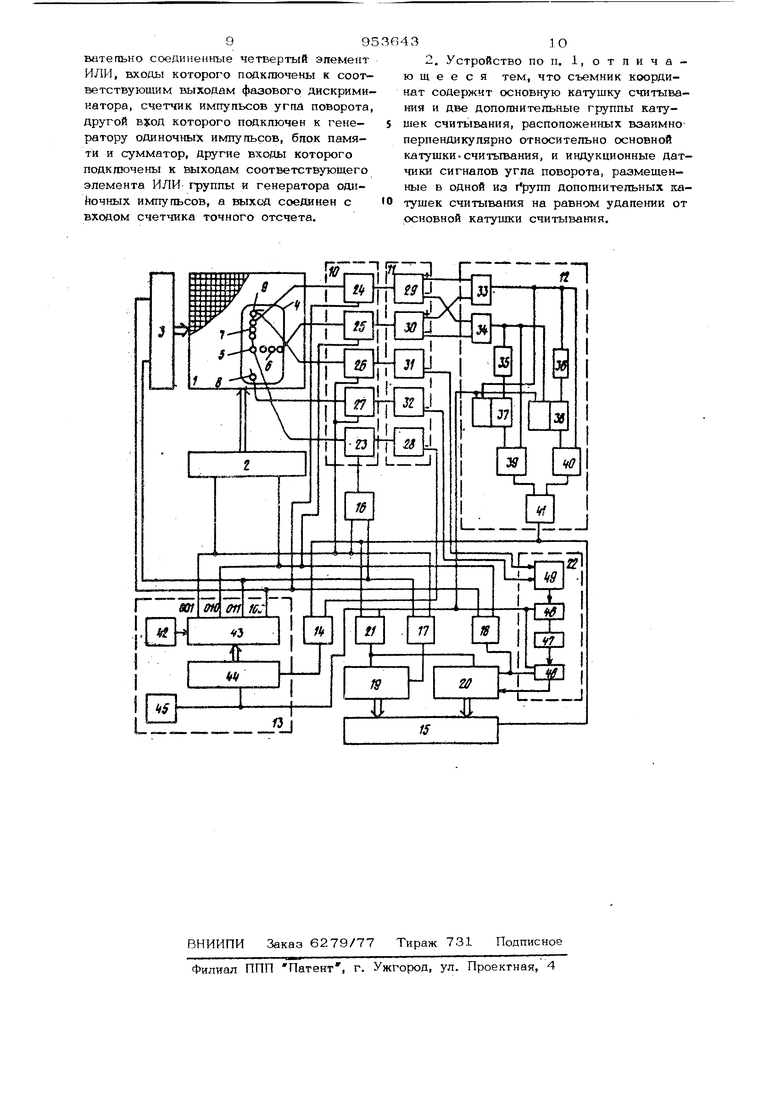
Изобретение относится к автоматике и вычислительной технике и может быть испопьзовано дпя ввода графической инфо мации в ЭВМ и пи выдачи на машинный носитель. По основному авт. св. № 858035 иэвестно устройство считывания графической информации, содержащее планшет, выпопненный в виде двух взаимно ортогональных групп координатных шин, соединенных с соответствуюш.ими коммутаторами, входы которых подключены к блоку управления, съемник координат, подключенный к блоку усиления, св51занному с блоком управления, элементы И, входы которых соединены с первым и вторым счетчиками, фазовые дискриминаторы, под кшоченные к выходам блока усиления и ко входу первого элемента ИЛИ, подключенных к счетчикам и к блоку управления блок анализа фаз сигналов, входы которого подключе а,1 к фазовым дискриминаторам, а выход соединен с первым элементом ИЛИ и с элементами И, второй эneМент ИЛИ, подключенный к блокам управления и усиления, и третий элемент ИЛИ, входы которого соединены с блоками анализа фаз сигналов и управления, а выход подключен к счетчикам, причем съемник координат содержит две группы катушек считывания, расположенных взаимно перпендикулярно, а катушки считывания одной группы соединены последовательно и в противофазе. Недостатком известного устройства является неудобство в работе и малая скорость процесса считывания, так как оператору требуется не только наводить визирное перекрестие на считываемые точки, но и стрюго выдерживать ориентацию съемника координат в процессе считывания. Образование в процессе работы угла ос между направлениями установки катушек считывания и соответствуюшими координатным шинами искажает (в сто-. рону уменьшения) заданное расстояние Р между центракт катушек считътания в направлении соответствующих координат39 осей, преобразуя его в расстояние Р--ГСоЗоб что приводит к С1 ижеяию точности считывания. Поэтому для обеспече шя достаточной точности оператор все время дсткен строго выдерживать ориентацию съемника, что вызывает богаьшое незДобство в работе. Цель изобретения - повышение быстродействия и надежности устройства. Поставленная цеггь достигается тем, что в устройство допопьгитепьно введе 1ы последовательно соединенные четвертый элемент ПЛИ, входы которого подкгаочены к соответствующим выходам фазового дискриминатора, импульсов угла поворота, другой вход которого подключен к генератору одиночных импульсов, блок памяти и сумматор, другие входы которого подкяючешз к выходам соответствующего элемента ИЛИ группы и гене- ратора одиночных импульсов, а выход сое динен с входом счетчика точного отсчета Съемник координат содержит основну:ю катушку считывания и две дополнительные катушек считывания, располо й-сенных взаимно перпендикулярно относит тельно оспоБной катушки считывания, и индукционные датчики сигналов угла пово рота, размешеннье в одной из. групп до полните:тъных катушек считывания на рав ном удалении от основной катушки, считТэванияБлок коррекции точного отсчета и его связи с другими sneMeHTaJvm устройства обеспе гавают определение угла oi поворота съемника относительно координатных осей, соответствующего ему поправочного коэффипиента р/ и умножение точного отсчета на К в процессе формирования кода точного отсчета. Очевид} о, что при повороте съемника коорди нат на угоп d . расстояния Р между каТ5шками считывания в направлении координатных; осей преобразуются в Р sfcoB в чем вызыва.ется прямо пропоргдаонапьно уменьшение вегтичины точного отсчета ко ординаты. Это уменьшение может быть компенсировано соответствующим умноже нием величины точного отсчета на коэффищ ентгдеК)-;;- максимальное число импугсьt-p сов, образующих код точного отсчета при об 0; J- 1максимальное число импупь B-p.cosaS сов, образующих код точного отсчета при повороте съемf 4ника координат вокруг центра визирного перкгкрестья па угоп oi. Коэффициенты для каждого из дискретных значений угла t вычисляются заранее, записываются в бпоке памяти и учитываются путем умножения каждо1о единичного прирашения кода точного отсчета на соответствующий код коэффициента. Угоп oi поворота съемника координат определяется путем подсче7а чиспа импульсов, индуктированных в одном из двух индукционных датчиков сигнала угла поворота положения съемника в процессе опроса координатных щин до момента индукткгрох ания сигнала в основной катгшке считывания. При описанном конструктивном исполнении съемника координат очевидно, что при tX О сигналы заданной полярности в двух датчиках попсжения съемника координат и основной катушке появляются одновременно и k - i , что соответствует случаю устройства по ocHOBHoivfy -изобретению, У-штызак rOs --;то съемник координат имеет электрическую связь с электронным блоком, через соответствующий кабель, поспедний (при соответствующем его размещении) ограничивает диапазон изменения у г па л что дает возможность ограничиться отнсситепьно небольшим кохшчеством дискрет:-сых значений угла oi а именно, для полавпяющего большинства случаев достаточно ограничиться диапазоном сх; i ЯСУ . Па чертеже дана схема предпаг-аемого контроля. Оно содержит планшет 1, комм таторы 2 и 3, съемник 4 координат, основ1гую катушку 5 считывания, две допопкитепь сые группы катушек 6 и 7 считывания, индукциоиньге датчики 8 и 9 сигналов утла поворота, блок 10 усиления, фaзoвьпi дискриминатор 11, блок 12 фазсигналов, блок 13 управления, первый элемент ПЛИ 14, эпемент П 15, второй элемент ПЛИ 16., группы эпемонтов ИЛИ 17 и 18, 19 и 20 точного и грубого отсчета, третий элемент ИЛИ 2 J-, блок 22 коррекции точного оа счета. Блок 10 усиления содержит основной усилитель 23 и дополнительные усилители 24-27, каждый из которых имеет аналоговый и управляющий вхо/лы, служащие соответственно аналогоаымн и управляющими входами блока К) усиления, Фазовый Дискриминатор 11 содержит пять идентичных узлов 2Я--.2 фазовой дискриминации, выда |1П1:х сигнал на ол5ном из двух вь.1ходов в зависимости от попярности входного сигнала. Блок 1-2 анализа фаз содержит два элемента ИЛИ 33 и 34, входы которых служат входами блока 12 анализа фаз, выходы подключены через соответствующие элементы 35 и 36 задержки к одним установочным входам триггеров 37 и 38 (например, единичным входам) и к другим (например, нулевым) установочным входам триггеров 37 и 38, и к вхо /;ам элементов И 39 и 4О непосредстве но. Два дополнительных установочных вх да триггеров 37 и 38 (в данном случа нулевые) и служат установочным входом блока 12 анализа фаз, а выходы триггеров 37 и 38 через элементы И 39 и 40 соединены с элементом ИЛИ 41, выход которого служит выходом бпока 12. Блок 13 управления содержит генератор 42 тактовых импульсов, соединенный со счетным, входом распределитепя 43 импутьсов, к информационным входам которого подключен счетчик 44 операций усгановочный вход которого соединен с генератором 45 одиночных импульсов, счетный вход - со входом блока 13 управления. Блок 22 коррекции точного отсчета содержит последовательно соединенные информационнь ди шинами счетчик 46 км пульсов угла поворота .(съемника координат), блок 47 памяти и сумматор 48, управляющим входом соединенный с четвертым входом бпока 22 коррекции, выходом переполнения - с выходом бпока 22 коррекции, дополнительный элемент ИЛИ 49, Устройство работает следующим образом. После установки визирного перекрестья съемника 4 координат в нужную точку оператор, нажатием кнопки в корпус съемника 4 координат (не показана) запускает генератор одиночных импульсов, производящий начальные установки счетчика 44 операций, счетчик 19 и 2О гру бого и точного отсчетов, триггеров 37 и 38, бпока 12 анализа фаз, сумматора 48 и счетчика 46 импульсов угла поворота, блока 22 коррекции точного отсчета. При установке на счетчике 44 операций кода О01 операции грубого отсчета координаты X j, сигналы распределите пя 43 импульсов запускают коммутатор 2 коордлнатных шин X поступают через элемент ИЛИ 17 на счетный вход с .етчика 19 грубого отсчета и через эпемент ИЛИ 16 - на управляющие вход 4:3 основного усилитепя 23 н дополнительных усилителей 26 и 27. При этом про- исхоД1т последовательное возбуждение координатных шин импутисами тока и подсчет, числа опрошенных шин счетчиком 19 грубого отсчета. Если съемнт1к 4 координат noBoptryT относительно координатных шин на угол Х;то в процессе опроса координатных шин наступает момент,. когда возЬух дены шины, расположенные справа от одного из двух индукционных датчиков 26 и 27 угла Oi До-того, как вазбу дится шина, находящаяся справа от цент ра основной катущки считывания, В зависимости от направлеш1я поворота съемника 4 координат один из дополнитель 1ых уси)штелей 26 и 27, стробкруемый импульсами по выходу 001 распредепптепя 43импульсов выдает сиг.;япы, которые, пройдя соответствующий на узлов 31 ii 32 фазовой дискриминации поступают по первому или второму входу бпока 22 коррекции точного отсчета через допо ни эльный элемент ИЛИ 49 на счетчик 46 u; fП1льсов угла поворота. При возбуя дении . первой координатной шины, нах&дящейс ; справа от центра основной катушю 5, считывания основной усит:тел1з 23, сттобируемый имплпьсами по выходу 001 распределителя 43 nMnj-n.bcoB, выдает индуктированный сигнал определенной полярное- ти, выделяемый узлом 28 фазовой дтскриминации, с выхода которого сигнал поступает через элемент ИЛИ 14 на счетчик 44операций, чем прекращается поступление импульсов по дзыходу 001, и на счетчике 44 операций устанавливаетсякод О10, Таким образом, в результате выполнения первой операции определяется гру бый отсчет координаты х (код счетчике. 19) и угол поворота съемника 4 координат (код счетчика 46). Во второй операции (точный отсчет, определяемый кодом 01О), происходит дальнейший опрос координатных 1Ш{н X при одновременном подсчете импульсов опроА и многократном суммировании дробаой части числа соответствующего углу поворота 0 съемника 4 координат относительно координатных щин. Дробная часть числа k (k;.) записана в блоке 47 па-, мятй и определяется содержимым счетчика 46 импульсов угла поворота. При переполнении сумматора 48, сигнал с выхода переполнения на счетный вход счетчика 20 точного отсчета и до бавляет к его содержимому единиц . Происходит фактическое умножение те1сушей 79 вопичинь точного отсчета координпть на соответствующий коэффициент . При выборе определенного шага () расположения дополнитепьных катушек 6 считывания на выходе группы .допопннт-:;пьных датушек б считывания появляется поспе/юватеяьность импупьсов, полярность кот рых поочередно изменяется от шины к шине До тех пор, пока не возбуждается количество дополнительных шин, число ко торых равно числу шагов смешения центра основной катушки 5 считывания относительно соответствуюаюй шины, от кото рой получен грубый отсчет. Сигналы с группы дополните пьных катушек 6 считы вания стробируются импульсами с выхода 010 распределителя 43 импульсов, усиливаются дополнительным усилителем 25 а затем узел 30 фазовой дискриминации определяет их полярность, С узла 30 им пупьсы по двум выходам поступают в блок 12 анализа фаз, где, пройдя соответствуюший из элементов ИЛИ 33 и 34 поступают через элементы 35 и 36 задержки на одни (например, единичные) ус тановочные входы триггеров 37 и 38 не посредственно, а также на один из входов элементов И 39 и 4О, на другие вхо ды которых поданы сигналы с выходов триггеров 37 и 38. Если фаза двух смежных индуктирован ных импупьсов изменяется то на выходах соответствующих элементов И 39 и 40 сигнал отсутствует. Если же подряд следует два импульса одной полярности (т.е. соответствующий выход узпа 30 фазовой дискриминации вьщает два импульса подряд), то на выходе одного из элементов И 39 и 40 появляется сигнал свидетельствующий о том, что проиаошпо возбуждение дополнительного чис.ш координатных шин, соответствующего величине смешения визирного перекрестья относительно зафиксированной шины грубого отсчета, и формирование координаты X на этом закончится. Этот сигнап, пройдя элемент ИЛИ 41, производит через элементы И 15 выдачу кода счетчиков 19 и 20, на которых зафиксирована к этгому моменту скорректированная координата X в канал ЭВМ (иди другое приемное устройство), изменяется код счетчика 44 операций и через элемент ИЛИ 21 устанавливает в начальное состояние счетчики 19 и 2О для поспедую шего формирования координаты. Формирование координаты происходит аналогичным образом. При этом распреде гштепь 43 импульсов вьщает сигналь; по выхо/1ам (Я и И)(.1, уир/П ПЯ10Щ1е коммутатором :. коорД П ат- гьгх UJHI-: и И форкирошиши точного отсчета коор( Ц участвует i-pyiiiia Дополнитель.ч.ых катушек 7 считывания, рйсположе п{ь;х с тем жо шагом по прямой, перпендш-гуЯЯ{зной к прямой расположения i-руппь дсполнитеггьных катушек 6 считы. гтри испот зованр5н того же коэффиш-гента ког ; екции k,. Изобретение позвонит слщественно повысить удобство устройства в работе и ускорит процесс считываш-in, F3 гшкэстнгл-; устройстве оператору требовалось ме гопько наводить визирное перокресг),-а на считываемые точки, но и строго выдерживать ориентацию Сьемника координат в процессе считывания, чтобы обеспечить высокую точность. Е предложенном устройстве устраняется требование жесткой ориентации съемника коордиргат и становится возможным его поворот прп сохранении той же точности. Уч11тывая. чтс съемник координат связа с блоком усипеит-гя гибкий кабель, последний, при соотгютствуюшем его размещении, огра/гичнверг диапазон изменения у г па повооота съём шка координат, что Даст возл ожность ограмичится от11оситепьно нобопъшим коничестном днскр-етных значений угла поворота (i; и именно дтм подавляющего бо;1Ь шинства случаев достаточно ограничиться диапазоном (X , В попуавтоматн4ocKj x ycTpoficisax весь процесс считывашгя можно разделить на два этапа: л сгановка оператором визирного перекрестья съелМника ко-ординат над считываемой точкой и непосредственное считывание (раб€)та зстройства.), ГЗторой этап выпопняг-тся примерно в раз быстрее первого, В цаггаом устройстве время выполнения первого этапа несколько у 1еньшится по сравнению с известным, поскспьку оператору надо Ш1шь наводить съемник коордкнат г-а считывасмые точки, В извсстпоК устройстве, кроме того от оператора требовалось еше и постоякио выдерживать точ1Р/к1 ориентацию съемника коордкиат от оси те ть- но координатных шин, что эаме ;пяпо процесс считывания инфopvIiцiv примерно в 1,5 раза. Формула и 3 о б р ;; т е н ,1 и 1, УстрогЧство Для счигт; вл; ;5; .р.фической информацир- по аът, св. № . J, о т л и ч а ю ш е с; с я тем, , с lU;га ю повышения быстроДейстВ1:я у. ; а;1 жности устройства, оно со/лоржит по: ис-ловатепьно соединенные четвертый элемент ИЛИ, входы которого подкгаочены к соответствующим выходам фазового дискриминатора, счетчик импульсов уггш поворота, другой вуод которого подключен к генератору одиночных импульсов, блок памяти и сумматор, другие входы которого подключены к выходам соответствующего элемента ИЛИ группы и генератора однйочных импульсов, а выход соединен с входом счетчика точного отсчета.
