Изобретение относится к навигационной технике и может быть использовано в частности, при разработке, изготовлении и испытании магнитных компасов.
Известен способ измерения погрешности магнитного компаса при качке, характеризующийся установкой его на качающийся стенд, съемом первоначального отсчета в статическом положении, выдержкой в состоянии качки последовательно в двух взаимно перпендикулярных направлениях, снятием отсчетов во время действия качки, определением погрешности при качке как разности отсчетов, полученных в статическом состоянии и при качке 1 .
Недостатком этого способа измерения погрешности является то, что при выдержке компаса в состоянии качки последовательно в двух взаимно пер1 ендикулярных направлениях из результата измерений выпадает составляющая погрешности, зависящая от совместного действия.качки в двух взаимно перпендикулярных направлениях, определяемая произведением амплитуд а( а2 совместной качки, где а и а - амплитуды качки в плоскости магнитного меридиана и в плоскости, перпендикулярной магнитному меридиану.
Наиболее близким к предлагаемому по технической сущности является способ измерения погрешности на качке, согласно которому качку осуществляют в прлости, составляющей с плоскостью магнитного меридиана угол,
10 равный arctg aj/a с амплитудой,
равнойл|а + а., где а и aj - упомянутые амплитуды качки, соответствующие максимальным эксплуатационным амплитудам килевой и бортовой
15
2.
причем а2 а
качки компаса,
Однако известный способ не полностью имитирует наиболее неблагоприятный эксплуатационный режим, в котором наряду с горизонтальной (бор20товой и килевой) качкой имеет место вертикальная качка а, обусловленная, в частности, установкой компаса не над центром качания судна. 25 В итоге из резу гьтата измерений выпадает составляющая погрешности, определяемая произведением амплитуд агаз совместной качки.
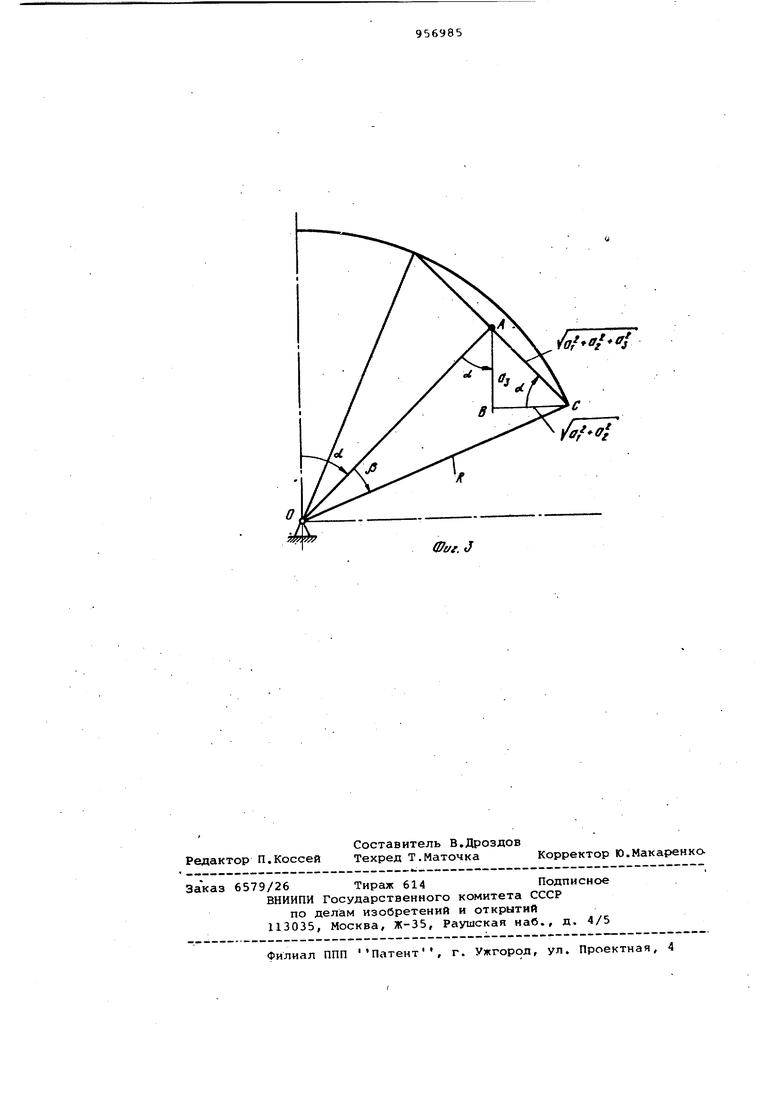
Целью изобретения является повы30шение достоверности лабораторных измереннй погрешности магнитного ком паса при качке. Поставленная цель достигается тем, что согласно способу, включаю щем снятие показаний в статическом положении компаса, затем при качке соответствующей максимальным экспл атационным амплитудам, в плоскости, составляющей с плоскостью магНИТИОГС1 меридиана угол Ьавный аркт генсу отношения амплитуды качки в направлении, перпе ндикулярном магнитному меридиану, к амплитуде кач ки в направлении магнитного мериди ана, и вычисление разности показаний компаса в статическом положени и при качке, статическое положение компаса смещают в плоскости угла (ji arctg a,j/a на угол об , равный arcsin . aU ч 2 а амплитуду качки р устанавливают равной -/aL+al+a ,, arcsin R амплитуда качки в направгде а лении магнитного меридиан амплитуда качки в направлении, перпендикулярном м нитному меридиану; амплитуда вертикальной ка ки; радиус качки. Это следует из формулы погрешно ти магнитного компасапри качке с равными частотами и равными началь ными сдвигами фаз колебаний j - |2,(Pt+S,)-f (2Pt+S2)-f (|1 Ь )cos(E,-2||f (), где у - погрешность магнитног компаса при качке; . ja и Ej) - амплитуды и начальные сзиЕ, фазы колебаний при ка чке в направлении маг нитного меридиана в направлении, перпенди кулярном магнитному меридиану. В вертикальном направлении соот ветственно: Р - частота качки; t - время; - угол наклонения вектора напряженности магнитног поля Земли; g - ускорение, силы тяжести; К - собственная частота колебаний магнитного чувствительного элемента вокруг вертикальной оси; I,,I,Ij - моменты ин€фции магнитного чувствительного элемента вокруг взаимно перпендикулярных продольной , поперечной и вертикальной его осей, проходящих через точку опоры, соответственно; S nfij- сдвиги фаз колебаний. Действительно, благодаря такому способу измерения погрешности магнитного компаса, в результат измерения входят не только периодические составляющие с частотой и двойной частотсй кaчки а также систематическая составляющая, забисящая от совместной качки в ортогональных горизонтальных направлениях, но и систематическая составляющая, определяемая совместной качкой в направлении, перпендикулярном магнитному меридиану, и в вертикальном направленИи. Так как качка осуществляетс я с линейной амплитудой, рс.внойл/а +а2+аз , то проекция качки на направление меридиана, направление, перпендикулярное меридиану, и вертикальное направление равны а, aj и а, что соответствует заданным максимальным эксплуатационным амплитудам качки. При этом способе периодическая с частотой качки составляющая погрешности { первое слагаемое) будет максимальна, так как в направлении, перпендикулярному магнитному меридиану, действует, качка с амплитудой а2, которая больше или равна ампдитуде а. Размер составляющей погрешности с двойной частотой качки (второе слагаемое) также максимален, так как не зависит о1 -ориентации направлений качки и фаэовых сдвигов между ними. Поскольку качка практически линейна, т.е. сдвиг между начальными фазами ортогональных пространственных колебаний равен нулю ( О/ E2-Ej 0), то систематические составляющие погрешности, определяемые третьим и четвертым слагаемьп«1И, также максимальны.° На фиг.1 показана векторная схема перемещения компаса при переводе качки судна на курсе, близком к четвертому; на фиг.2 - система отсчета О, C,f i на фиг.З - векторная схема перемещения компаса при качке корпуса в плоскости tj. Для осуществления способа доста- точно использовать однокомпонентный стенд, плоскость качки которого составляет d плоскостью магнитного меридиана угол ( . Этот угол может быть получен или разворотом плоскости качания стенда относительно плоскости меридиана, или разворотом (например, кольцами Гельмгольца) вектора напряженности магнитного по ля относительно плоскости стенда. Для смещения статического положения компаса на угол (X относительно вертикали может быть использован кронштейн, закрепленный на столе стенда, к верхней наклонной плоско ти которого закрепляется компас. Угол р, определяемый заданными параметрами качки, устанавливается регулировочными органами провода качки. Способ представляет следующую совокупность и последовательность оптации. Плоскость качки стенда устанавливают под углом Ц к плоскости магнитного меридиана, причем ajXa, обеспечивают наклон об статического положения закрепляемого на стенде компаса. На стенде устанавливают линейную амплитуду качки, ра ную - а +а2 +аJ . В статическом положении стенда при наклонном на угол об положении компаса снимают показан компаса. Затем компас подвергают во действию качки, при этом также снимают показания компаса. Погрешность компаса определяют как разность меж ду показаниями в статическом положении и полученными при воздействии качки. ; Использование предлагаемого спос ба позволяет повысить достоверность оценки эксплуатацийнной погрешности магнитного компаса по результатам ее. измерения в лабораторных условия так .как регистрируемая погрешность включает в себя максимальные состав лякмдие, пропорциональные ортогональ ным составляквдим пространственной качки. Формула изобретения Способ измерения погрешности магнитного компаса при качке, вк.гаочающйй снятие показаний в статическом положении компаса, снятие показаний при качке, соответствующей максимальным эксплуатационным амплитудам, в плоскости, составляющей с плоскостью магнитного меридиана угол, равный арктангенсу отношения амплитуды качки в направлении, перпендикулярном магнитному меридиану, к амплитуде качки в направлении магнитного меридиана, и вычисление разности показаний компаса в статическом положении и при качке, отличающийся тем, что, с целью повышения достоверности измерения, статическое положение компаса смещают в плоскости угла Y arctg на угол о(., равный arcsin . а амплитуду качки fb устанавливают равной +al+a arcsin где а, - амплитуда качки в направлении магнитного меридиана; амплитуда качки в направлении, перпендикулярном магнитному меридиану; амплитуда вертикальной качки;R радиус качки. причем aj Источники информации, принятые во внимание при экспертизе 1.Отраслевой стандарт Судовая навигационная техника. Компасы магнитные. Общие технические условия , ОСТ 5.8415-76 п.5.21. 2.Авторское свидетельство № 609952, кл. G 01 С 17/38, 03.01.77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний гироскопических приборов | 1980 |
|
SU1059427A1 |
| МАГНИТНЫЙ КОМПАС И СПОСОБ СМЕЩЕНИЯ ЦЕНТРА МАСС ЕГО МАГНИТНОЙ СИСТЕМЫ | 1992 |
|
RU2086920C1 |
| Устройство для определения полукруговой девиации компаса | 1977 |
|
SU742709A1 |
| Устройство для измерения углов наклона | 1986 |
|
SU1420369A1 |
| Дистанционный магнитный компас | 1978 |
|
SU777429A1 |
| Способ определения динамической погрешности магнитного компаса, вызванной качкой, и устройство для его реализации | 2019 |
|
RU2718691C1 |
| Прибор для определения направления астрономического меридиана | 1940 |
|
SU67877A1 |
| Ядерно-магнитометрическое устройство | 1977 |
|
SU661475A1 |
| МАГНИТНЫЙ КОМПАС | 2007 |
|
RU2338157C1 |
| Устройство для определения параметров магнитного поля | 1987 |
|
SU1566218A1 |