(54) ЗЕРНОУБОРОЧНЫЙ КОМБАЙН
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖАТКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2011 |
|
RU2477599C1 |
| Самоходный зерноуборочный комбайн | 1987 |
|
SU1498425A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР ЗАГРУЗКИ МОЛОТИЛКИ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1969 |
|
SU250577A1 |
| Механизм автоматического регулирования скорости вращения мотовила или барабана подборщика зерноуборочного комбайна | 1976 |
|
SU634709A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЗАГРУЗКИ САМОХОДНОГО ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1968 |
|
SU221409A1 |
| ПИТАТЕЛЬ МОЛОТИЛКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2003 |
|
RU2233065C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2010 |
|
RU2414114C1 |
| Пальчиковый битер жатки зерноуборочного комбайна | 1979 |
|
SU884615A1 |
| Наклонная камера зерноуборочного комбайна | 1988 |
|
SU1510762A1 |
| МОТОВИЛО | 2000 |
|
RU2179795C2 |
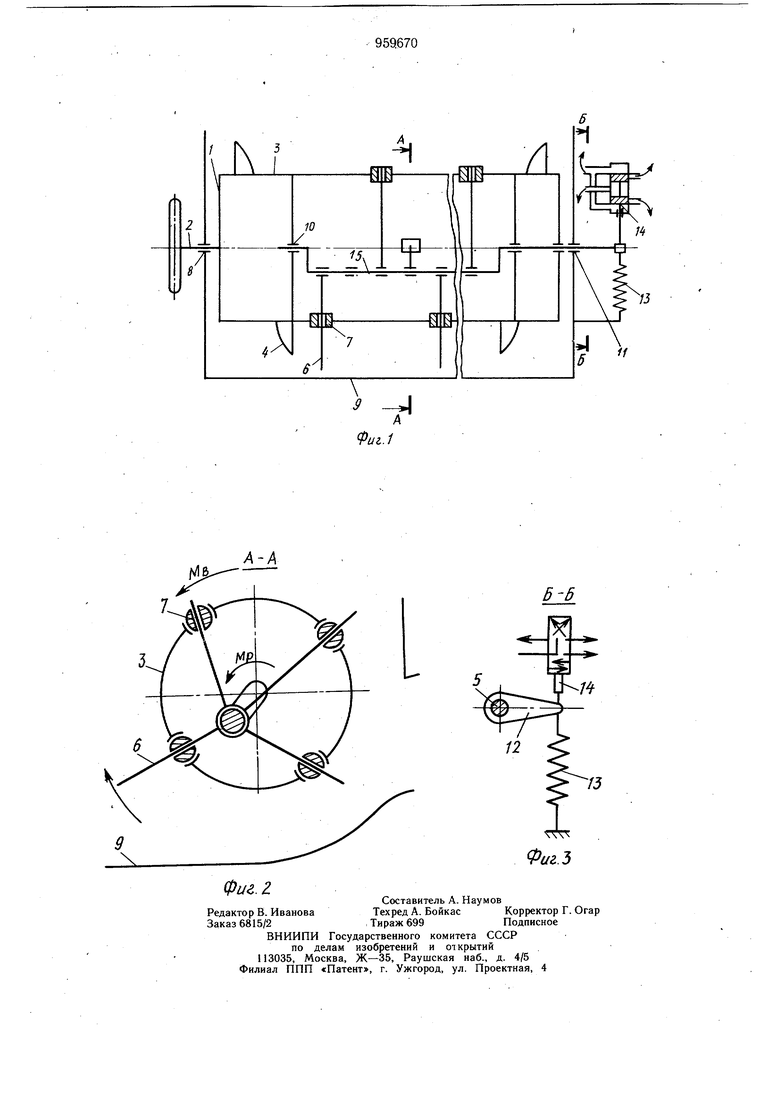
Изйбретенне относится к сельскохозяйственному машиностроению и касается главным образом конструкции самоходных комбайнов. , Известны зерноуборочные комбайны с устройствами для автоматического регулирования скорости движения самоходного зерноуборочного комбайна в зависимости от изменения нагрузки, включающие золотник, гидроцилиндр и механизм для изменения поступательной скорости комбайна 1. Недостатком известных устройств автоматического регулирования скорости зерноуборочного комбайна является сложность конструкции датчиков и плохое учитывание ими массы недействительной плотности растений, поступающих в молотилку или измельчитель. . Известен также зерноуборочный комбайн, включающий ходовую часть с вариатором скорости движения, гидроцилиндр управления вариатором, шнек жатки, в средней части которого содержится пальчиковый механизм, установленный на коленчатой оси 2. Недостатком такого зерноуборочного комбайна является то, что автоматические регуляторы загрузки молотилки (АРЗМ) на комбайнах типа СК-5 «Нива и СК-6 «Колос регулируют поступательную скорость машин в зависимости от толщины хлебной массы в наклонной камере, расположенной непосредственно перед молотилкой. При этом не учитывается плотность хлебной массы, ее влажность и засоренность. В результате при изменении влажности и засоренности хлебной массы режим нормального функционирования АРЗМ не обеспечивает нормальную работу молотилки комбайнов. При увеличении влажности и засоренности хлебов (т. е. при увеличении физической массы хлебов) молотилка забивается, недомолачивает поступающую культуру, а при работе в более легком режиме дробит зерно, сообщая им микротрещины, снижает посевные качества получаемых семян. Цель изобретения - автоматическое регулирование загрузки комбайна в зависимости от веса поступающей массы. Указанная цель достигается тем, что один из концов коленчатой оси снабжен радиальным рычагом, который связан посредством пружины с опорой и соединен со штоком золотника гидроцилиндра управления вариатором скорости движения комбайна. На фиг. 1 изображен шнек жатки, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Шнек жатки включает диск 1 с приводным валом 2, боковую часть 3 цилиндра с закрепленной на ней спиральной лентой 4, пальчиковый механизм, состоящий из коленчатой оси 5 и шарнирных пальцев 6, проходящих, через глазки 7, установленные на боковой части 3 шнека шарнирно. Приводной вал 2 жестко связанный с диском 1, установлен на подшипнике 8 корпуса жатки 9, а конец коленчатого вала 5 с одной стороны установлен на подшипнике 10, а с другой - на подшипнике 11 корпуса жатки 9 и посредством рычага 12 связан с пружиной 13 и штоком 14 золотника гидроцилиндра. При этом конец пружины 13 и корпус золотника 15 связаны с корпусом жатки 9. Шнек работает следующим образом. Вращение от приводного вала 2 через диск 1 на боковую часть 3 шнека и через глазки 7 передается на пальцы 6. При этом спиральная лента 4 с боков жатки собирает растительную массу и передает пальчиковому механизму. Перемещаемая растительная масса на концах пальцев 6 пальчикового механизма создает определенное сопротивление MC, противонаправленное моменту вращения MB и через коленчатую ось 5 и рычаг 12 передается пружине 13 и штоку 14 золотника. При выбранном натяжении и жесткости пружины 13 происходит пропорциональное моменту сопротивления MC передаваемой пальцами 6 растительной массы перемещение штока 14 золотника, которое зависит от массы и фактической плотности растеНИИ на пальцах 6 пальчикового механизма Шнека. В результате представляется возможным автоматическое регулирование поступательной скорости зерноуборочного комбайна и загрузки его молотилки или измельчителя. При этом достигается лучшая производительность, качество зерна убираемой культуры и меньшие затраты энергии. Кроме того, при установке датчика на жатке увеличивается промежуток времени на переходные режимы комбайна (и элементов САР) из одной скорости на другую, чем при установке датчика на наклонной камере молотилкой. Все это позволяет повысить производительность зерноуборочного комбайна, уменьшить потери зерна, особенно при обмолоте влажных и засоренных хлебов. Формула изобретения Зерноуборочный комбайн, включающий ходовую часть с вариатором скорости движения комбайна, гидроцилиндр управления вариатором, шнек жатки, в средней части которого содержится пальчиковый механизм, установленный на коленчатой оси, отличающийся тем, что, с целью автоматического регулирования загрузки комбайна в зависимости от веса поступающей массы, один из концов коленчатой оси снабя ен радиальным рычагом, который связан посредством пружины с опорой и соединен со штоком золотника гидроцилиндра управления вариатором скорости движения комбайна. Источники информации принятые во внимание при экспертизе 1.Шеповалов В. Д. Автоматизация уборочных процессов М., «Колос, 1978. 2.Самоходные комбайны «Нива. Техническое описание и инструкция по эксплуатации. Ростов-на-Дону, Северо-Кавказский межотраслевой центр научно-технической информации, 1977 (прототип).
