1
Изобретение относится к электроприборостроению, в частности к электромеханическим регистрирующим устройствам, и может быть использовано как исполнительный орган в быстродействующих следящих системах и регистратоpax со схемой уравновешивания.
Известен электромагнитный механизм, содержащий два постоянных магнита, ,. вал, якорь с накладкой, расположенный на валу и выполненный из двух ферромагнитных башмаков, между которыми расположена пластина из нитного материала, магнитопровод, ,5 управляющую обмотку и перо l .
Недостатками известного электромагнитного механизма являются узкий диапазон частот входного сигнала порядка 20 Гц) и низкая томность 20 при больших углах отклонений подвижной части, в связм с чем известный электромагнитный механизм имеет малые углы отклонения (12-1 °).
Цель изобретения - расширение частотного диапазона и увеличение точности.
Эта цель достигается тем, что сз электромагнитный механизм, содержащий два постоянных магнита, вал с расположённым на нем якорем из ферромагнитного материала с накладкой, магнитопровод, управляющую обмотку и перо, дополнительно введены два постоянных магнита и неподвижный сердечник- из ферромагнитных пластин с двумя парами диаметрально расположенных пазов г якорь выполнен из двух цилиндрических пластин, накладка якоря выполнена крестообразной из диамагнитного материала, при этом управляющая обмотка расположена в одной паре пазов неподвижного сердечника, а постоянные магниты расположены в углах магнитопровода.
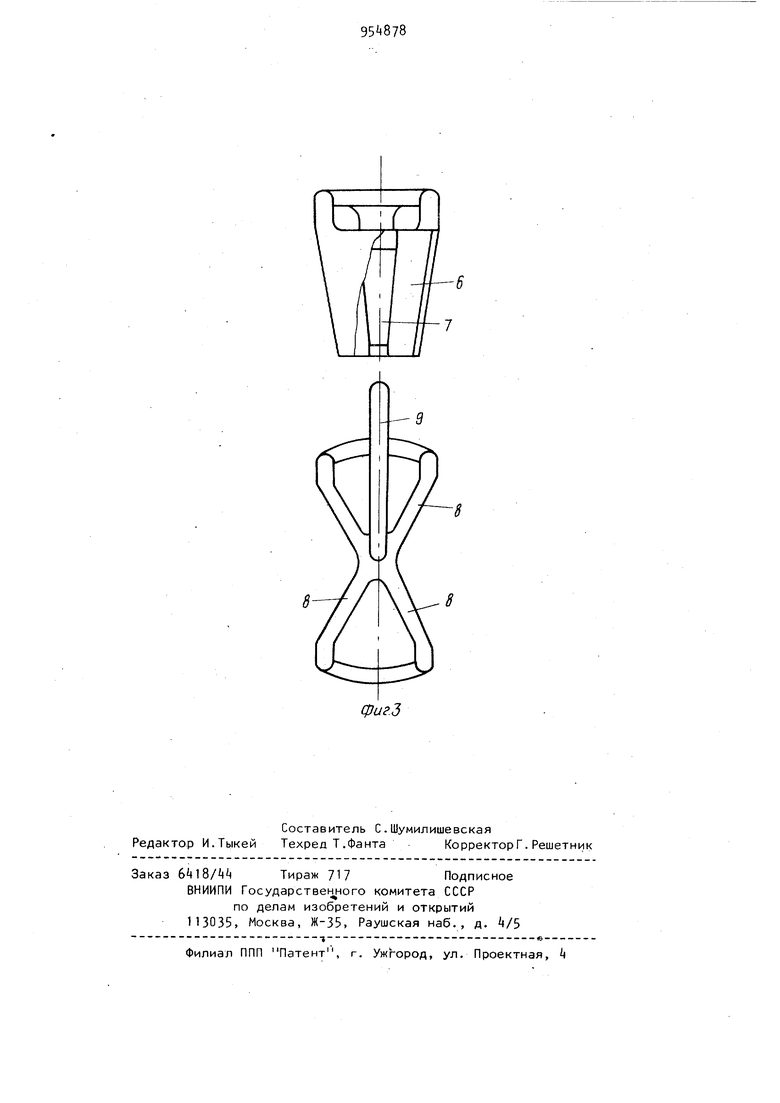
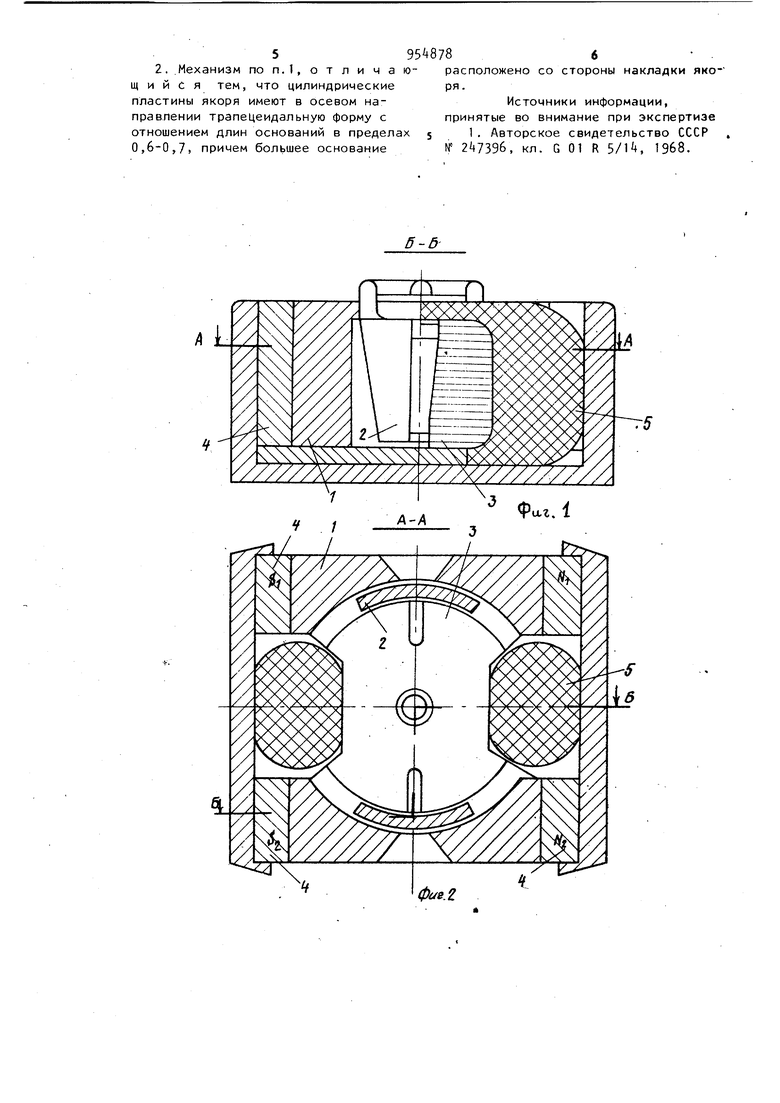
Кроме того, цилиндрические плас тины якоря имеют в осевом направлении трапециедальную форму с отношеий ем длин оснований, находящимся в пределах 0,6-0,7, причем большее основание расположено со стороны на кладки якоря. На фиг.1 изображен электромагнит ный механизм, продольный разрез; на фиг.2 - то же, поперечный разрез; на фиг.З. - подвижная часть электромагнитного механизма. Электромагнитный механизм содержит магнитопровод 1, якорь 2, непод вижный сердечник 3, постоянные магниты 4, управляющую обмотку 5. Якор выполнен полым из двух цилиндрических ферромагнитных пластин 6. Пл тины 6 якоря в проекции на плос кость симметрии электромагнитного механизма (плоскость Б-Б на фиг имеют форму равнобочной трапеции с отношением длин оснований 0,6-0,7, что обеспечивает изменение суммарного м мента вращения, а, следовательно, л нейность преобразования. Пластина 6 якоря закреплена на валу 7 с помощью накладки 8 якоря, выполненной крестообразной формы из диамагнитного материала, чтобы не шунтировать рабочий поток. Вал 7 выполнен в алде усечённого конуса, к большему основанию которого крепится накладка 8 якоря, что п§)зволяет свободно устанавливать и извлекать подвижнуючасть электромагнитного механизма. Перо 9 крепится к валу 7- Сердечник 3 имеет цилиндрическую форму, набран из феррома - нитных пластин и имеет две пары диа метрально расположенных пазов, в одной паре которых расположена упправляющая обмотка 5, ограничивающая угловое перемещение якоря 2. Электромагнитный механизм работает следующим образом. В отсутствии тока в управляющей обмотке 5 магнитный поток постоянны магнитов 4 удерживает якорь 2 в среднем положении, при этом перо 9 находится в нулевом положении. При протекании тока по виткам управляющей обмотки 5 создается магнитный поток управления, который, проходя по неподвижному сердечнику 3. раздваивается по-полюсам магнитопровод да 1. Два полюса (по диагонали ма нитопровода 1 становятся более насыщены магнитным потоком, чем другая пара полюсов. Пластины 6 якоря втягиваются в зазор между полюсами мап итопровода 1 и сердечника 3 в направлении большего магнитного потока. При изменении направления тока в обмотке управления изменяется и направление магнитного потока. Уже другая пара полюсов (по диагонали) магнитопровода 1 и сердечника намагничена сильнее, так что при изменении направления тока происходит поворот пластин 6 якоря в ту или другую сторону до тех пор, пока вращающий момент, создаваемый одной парой полюсов, не будет уравновешен противодействующим моментом, создаваемым другой парой полюсов. Таким образом, при прохождении тока по управляющей обмотке 5 происходит перераспределение магнитных потоков и перемещение пластин 6 .якоря на угол, пропорциональный величине тока. Снижение массы подвижной части, введение дополнительных постоянных магнитов и неподвижного сердечника, в пазах которого располагается управляющая обмотка, а также выполнение пластин якоря скошенными позволяет повысить частотный диапазон электромагнитного преобразователя до 350 Гц и увеличить угол поворота подвижной части до 25 при сохранении точности что, в свою очередь, расширяет функциональные возможности устройтсва и позволяет использовать его в следящих системах и устройствах регистрации быстроменяющихся величин. Формула изобретения 1.Электромагнитный механизм, содержащий два постоянных магнита, вал с расположенным на нем якорем из ферромагнитного материала с накладкой, магнитопровод, управляющую обмотку и перо, отличаю щ-ийся тем, что, с целью расширения частотного диапазона и увеличения точности, в него дополнительно введены два постоянных магнита и неподвижг ный сердечник из ферромагнитных пластин с двумя парами диаметрально расположенных пазов, якорь выполнен из двух цилиндрических пластин, накладка якоря выполнена крестообразной из диамагнитного материала, при этом управляющая обмотка расположена в одной паре пазов неподвижного сердечника, а постоянные магниты расположены В углах магнитопровода.
5 9548786
2. .Механизм по п.1, о т л и ч а ю-расположено со стороны накладки якощ и и с я тем, что цилиндрическиеря.
пластины якоря имеют в осевом на-Источники информации,
правлении трапецеидальную форму спринятые во внимание при экспертизе
отношением длин оснований в пределах5 Авторское свидетельство СССР ,
0,6-0,7, причем большее основаниеN 2 47396, кл. G 01 R 5/1, 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ДВУХСТУПЕНЧАТЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2444110C2 |
| Электрическая машина с модульными зубцами статора и обмотками из сверхпроводникового материала | 2020 |
|
RU2747884C1 |
| РАДИАЛЬНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР | 2013 |
|
RU2558661C2 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2366063C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА СО СПЕЦИАЛЬНЫМ ВОЗБУДИТЕЛЕМ | 2009 |
|
RU2418353C2 |
| Электромагнитный механизм | 1984 |
|
SU1205030A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| Линейный электрический двигатель постоянного тока | 1981 |
|
SU1001350A1 |
| Самотормозящийся электродвигатель | 1982 |
|
SU1030919A1 |