(54) ПРИВОД МОДУЛЯ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2578400C1 |
| СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ КОРОБКОЙ ПЕРЕДАЧ И СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1986 |
|
SU1389170A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО КАРЬЕРНОГО ТРАНСПОРТА | 1992 |
|
RU2031025C1 |
| ТОПЛИВНЫЙ НАСОС ВЫСОКОГО ДАВЛЕНИЯ | 2010 |
|
RU2537994C2 |
| КЛАПАННАЯ СИСТЕМА АВАРИЙНОГО ОТКЛЮЧЕНИЯ | 2006 |
|
RU2319054C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2609558C1 |
| Тормозной привод прицепа | 1990 |
|
SU1781108A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2248284C1 |
| Рекуперативно-пневматический тормоз железнодорожного вагона | 1990 |
|
SU1733291A1 |
1
Изобретение относится к механизации и автоматизации вспомогательных технологических операций и может быть использовано в промышленных работах.
Известна конструкция пневматического цилиндра двухстороннего действия с тор- 5 мозиым устройством, содержаш.ая пневмоцилиндр с поршнем, образующий полости, сообщенные с воздухораспределителем посредством магистралей, на каждой из которой установлен размещенный в кор- ю пусе подпружиненный золотник, образующий совместно с корпусом управляющую и рабочую полости, связанные системой каналов с полостями пневмоцилиндра 1 .
Недостатком этой конструкции является то, что изменение условий ее работы не 5 может быть компенсировано настройкой включения тормозного золотника в процессе работы, что приводит к необходимости ограничения максимальных скоростей перемещения, а это снижает эксплу- 2о атациоиные качества устройства в целом.
Цель изобретения - повышение эксплуатационных качеств привода модуля промышленного робота путем оптимизации динамических характеристик процесса торможения.
Поставленная цель достигается тем, что в корпусе золотника выполнены дополнительные отверстия, обеспечивающие постоянное сообщение рабочей и периодическое управляющей полостей золотника с полостью пневмоцилиндра.
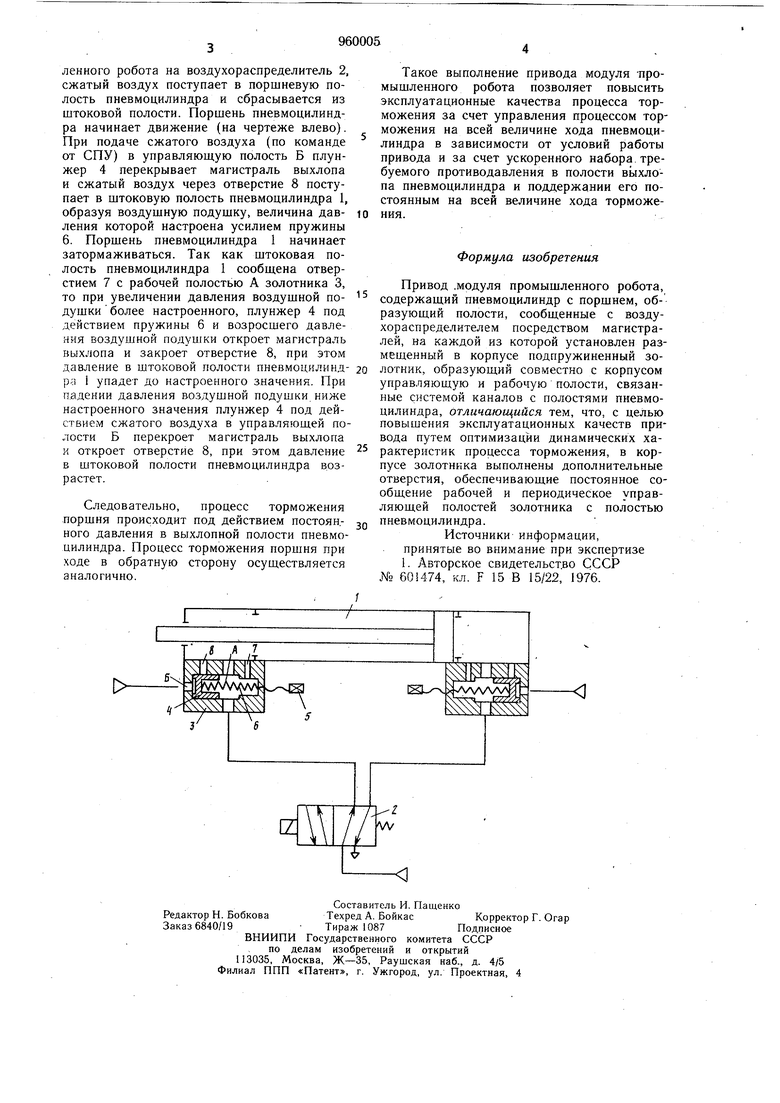
На чертеже представлен привод модуля промышленного робота.
Привод состоит из пневмоцилиндра 1, полости которого сообщены с воздухораспределителем 2 посредством магистралей, к каждой из которой подключен золотник 3 с плунжером 4. В корпусе золотника установлен винт 5 регулирующий усилие пружины 6, поджимающей плунжер 4. Рабочая полость А золотника 3 соединена отверстием 7, а управляющая полость Б - отверстием 8 с пневмоцилиндром 1.
Привод работает следующим образом.
В исходном положении под действием пружин 6 плунжеры 4 находятся в крайних положениях и магистрали полностью открыты. При подаче сигнала от системы .программного управления (СПУ) промыш
