Изобретение относится к машиностроению, в частности к робототехнике, и может найти применение при создании роботов с поступательным перемещением элементов.
Целью изобретения является упрощение конструкции модуля и повышение надежности за счет обеспечения работы в следящем режиме и остановки исполнительного органа в любой точке, заданной профилем кулачка, а также уменьшения числа дополнительных гидроцилиндров, управляющих клапанов и ликвидации устройства подпитки обратной связи.
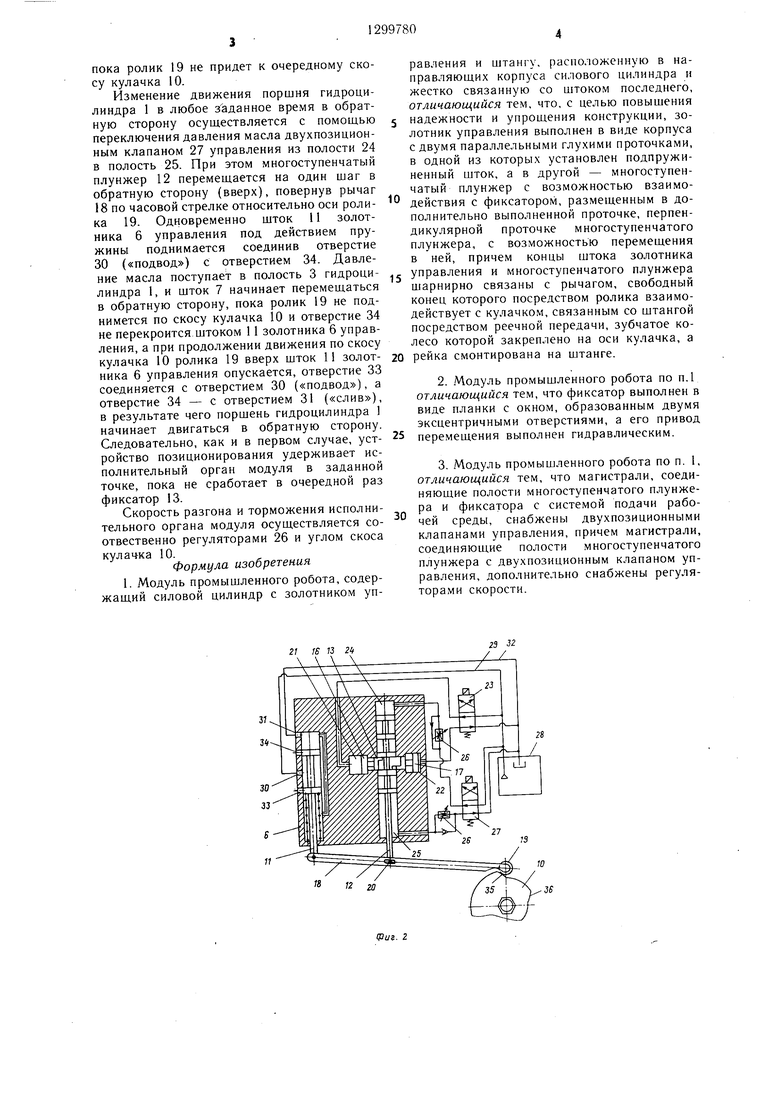
На фиг. 1 показан модуль, общий вид; на фиг.2 - схема устройства управления; на фиг.З - фиксатор, разрез; на фиг.4 - то же, план.
Модуль промышленного робота состоит из силового цилиндра, например гидроцилиндра 1, рабочие полости 2 и 3 которого соединены через трубопроводы 4 и 5 с золотником 6 управления, а щток 7 жестко связан со штангой 8, на которой смонтирована зубчатая рейка реечной передачи. На корпусе цилиндра 1 закреплено находящееся в зацеплении с зубчатой рейкой, выполненной на щтанге 8, зубчатое колесо 9 с жестко связанным с ним кулачком 10. Золотник б управления выполнен в виде корпуса с двумя параллельными глухими проточками, в одной из которых установлен подпружиненный шток 11, а в другой - многоступенчатый плунжер 12, взаимодействую- 1ций с фиксатором 13, выполненным в виде планки с окном, образованным двумя эксцентричными отверстиями 14 и 15 (фиг.З и 4). Фиксатор 13 установлен в дополнительно выполненной проточке, перпендикулярной проточке многоступенчатого плунжера с возможностью перемещения в ней посредством поршней 16 и 17. Золотник 6 управления снабжен рычагом 18, один конец которого и средняя часть его шарнирно связаны соответственно с концами подпружиненного штока 11 и многоступенчатого плунжера 12, а другой конец рычага 18 снабжен роликом 19, взаимодействующим с кулачком 0. Средняя часть рычага 18 взаимодействует с многоступенчатым плунжером 12 посредством шарнира 20.
Замкнутые полости 21 и 22 поршней 16 и 17 фиксатора 13 подсоединены через двухпозиционный клапан 23 управления, а полости 24 и 25 многоступенчатого плунжера 12 через регуляторы 26 скорости и двухпозиционный клапан 27 управления - к напорной магистрали маслостанции 28. Подвод масла осуществляется по трубопроводу 29 к отверстию 30 («подвод) золотника 6 управления, отверстие 31 («слив) соединено через трубопровод (магистраль) 32 с баком маслостанции. Отверстия 33 и 34 золотника 6 управления соединены через трубопроводы (магистрали) 4 и 5 соответстенно с рабочими полостями 2 и 3 гидроцилиндра 1.
Модуль промышленного робота работает следующим образом.
Масло, нагнетаемое маслостанцией 28 по трубопроводу 29, подается в отверстие 30
(«подвод) золотника 6 управления и через двухпозиционный клапан 23 управления - к полости 21 фиксатора 13, а через двухпозиционный клапан 27 управления - к полости 24 многоступенчатого плунжера 12. При подаче управляющего сигнала (напряжения)
на двухпозиционный клапан 23 управления полость 22 фиксатора 13 соединяется с напорной магистралью, а полость 21 - со сливной, следовательно, поршень 17 перемещает фиксатор 13 в левое крайнее положение, а многоступенчатый плунжер 12 под действием напора масла в полости 24 опускается по верхнему отверстию фиксатора 13, при этом шарнир 20 рычага 18 перемещается вниз на один щаг, следовательно, рычаг 18 совершает поворот против часовой стрелки относительной неподвижной оси ролика 19 на определенный угол. Шток золотник 11, сжимая пружину, опускается. Отверстие 30 («подвод) соединяется с отверстием 33, а отверстие 34 - с отверстием 31 («слив). Давление масла через трубопровод 4 поступает в полость 2 гидроцилиндра 1. Поршень гидроцилиндра 1 начинает перемещаться вправо, а с ним и зубчатая рейка 8, жестко связанная со штоком 7 гидроцилиндра 1. При движении зубчатой рейки 8 зубчатое колесо 9, входящее в зацепление
с зубчатой рейкой 8, начинает вращаться против часовой стрелки. Движение поршня осуществляется до тех пор, пока ролик 19 не придет из точки 35 скоса кулачка 10 в точку 36, а шток золотника 1I - в исходное положение, когда отверстия 33 и 34
перекрыты. В случае продолжения движения порщня гидроцилиндра 1 ролик 19 продолжает опускаться по скосу кулачка 10, а щток 11 - подниматься, соединяя отверстие 30 («подвод) с отверстием 34, а отверстие 31
(«слив) - с отверстием 33. Давление масла по трубопроводу 5 поступает в полость 3 гидроцилиндра 1 и поршень перемещается в обратную сторону, а ролик 19 возвращается в точку 36 кулачка 10.
Таким образом, устройство удерживает
исполнительный орган модуля в заданной точке, пока система управления не снимает сигнал (напряжение) с двухпозиционного клапана 23 управления и фиксатор 13 не переместится в правое крайнее положение.При перемещении фиксатора 13 в крайнее правое
положение третий буртик (снизу) многоступенчатого плунжера 12 начинает опускаться по отверстию 15 фиксатора 13, пока четвертый буртик не опрется на верхнюю плоскость фиксатора 13, многоступенчатый плунжер 12 совершает еще один шаг, переместив шток 11 золотника 6 управления в крайнее нижнее положение. Масло снова поступает в полость 2 гидроцилиндра 1 и поршень продолжает перемещение вправо.
пока ролик 19 не придет к очередному скосу кулачка 10.
Изменение движения поршня гидроцилиндра 1 в любое заданное время в обратную сторону осуществляется с помощью переключения давления масла двухпозицион- ным клапаном 27 управления из полости 24 в полость 25. При этом многоступенчатый плунжер 12 перемещается на один шаг в обратную сторону (вверх), повернув рычаг 18 по часовой стрелке относительно оси ролика 19. Одновременно шток И золотника 6 управления под действием пружины поднимается соединив отверстие 30 («подвод) с отверстием 34. Давление масла поступает в полость 3 гидроцилиндра 1, и щток 7 начинает перемещаться в обратную сторону, пока ролик 19 не поднимется по скосу кулачка 10 и отверстие 34 не перекроится щтоком 11 золотника 6 управления, а при продолжении движения по скосу кулачка 10 ролика 19 вверх щток 11 золотника 6 управления опускается, отверстие 33 соединяется с отверстием 30 («подвод), а отверстие 34 - с отверстием 31 («слив), в результате чего поршень гидроцилиндра 1 начинает двигаться в обратную сторону. Следовательно, как и в первом случае, устройство позиционирования удерживает исполнительный орган модуля в заданной точке, пока не сработает в очередной раз фиксатор 13.
Скорость разгона и торможения исполнительного органа модуля осуществляется со- отвественно регуляторами 26 и углом скоса
кулачка 10.
Формула изобретения
1. Модуль промыщленного робота, содержащий силовой цилиндр с золотником управления и штангу, расположенную в направляющих корпуса силового цилиндра и жестко связанную со штоком последнего, отличающийся тем, что, с целью повышения
надежности и упрощения конструкции, золотник управления выполнен в виде корпуса с двумя параллельными глухими проточками, в одной из которых установлен подпружиненный шток, а в другой - многоступенчатый плунжер с возможностью взаимодействия с фиксатором, размещенным в дополнительно выполненной проточке, перпендикулярной проточке многоступенчатого плунжера, с возможностью перемещения в ней, причем концы штока золотника
управления и многоступенчатого плунжера шарнирно связаны с рычагом, свободный конец которого посредством ролика взаимодействует с кулачком,связанным со штангой посредством реечной передачи, зубчатое колесо которой закреплено на оси кулачка, а
рейка смонтирована на штанге.
2. .Модуль промыщленного робота по п.1 отличающийся тем, что фиксатор выполнен в виде планки с окном, образованным двумя эксцентричными отверстиями, а его привод
перемещения выполнен гидравлическим.
3. Модуль промышленного робота по п. 1, отличающийся тем, что магистрали, соединяющие полости многоступенчатого плунжера и фиксатора с системой подачи рабочей среды, снабжены двухпозиционными клапанами управления, причем магистрали, соединяющие полости многоступенчатого плунжера с двухпозиционным клапаном управления, дополнительно снабжены регуляторами скорости.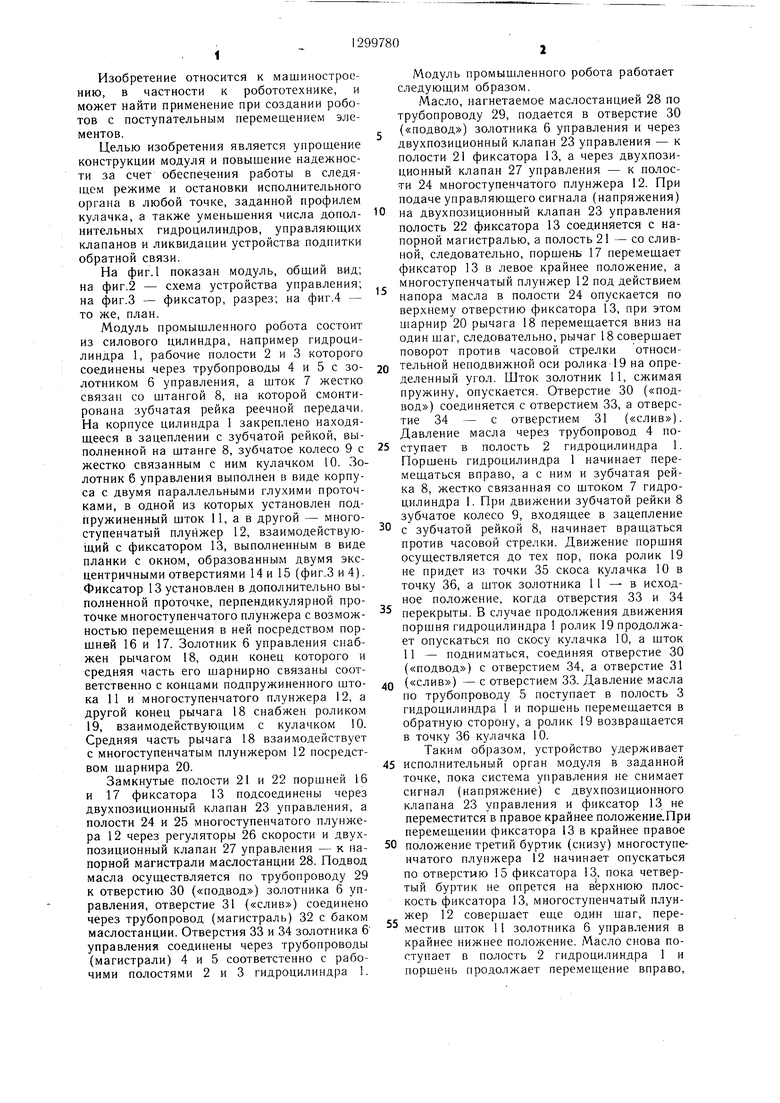
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство | 1981 |
|
SU1007964A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА И УСТРОЙСТВО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА | 2012 |
|
RU2493424C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА И УСТРОЙСТВО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА | 2012 |
|
RU2494277C2 |
| Гидравлическое устройство управления коробкой передач с двумя сцеплениями транспортного средства | 1983 |
|
SU1184702A1 |
| Роторно-конвейерная машина | 1983 |
|
SU1217741A1 |
| Шагающее транспортное средство | 1977 |
|
SU686930A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ КОЛЕС ПЕРЕДНЕЙ ОПОРЫ ШАССИ | 1992 |
|
RU2042575C1 |
| Вальцешлифовальный станок для обработки валков в собственных подшипниках | 1975 |
|
SU556029A1 |
| Способ образования скважин в грунте и устройство для его осуществления | 1989 |
|
SU1709054A1 |
| Гидравлический реверсивный механизм | 1984 |
|
SU1232456A1 |

Изобретение относитс я к области машиностроения и может найти применение в роботах с поступательным перемещением элементов. Целью изобретерния является повышение надежности при одновременном упрощении конструкции за счет обеспечения работы в следящем режиме и остановки исполнительного органа в любой точке, заданной профилем кулачка. Модуль промышленного робота содержит силовой цилиндр 1, шток 7 которого жестко связан со штангой 8, расположенной в направляющих корпуса силового цилиндра 1, и золотник управления 6. Золотник управления 6 выполнен в виде корпуса с двумя параллельными глухими проточками, в одной из которых установлен подпружиненный шток, а в другой - многоступенчатый плунжер, взаимодействующий с фиксатором, выполненным в виде планки с окном и установленным в дополнительной проточке, перпендику.лярной проточке многоступенчатого плунжера, с возможностью перемещения в ней. Причем концы подпружиненного штока и многоступенчатого плунжера щарнирно связаны соответственно с одним концом и средней частью рычага 18, а другой конец рычага 18 снабжен роликом 19, взаимодействующим с кулачком 10. Магистрали, соединяющие рабочие полости фиксатора и многоступенчатого плунжера с системой подачи рабочей среды, снабжены двухпозиционными клапанами управления, а магистрали, соединяющие полости многоступенчатого плунжера с двухпозиционным клапаном управле11ия, доиолнительно снабжены регуляторами скорости. 2 з.п.ф-лы, 4 ил. (Л 19 ю со ;о | оо фиг. 1
2/ rS 73 2«
18к
фиг.
| Модуль промышленного робота | 1978 |
|
SU730563A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
