Изобретение относится к технике регулирования температуры, а именно к устройствам для регулирования технологических параметров, например температуры, давления, вакуума и т.д. и может быть использовано для поддержания параметров процесса согласно программы/ либо для форсироьанного и высокоточного выведения параметра, объекта регулирования к уставке задания без пробега.
Известны двухпозиционные и трехпозиционные регулятору (температуры) а также регуляторы, обеспечивающие уменьшение колебательности за счет ;;спользования обратных связей, изменяющих положение рабочей точки в процессе подхода системы в согласованное состояние. В двухпозиционном регуляторе, за счет корректирующей обратной связи, обеспечивается лучшее качество регулирования в сравнении с регуляторами, в которых эта связь отсутствует 1.
Наиболее близким по технической сущности к предлагаемому является устройство для регулирования температуры, в котором действие Обратной . связи, вызывающей различную интенсивность -разогрева датчика температуры
зависит от скважности работы триггера, в плечо которого включен исполнительный элемент объекта регулирования. Поскольку более сильному отклонению от согласованного состояния соответствует диапазон с большей изменяющейся скважностью вкл очений триггера, то разогрев датчика температуры более интенсивен.. Поэтому бо10лее .интенсивно восстанавливается баланс резистивного моста, в плечо которого включен датчик теьшературы. При остывании датчика температуры вновь возникает разбаланс и система
15 приходит в согласованное состояние уже при другой, меньшей температуре датчика и при другом диапазоне включений с меньшей изменяющейся скважностью. Обеспечивается последова20тельное изменение скважности в цикле включено - выключено с уменьшением диапазона скважности включений в диапазоне начиная от , осуществляется гибкая обратная связь с из25менением интенсивности ее действия при различной величине возмущений Г2.
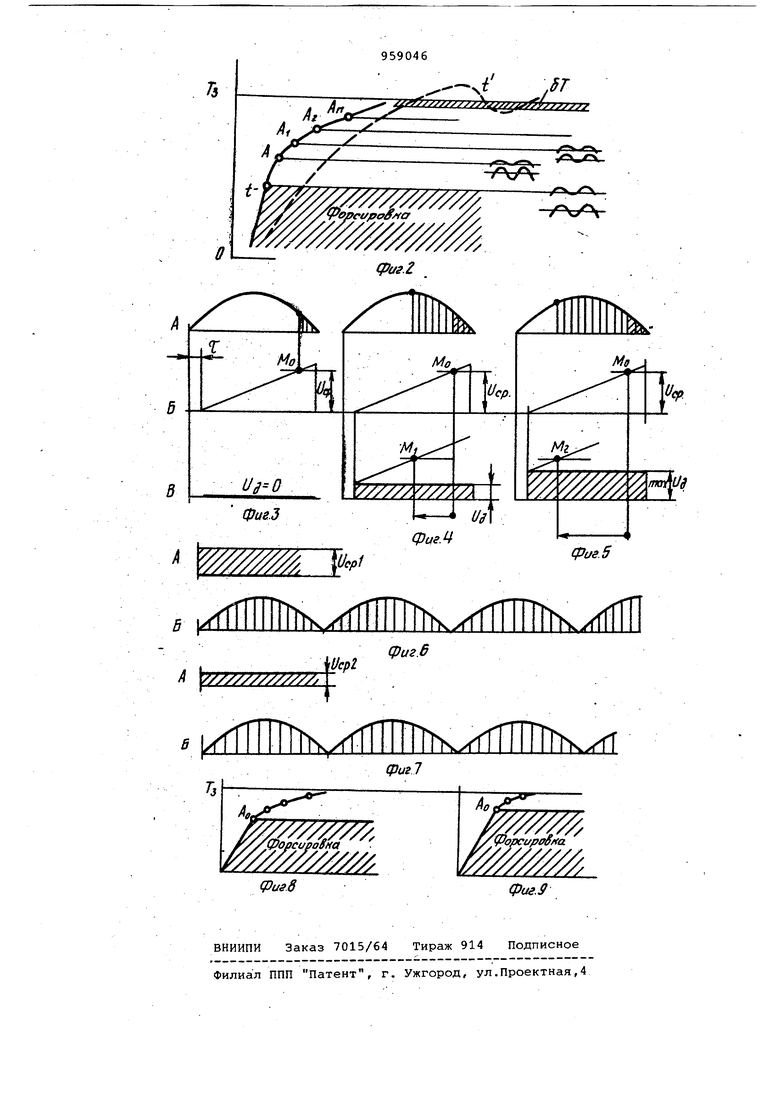
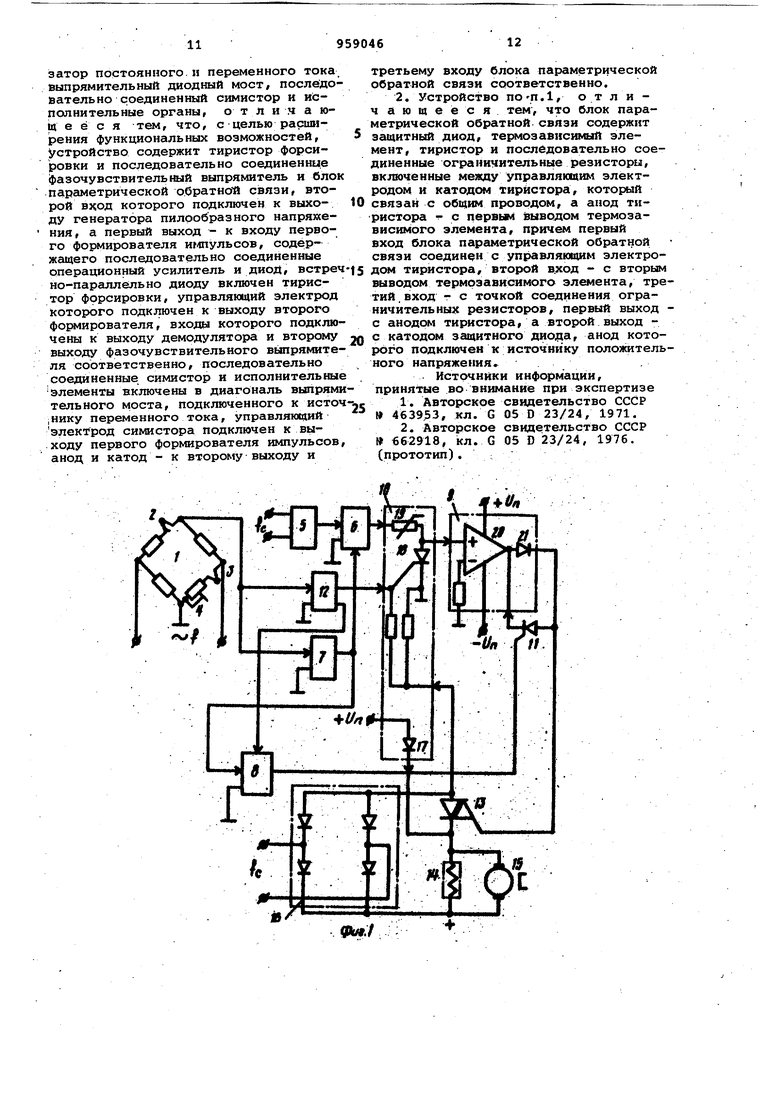
Однако известное устройство характеризуется недостаточно широким диапазоном применения, так как не30обходшллм условием возможности функционирования является наличие термо чувствительного резистора, включайного в плечо резистивного моста, измерительная диагональ которого включена в плечо триггера с исполнительным элементом. При регулйрОва НИИ более высоких температур исполь зовать терморезистор, не представляе ся возможным, а используются другие датчики, например термопары, как например, в случае стабилизации тем пературы катода электронно-лучевого испарителя материалов, возбуждающего стабилизированный эмиссионный ток луча.. Существенным -недостатком известного устройства является невозможность его использования в следящей системе, либо когда необходимо устав ку задания перевести с высшего параметра на низший. Это объясняется тем что при изменении, например, температуры с низшей на высшую на измерительной диагонали резистивного моста при приближении к температуре уставки задания возникает баланс, после чего при дальнейшем повышении сигнал рассогласования, как бы мнимый, возн никает вновь. Переводить уставку задания можно только с низшего параметра на высший. Недостатком устройства является и отсутствие возможности форсировки переходного режима, что объясняется линейным характером широтно-импульсногй управления. Для ряда процессов с большой интенсивностью возмущающих воздействий на регулируемый параметр существует необходимость линейный характер широтного управления остав. лять только для малых рассогласований j т.е. для определенного уровня, желательно регулируемого, после чего обеспечивать релейный характер отработки. Конструктивным и технологическим неудобством известного устройства является необходимость обратную связ заводить на сам датчик (температуры) что ограничивает возможность его миниатюризации, так как датчик долже рассеивать определенную мощность. Неудобства также имеются с точки зрения техники безопасности и невысокой надежности такого те:{нического решения. Кроме того, недостатком устройств является сложность настройки двух .каналов. При этом, для того, чтобы изменить уставку задания, изменяют порог срабатывания формирователей обоих каналов, т.е. настройка требует высокой квалификации обслуживающего персонала. Целью изобретения является расширение функциональных возможностей устройства. Указанная цель достигается тем, :что устройство для регулирования технологических параметров содержит последовательно соединенные компенсационный мост с датчиком параметра в одном из плеч моста, демодулятор и генератор пилообразного напряжения, к второму входу которого подключен синхронизатор, первый и второй формирователи импульсов, источники постоянного и переменного тока, выпрямительный диодный мост, последовательно соединенные симистор и исполнительные органы, а также тиристор форсировки и последовательно соединенные фазочувствишельвый выпрямитель и блок параметрической обратной связи, второй вход которого подключен к выходу генератора пилообразно.го напряжения, а первый выход - к входу первого формирователя импульсов, содержащего последовательно соединенные операционный усили-. тель и диод, встречно-паралллельно диоду включен тиристор форсировки, управляющий электрод которого подключен к выходу второго формирователя, входы которого подключены к выходу демодулятора и второму выходу фазочувствительНого выпрямителя соответственно, последовательно соединенные симистор и исполнительные элементы включены в диагональ выпрямительного моста, подключенного к источнику переменного тока управляющий электрод симистора подключен к выходу первого формирователя импульсов, анод и катод - к второму выходу и третьему входу блока параметрической обратной связи соответственно. Блок параметрической обратной связи содержит защитный диод, термозависимый элемент , тиристор и последовательно соединенные ограничительные резисторы, включенные.между управляющим электродом и катодом тиристора, который связан с общим проводом, а анод тиристора - с первым выводом термозависимого элемента, причем первый вход блока параметрической обратной связи соединен с управлякицим электродом тиристора, второй вход - с втором выводом термозависимого элемента, третий вход с точкой соединения ограничительных резисторов, первый выход - с анодом тиристора, а второй выход - с катодом защитного диода, анод которого подключен к источнику положительного напряжения. Такая структура устройства обеспечивает внутреннюю, гибкую обратную связь и позволяет в компенсационном мосте использовать различные типы датчиков и преобразователей неэлектрических величин в электрические, в том числе и терморезисторы.. Введение симистора с его возможноетью поджига от положительных и от-ри цательных импульсов, а также onepa ционного усилителя в составе формирователя позволяет осуществить форсиров1ку .переходных процессов J Введе ние фазочувствительного выпрямителя обеспечивает универсальность регули рования в следящем режиме согласно программы, то есть от высшей уставки задания к низшей и наоборот. Использование одного генератора пилообразного напряжения упрощает настройку .и регулировку регулятора. На фиг.1 .изображена структурная блок-схема устройства; на фиг.2 диаграммы температуры в переходном режиме: t - предлагаемого устройства и t - прототипа. На фиг.3-5 - сравнительные диаграммы предлагаемого устройства в стадиях широтного управления.генератора пилообразного напряжения по вертикальному способу: на А - заполнение синусоиды на и полнительном органе, . . на. Б - порог срабатывания MQ фо мирователя с операционным усилителе и диодом, на В - при различных сигналах рассогласования на выходе демодулятора (фиг.3-5), где 11з 0; . средний уровень; max Kg- максимум. На фиг.б и 7 - диаграммы форсиро ки гфи различных порогах настройки второго формирователя. на А - соответственно фигурам б и 7, где порог срабатывания согласно настройки соответствующей максимальному сигналу выхода демодулятора; max Ujj и согласно настройки и. : На фиг.8 и 9 - диаграммы переходных рехсимов при разных настройках форси ровки (фиг.6 и 7).Устройство для регулирования тех нологических параметров, например температуры,.давления, вакуума и т.д., содержит СФИГ.1) компенсацион ный мост. 1, в плечи которого включе ны соответственно датчик 2 параметр (преобразователь) и компенсационный элемент 3, последовательно соединен ный с регулировочньм резистором 4 уставки заданий, синхронизатор 5, генератор пилообразного напряжения (ГПН), демодулятор 7, формирователи импульсов 8 и 9, блок параметрической обратной связи 10, тиристор фор ровки 11, фазочувствительный выпрям тель 12, симистор 13, исполнительны .органы 14 и 15, выпрямительный диод ный мост 16, при этом блок 10 параметрической обратной связи содержит защитный диод 17, тиристор 18, термозависимый элемент 19, а фоЕЯИирователь 9 содержит последовательно соединенные операционный усилитель 20 и диод 21. Компенсационный мост J. питающей диагональю подключен к источнику питания переменного тока . произвольной частоты (желательно f / с,гдБ ,- частота напряжения питания исполнительных органов), а измерительной диагональю - к демодулятору 7 и фазочувствительному выпрямителю 12 и служит для выработки сигналов рассогласования.. ДаГчик 2 технологического параметра и компенсационный элемент 3 помещены один на объекте регулирования, другой в . термостате. Посредством демодулятора 7 вырабатывается управляющее напряжегние (фиг.3-5, соответственно 1) 0,ЦдИ max и) для ГПН, синхронизированного синхронизатором 5 с частотой синхронизации ff- питающего напряжение. Посредством фазочувствительного выпрямителя 12 определяется фаза напряжения измерительной диагонали компенсационного моста 1. При фазе 0-180° фазочувствительный выпрямитель 12 вырабатывает нулевое .напряжение., а при перевороте фазы, что возникает в области превышения объектом регулирования заданного параметра, - положительное напряж.ение, блокирующее прохождение сигнала рассогласования, поджигающего.симистор 13, включенный в диагональ выпрямительного моста 16 последовательно с исполнительными органами 14 и 15, а также блокирует поджиг тиристора форсировки 11 воздействием на формирователь 8. Такой переворот фазы может возникать при изменении уставки задания параметра с высшего на низший и объясняется тем, что мост может иметь одно состояние баланса при разбалансах.в разных фазах по обе стороны от положения баланса. Вьоход демодулятора 7 .объединен с входом формирователя 8, вьлрабатывающего сигнал поджига тиристора форсировки 11 при определенном задаваемом уставкой (на фиг.1 не изображена), уровне сигнала рассогласования (фиг.б и 7, диагр.А). Это обеспечивает поджиг семистора 13 отрицательными импульсами и приложение напряжения питания к исполнительным органам 14 и 15 в полном заполнении синусоиды напряжения (фиг.6 и 7, диагр.Б) Формирователь 9, входом подключенный через блок 10 параметрической обратной связи к выходу генератора пилообразного напряжения б, срабатывает при уровне напряжения на входе MO (фиг.3-5 диагр. Б), вырабатывает при этом положительные импульсы поджига симистора 13 и служит для обеспечения широтно-импульсного регулирова ния. Блок 10 параметрической обратно связи обеспечивает шинтирование вход формирователя 9 после открывания симистора 13 посредством тиристора 18 Кроме того, при этом изменяются соетояния разогрева термочувствительног элемента 19, вследствие широтной модуляции включений симистора, и изменяется (корректируется) порог срабат вания формирователя 9 (фиг.2). Блок .10 обеспечивает упреждающее отклонение исполнительных органов при подходе регулируемого параметра к устав ке задания. Защитный диод,Д7 обеспечивает под ключение источника постоянного тока (-(-иf, общий) (на фйг.1 не показан) к триакам симистора 13 и поджиг тиристора 18 в блоке 10 обратной.связи с момента открывания симистора 13, когда его внутреннее сопротивление уменьшается вследствие прохождения тока нагрузки. Исполнительные органы 14 и 15, подключенные параллельно между собой и йоследовательно с симистором 13 через выпрямительныймост 16 к напряжению источника переменного тока, могут быть, например, соответственно, электромагнитным клапаном, измен:яющим поступление хладагента (паров азота) изменением сечения канала и вентилятором с регулируемым числом оборотов. Устройство работает следующим образом. Пусть задана температура задания Тл (фиг.2) посредством резистора 4. уставки задания (фиг.1). В пусковом режиме сигнал рассогласования, снимаемый с измерительной диагонали моста 1 до окрестности точки А (фиг.2), где возникает первое балансное состояние моста, максимальный. На выходе демодулятора 7 в пусковом режиме вырабатывается максимал ное напряжение, которое смещает пилообразное напряжение генератора б по вертикальному способу. Срабатыв ние формирователя 9 (точка Ма фиг.5, диагр,В) обеспечивает максимальное заполнение в кадре полупериода питаю щего напряжение (фиг.6, диагр.Б ) при соответствующей коммутации симис тора 13. В пусковом режиме (фиг.9) форсировки функционирует дополнител ная связь, обеспечиваемая тиристором форсировки 11, за счет которой происходит полное заполнение синусои ды (фиг.б, диагр.Б). Тиристор форсировки 11 находится в проводящем состоянии от положительного импульса, формируемого формирователем 8 в течение периода соответствующей амплитуды сигнала, формируемого демодуляторсм 7. Очевидно, что он находится в проводящем состоянии в течение всего пускового периода форсировки и обеспечивает включение симистора 13 отрицательным иг 1ульсом тока, так как анодом он соединен с триаками управляквдего электрода симистора 13, а катодом - с выходом операционного усилителя 20 и (ОУ), находящегося в минусовом состоянии, в течение пускового периода форсировки, то есть управляющий электрод симистора соединен через проводящий тиристор форсировки 11 и внутреннее сопротивление ОУ с минусовым источником питания. По окончании периода форсировки упомянутый тиристор переходит в непроводящее состояние при соответствующем уменьшении сигнала на выходе демрдулятора 7, а также с момента возникновения динамического состояния ОУ 20. Проводящее состояние симистора 13 в течение периода форсировки (фиг.8,9) обеспечивает действие максимальной гибкой обратной связи посредством включения тиристора 18 положительным шлпульсом, формируемым фазочувствительным выпрямителем 12 и суммирующимся с ним напряжением источника положительного напряжения +Un (фиг.1), которое, прикладывается к управляющему электроду тиристора 13. На анод этого тиристора поступает пилообразное напряжение с выхода генератора б, которое суммируется в генераторе с напряжением демодулятора 7 (фиг.5), а катод тиристора 18 соединен с шиной общий. Включение тиристора 18 обеспечивает максимальный разогрев термочувствительного элемента 19 током тиристора и обеспечивает упомянутое минусовое состояние ОУ 20, настроенного так, что потенциал на его инвертирующем, входе превышает потенциал Неинвертирующего за счет падения напряжения на резисторе, которое обеспечивается втекающим током ОУ. В закрытом состоянии тиристора 18 ОУ 20 также находится в минусовом состоянии до момента, когда пилообразное напряжение генератора б не достигнет порога срабатывания Ucp в точке MO (фиг.5,4,3) и ОУ переходит в плюс-состояние. Фазочувствительный вьшрямитель 12 обеспечивает статическое минус-состояние ОУ на период форсировки при открытом тиристоре форсировки 11, а когда он включается от уменьшения сигнала разбаланса моста 1 при приближении к первсжу балансному состоянию в точке А (фиг.2), симистор 13 переходит из статического включенного состояния в дина.мическое. От этого также в динамическое состояние переходит тиристор 18 и ОУ 20 при срабатыва.ниях по достижению пилообразным напряжением порога срабатывания UCP(Фиг,5,4,3). Осуществляется режим широтно-импульсного регулирования с уменьшением скважности включения при приближении сигнала разбаланса моста 1 к балансному . . состоянию. Соответственно изменению скважности включений в диапа эоне 0 К 1, где К - скважность включения, а соответствует периоду форсйровки, изменяется и действие гибкой обратной .связи.
Из максимально разогретого состо нйя в период форсйровки (фиг.8,9) в момент прихода температуры объекта к первому балансному состоянию моста 1 в точке А (фиг.2) термочувствительный элемент 19 оказывается в состоянии некоторого: инерционного разогрева. По мере его остывания в связи с уменьшением скважности включений тиристора 18 изменяется его сопротивление в сторону увеличения (если отрицательный ТКЕ). Падение напряжения на нем увеличивается от втекающего тока (+) .входа ОУ (малого по сравнению с.током открытого тиристора 18) Это приближает потенциал (+)-входа ОУ к потенциалу (-)- входа.
Когда потенциалы от втекающих токов на обоих входах ОУ сравняются (фиг.З) и в дальнейшем произойдет . некоторое лре;вышение потенциала на (-)-входе, динамическое состояние, ОУ в области широтно-иМпульсного управления со скважностью прекращается и ОУ перез рдит в минус-состояние при . В области последова тельных балансных состояний моста 1 (A...Af,) сигнал разбаланса ввиду меньшего значения по сравнению с максимальным сигналом форсйровки не может обеспечить включения тиристора форсйровки il посредством формирователя 8 и -соответствующего включения симистора 13 отрицательным импульсом (сими:стор коммутируется в отличие от тиристора как положительными, так и отрицательными токовыми импульсами по управляющему электроду). Прохождение отрицательного импульса при закрытом тиристоре форсйровки 11 блокируется диодом 21, пропускающим только положительный импульс.
Нулевая сквожность включений ОУ соответствует балансному,состоянию моста 1 при соответствующих состояниях термочувст:вительного элемента 19, которые, вСВОЮ очередь определяются величиной сигнала рассогласования и тем, насколько близко температура объектарегулирования соответствует температуре уставки. Это определяет и вязкое демпфирование, если теплопотери объекта изменяются от возмущающих факторов изменения массы, озртаждения и так далее: при малых рассогласованиях фактор действия обратной связи незначительный. При увеличении рассогласования действие обратной связи интенсивно увеличивается и, наконец, имеет место режим форсйровки со скважностью
. Такой характер гибкой обратной связи определяет также малое ( либо нулевое ) перерегулирование стабилизируемого технологического параметра, например тока луча электронно-лучевого испарителя вакуумных покрытий. Так, если цепь с током луча подключена к измерительной диагонали моста 1, в одно из плеч которого подключен, например, стабилитрон, то
имеет место модуляция этого тока
переменным напряжением и соответст- вующая стабилизация тока луча воздействием исполнительным органом -симистором на возбудитель
тока луча регулируемым нагревом
нити накала возбудителя, либо регу,лированием тока плазмы. Это регулирование осуществляется с гибкой внутренней обратной связью согласно
описанию аналогично тому, как это осуществляется в прототипе, но с существенной разницей в том, что воздействие гибкой внутренней обратной связи не связано с датчиком. Таким образом. Обеспечивается возможность расширить диапазон использования устройства, принятого за прототип, так как отпадает необходимость использования в качестве датчика температуры одних только
термосопротивлений, имеющих низкий диапазон рабочих температур, увеличивается точность регулирования при изменяющихся нетемпературных параметрах объекта регулирования Это выгодно
отличает предлагаемое устройство от прототипа, обеспечивая возможность высокоточ,ного регулирования ряда процессов. Форсировка, обеспечиваемая устройством с возможностью ее
регулировки., (фиг. 8 и 9) повышает скорость отработки рассогласования и обеспечивает существенный зкон,омический эффект.
Универсальность регулирования с
возможностью следя1дего режима устройства, также выгодно отличает предлагаемое устройство от прототипа.
Использование одного генератора пилообразного напряжения упрощает настройку в сравнении с прототипом.
Формула изобретения
1. Устройство для регулирования тех 60 нологических параметров, содержащее последовательно соединенные компенсационный мост с датчиком параметра ,в одном из плеч, демодулятор и генератор пилообразного напряжения,к второму входу которого .подключен синхронизатор постоянного.н переменного тока выпрямительный диодный мост, последовательно соединенный симистор и Htiполнительные органы, о т л и ч а rain е ё с я тем, что, с целью расширения функциональных возможностей, устройство содержит тиристор форсировки и последовательно соединенные фазочувствительный выпрямитель и блок параметрической обратной связи, второй вход которого подключен к выходу генератора пилообразного напряжения , а первый выход - к входу первого формирователя импульсов, содержащего последовательно соединенные операционный усилитель и диод, встреч но-параллельно диоду включен тиристор форсировки, управляющий электрод Которого подключен к выходу второго формирователя, входы которого подключены к выходу демодулятора и второму выходу фазочувствительного выпрямителя соответственно, последовательно соединенные симистор и исполнительные элементы включены в диагональ выпрямительного моста, подключенного к источ ;Нику переменного тока, управляюсаий электрод симистора подключен к выходу первого формирователя импульсов, анод и катод - к второму выходу и
третьему входу блока параметрической обратной связи соответственно.
2, Устройство ПОП.1, отличающееся тем, что блок параметрической обратной связи содержит защитный диод, термозависимый элемент, тиристор и последовательно соединенные ограничительные резисторы, включенные между управляющим электродом и катодом тиристора, который связан с общим проводом, а анод тиристора с первым выводом термозависимого элемента, причем первый вход блока параметрической обратной связи соединен с управляющим электродом тиристора, второй в.ход - с вторым выводом термрзависимого элемента, третий, вход - с точкой соединения ограничительных резисторов, первый выход с анодом тиристора, а второй выход с катодом защитного диода, анод которого подключен к источнику положительного напряжения
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 4639,53, кл. G 05 D 23/24, 1971.
2.Авторское свидетельство СССР 662918, кл. G 05 D 23/24, 1976. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор температуры | 1980 |
|
SU883880A1 |
| Устройство для регулирования температуры | 1976 |
|
SU662918A1 |
| Цифровое устройство для коммутации симистора | 1982 |
|
SU1039005A1 |
| Следящий электропривод для разметки шкал | 1984 |
|
SU1228071A1 |
| Автоматический регулятор возбуждения для синхронной машины | 1981 |
|
SU1020954A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Устройство для частотно-фазовой стабилизации вакуума | 1981 |
|
SU1067254A1 |
| Устройство для регулирования облучения | 1988 |
|
SU1612275A1 |
| Устройство для управления трансформаторами с магнитной коммутацией | 1977 |
|
SU743156A1 |
| Импульсный регулятор | 1977 |
|
SU737918A1 |