(54) МАГНИТО-ТРАНЗИСТОРНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный магнито-транзисторный датчик | 1976 |
|
SU596992A1 |
| Амперметр действующего значения электрического тока | 1976 |
|
SU789785A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНО-ФАЗОВОГО УПРАВЛЕНИЯ т-ФАЗНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1969 |
|
SU436429A1 |
| Датчик оборотов | 1977 |
|
SU664100A1 |
| Датчик угловой скорости | 1981 |
|
SU991305A1 |
| В П Т Б | 1973 |
|
SU395781A1 |
| Преобразователь линейного перемещения в код | 1981 |
|
SU963039A1 |
| УСИЛИТЕЛЬ ПОСТОЯННОГО ТОКА | 1971 |
|
SU298045A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ТЕМПЕРАТУРЫ МАСЛА В ТУРБОМУФТАХ | 1970 |
|
SU284361A1 |
| Двухтактный транзисторный инвертор | 1985 |
|
SU1316071A2 |
1
Изобретение относится к автоматическому контролю положения вращающегося объекта, в частности к устройствам для индикации положения ротора двигателя, и может ыть использовано в качестве датчика положения ротора вентильной машины. Известен индуктивный датчик положения ротора, содержащий в качестве чувствительных элементов насыщающиеся сердечники, согласующий трансформатор, усилительдемодулятор на транзисторах, ключ-выпрямитель, конденсатор и сигнальный элемент 1 .
Недостатками этого датчика являются его невысокие чувствительность и точность.
Наиболее близким по технической сущности к изобретению является магнито-транзнсторный датчик углового положения, содержащий блокинг-генератор, выполненный на транзисторе, неподвижный элемент которого представляет собой Ш-образный сердечник с обмотками, одиа из которых включена в коллекторную, а другая, двухсекционная - в базовую цепи транзистора, и подвижные элементы, расположенные на валу 2.
Недостатками такого датчика также являются невысокие точность и чувствительность.
Цель изобретения - повышение точности и чувствительности датчика.
5 Поставленная цель достигается тем, что в датчик, содержащий основной блокинггенератор с неподвижным и подвижным ферромагнитными элементами магнитной цепи и вал, на котором расположены подвижные ферромагнитные элементы магнит ° ной цепи, введены модулятор и дополнительные блокинг-генераторы, соединенные параллельно с основным к общей точке которых подключен модулятор, подвижные ферромагнитные элементы магнитной цепи
15 основного блокинг-генератора являются общими для всех блокинг-генераторов, а неподвижные ферромагнитные элементы блокинг-генераторов расположены по .окружности в плоскости размещения подвижных ферромагнитных элементов.
20
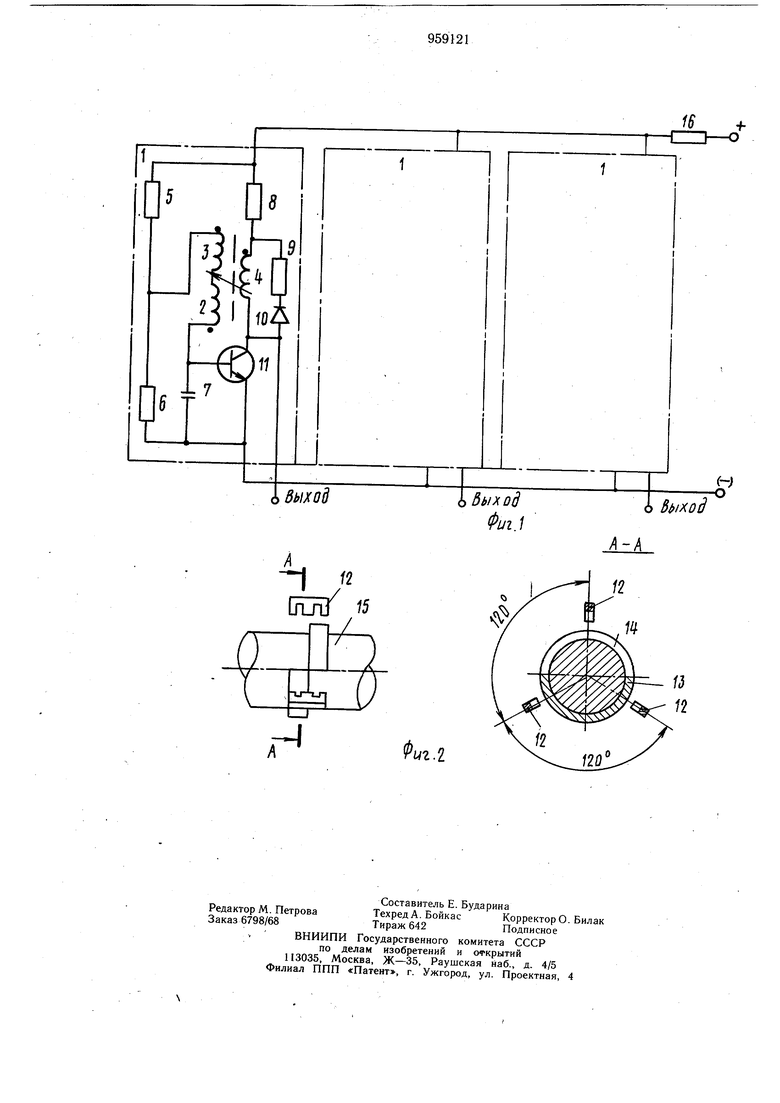
На фиг. 1 изображена схема магнитотранзисторного датчика углового положенияна фиг. 2 - пример расположения подвижных и неподвижных ферромагнитных элементов.
Предлагаемый датчик содержит блокинргенераторы 1, каждый из которых состоит из обмотки 2 положительной обратной связи, обмотки 3 отрицательной обратной связи, обмотки 4, резисторов 5 и б,конденсатора 7, резисторов 8 и 9, диода 10, транзистора 11 и неподвижного ферромагнитного элемента 12 магнитной цепи, неподвижные ферромагнитные элементы 13 и 14 магнитной цепи, вал 15 и модулятор 16 (может быть выполнен на резисторе), который служит для модуляции постоянного напряжения питания высокочастотной переменной составляющей.
Обмотки 2 и 3 обратной связи расположены на крайних стержнях Ш-образного сердечника, являющегося неподвижным ферромагнитным элементом 12 (фиг. 2), а на среднем стержне того же сердечника находится обмотка 4.
Подвижные элементы 13 и 14 представляют собой ферромагнитные полукольца, расположенные на валу 15 так, что при его вращении поочередно частично перекрывают зазор между средним стержнем элемента 12 и одним из его крайних стержней.
Количество блокинг-генераторов 1 определяется необходимой точностью преобразования.
Датчик работает следующим образом.
При вращении вала 15 элементы 14 и 13 поочередно частично перекрывают воздущный зазор между одним из крайних и средним стержнем элемента 12, что приводит к возникновению в блокинг-генераторе 1 либо положительной о атной связи, либо отрицательной. Допустим, что действует отрицательная обратная связь по переменному току. Транзистор 11 открыт током от источника питания через резисторы 5, модулятор 16, обмотки обратной связи 3 и 2, переход база-эмиттер транзистора 11.
Сигналы на выходе блокинг-генератора 1 отсутствуют.
Для перевода блокинг-генератора 1 в режим релаксации при повышенных требованиях к точности и чувствительности датчика необходимо в его обмотках 2, 3 и 4 создавать принужденные высокочастотные пульсации токов. В этом случае режим релаксации блокинг-генератора 1 начинается после установления положительной обратной связи по переменному току с задержкой не более одного периода частоты колебаний модулятора 16.
В предложенном датчике модулятором 16 является резистор, последовательио включенный между общей точкой блокинг-генераторов 1 и Источником постоянного напряжения (на фиг. 1 не показан). Поскольку элементы 12 расположены по окружности, а подвижные ферромагнитные элементы 13 и 14 представляют собой полукольца, то в любой момент времени в режиме релаксации
находится, по крайней мере, один блокинггенератор 1. Суммарная нагрузка датчика, а значит и падение напряжения на модуляторе 16 всегда имеет переменную составляющую, которая приводит к пульсациям токов в обмотках 2, 3 и 4 тех блокинггенераторов 1, где в данный момент действует отр|1цательная обратная связь по переменному току.
Частота релаксации блокинг-генераторов 1 составляет более 10 Гц, поэтому
точность датчика достаточно высока.
Перестраивая модулятор 16, а значит амплитуду пульсаций переменной состав ляющей напряжения источника питания, можно добиться максимальной чувствительности датчика.
Рабочие сигналы, представляющие собой серии высокочастотных импульсов, по форме близких к прямоугольным, снимаются с коллекторов транзисторов блокинг-генераторов 1.
Формула изобретения
0 Магнито-транзисторный датчик углового положения, содержащий основной блокинггенератор с неподвижным и подвижным ферромагнитными элементами магнитной цепи и вал, на котором расположены подвижные ферромагнитные элементы магнитной цепи,
5 отличающийся тем, что, с целью повыщения точности и чувствительности датчика, в него введены модулятор и дополнительные блокинг-генераторы, соединенные параллельно с основным, к общей точке которых подключен модулятор, подвижные ферромагнитные элементы магнитной цепи основного блокинг-генератора являются общими для всех блокинг-генераторов, а неподвижные ферромагнитные элементы расположены по окружности в плоскости размещения
5 подвижных ферромагнитных элементов.
Источники информации, принятые во внимание при экспертизе
№ 596992, кл. G 08 С 9/04, 1976 (прототип).
н
П
Фиг.г
