Изобретение относится к электрог технике и может быть использовано в качестве электропривода в аппаратуре магнитной записи.
Известен лентопротяжный механизм, содержаний подающий узел, электродвигатель которого соединен с первым регулятором тока, ведущий узел, электродвигатель которого соединен с регулятором скорости, подсоединенным входом к датчику оборотов, сопряженному с валом электродвигателя ведущего узла, и приемный узел, электроддигатель которого соединён с вторым регулятором тока Cl.
Недостаток этого лентопротяжного механизма заключается в том, что он не обладает высокой надежностью работы в тяжелых механических условиях эксплуатации в широком диапазоне температур окружающей среды при использовании в нем малогабаритного ведущего электродвигателя
Наиболее близким техническим решением к предлагаемому является лентопротяжный механизм, содержащий подаю щий узел, электродвигатель которого первым выводом соеди1|ен с первой шиной питающего напряжения через первый регулятор тока, связанйый с
этой же шириной управляющим входом через первую схему управления, ведущий узел, электродвигатель которого подключен через парафазный усилитель мощности к выходам релейного регуляtopa скорости, подсоединенного входом к. датчику оборотов, сопряжейному с валом электродвигателя ведущего узла, и приемный узел, электродвига10тель которого выводом соединен с второй шиной питающего напряжения непосредственно, а вторым выводом - с первой шиной питающего напряжения через второй регулятор тока, под15соединенный управляющим входом к первому выводу второй схемы управления 2.
Недостатком известного лентопротяжного, механизма является низкая
20 надежность его работы в жестких механических и кинематических условиях эксплуатации. Например, при температуре окружающей среди ниже резко возрастает сопротивление трак25та лентопротяжного механизма протягиванию, магнитной ленты ведущим узлом. .
в результате в лентопротяжном меканизме малогабаритной аппаратуры
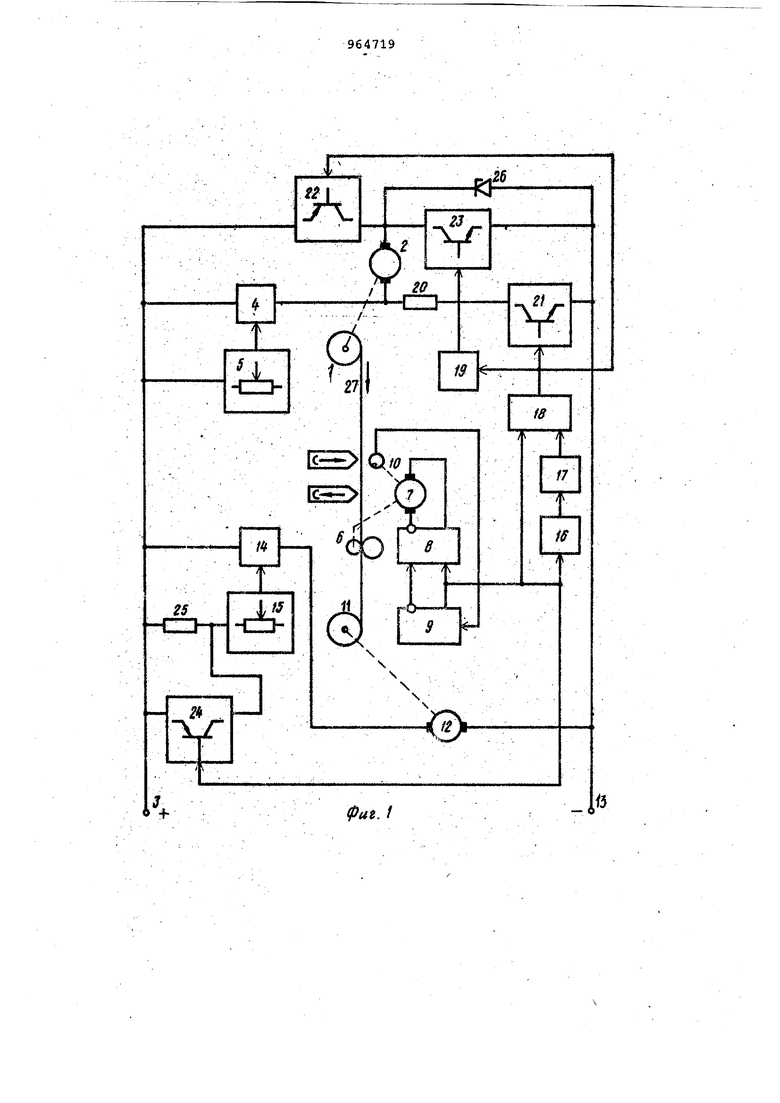
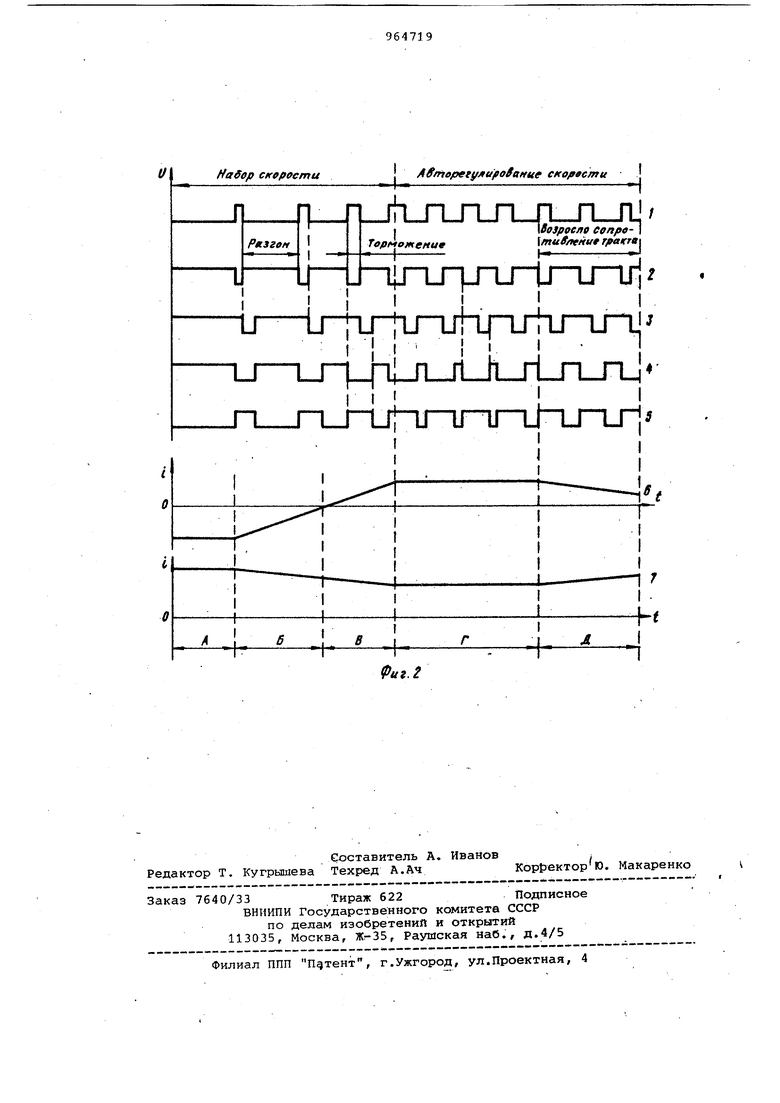
30 магнитной записи, собранном на малогабаритных и экономичных, но маломощных электродвигателях постоянндго тока, электродвигатель ведущего узла не в состоянии сам преодолеть возросшее сопротивление тракта лентопротяжного механизма, и движение магнитной ленты замедляется. Малогабаритный ведущий электродвигатель не имеющий существенного запаса по мощности, не обеспечивает также дос таточную устойчивость процесса тран портированйя магнитной ленты с необходимой стабильностью механичесКИМ воздействиям на аппаратуру. Целью изобретения является повышение надежности работы малогабарит ного лентопротяжного механизма. Поставленная цель достигается .тем, что в лентопротяжн й механизм дополнительно введены ограничительный и добавочный резисторы, первый, второй, третий и четвертый транзисг торные Ключи и последовательно вклю ченные ждущий мультивибратор, первый инвертор, схема совпадения, и второй инвертор, при этом электродв гатель подающего узла первым выводо соединен дополнительно с второй шиной питающего напряжения через последовательно включенные ограничительный резистор и первый транзисторный ключ, а вторым выводом - с первой шиной через второй транзисторный ключ и с второй шиной питающего напряжения через третий транзисторный ключ, один из выходов релейного регулятора скорости соедине с входом ждущего мультивибратора, вторым входом схемы совпадения и с управляющим входом четвертого транзисторного ключа, включенного параллельно добавочному резистору, че рез который свободный вывод второй схемы управления соединен с первой шиной питающего напряжения, выход схемы совпадения соединен дополните но с управляющими входами первого и :второго транзисторных ключей, а вых второго инвертора подключен к управляющему входу третьего транзисторного ключа. Нафиг. 1 изображена схема ленто протяжного механизма; на фиг. 2 временные диаграммы, поясняющие при цип работы лентопротяжного механизма. ,. Лентопротяжный механизм содержит подшощий узел 1, электродвигатель 2 которого первым выводом соединен с первой шиной 3 питающего напряжения (например, положительной ) через пер вый регулятор4 тока, связанный с шиной 3 управляющим входом через первую схему 5 управления, ведущий узел- б, электродвигатель 7 которого подключен через парафазный усилител 8 мощности к выходам релейного регулятора 9 скорости, подсоединенного входом к датчику 10 оборотов, сопряженного с валом электродвигателя 7, и приемный узел 11, электродвигатель 12 которого первым выводом соединен с второй шиной 13 питатния (например, отрицательной; непосредственно, а вторым выводом с первой шиной 3 через второй регулятор 14 тока, подсоединенный управляющим входом к первому выводу второй схемы 15 управления, последовательно включенные ждущий мультив21братор 16, первый инвертор 17, схема 18 совпадения и второй инвертор 19, электродвигатель 2 подающего узла 1 первым выввдом соединен дополнительно с второй шиной 13 питающего напряжения через последовательно включенные ограничительный резистор 20 и первый транзисторный ключ 21 и с второй шиной 13 питающего напряжения через третий транзисторный ключ 23,. один из выводов релейного регулятора 9 скорости соединен с входом ждущего мультивибратора 16, вторым входом схемы 18 совпадения и с управляющим входом четвертого транзисторного кпюча 24, включенного параллельно) добавочному резистору 25, через который второй вывод второй схемы 15 управления соединен с первой шиной 3 питающего напряжения, выход схемы 18 совпадения соединен с управляющими входами транзисторных ключей 21 и 22, а выход второго инвертора 19 подключен к управляющему входу третьего транзисторного ключа 23, стабилитрон 26, подключенный параллельно третьему транзисторному ключу 23. Электродвигатели 2, 7 и 12 обеспечивают необходимую скорость магнитной ленте 27. Лентопротяжный механизм работает следующим образом. В момент включения лентопротяжного механизма на прямом выходе (который соединен с управляющим входом транзисторного ключа 24, входом ждущего мультивибратора 16 и с одним из входов схемы.18 совпадения) релейного регулятора 9 скорости всегда устанавливается высокий пЬтенциал (началсР диаграммы 2, фиг. 2), а на его.другом, инверсномвыходе - нулевой уровень (начало диаграммы 1, фиг. 2). В результате в первый момент и, далее, в начале переходного режима - режима набора магнитной лен1ТОЙ 28 заданной скорости - включены (открыты) транзисторные ключи 24, 21 и 22, а транзисторный ключ 23 выключен (заперт). При наличии на входе ждущего мультивибратора 16 высокого потенциала (т.е. при отсутствии на его входе импульсного сигнала) сигнал на его выходе отсутст:вует и, следовательно, устанавливается высокий потенциал на выходе ийвертора 17 .(начало диаграммы 3,фиг. 2) и, что то же, на первом входе схемы 18 совпадения, на втором входе которой в это время VaKже присутствует высокий потенциал (с упомянутого прямого выхода релейного регулятора 9 скорости). Формируемый при этом высокий потенциал на выходе схешл 18 совпадения (начало диаграммы 4, фиг. 2 и открывает транзисторные ключи 21 и 22. Тре.буемре напряжение магнитной ленты 27 в подающей ветви (подающий 1 - ведущий узел 6 тракта лентопротяжного механизма и в приемной ветви (ведущий узел б - приемный узел 11) устанавливается соответствующей величиной тока в электродвигателях 2 и 12. .Основной ток электродвигателя 2 (диаграмма 6, фиг.2) регулируется при настройке и стабилизируется во время расботы лентопротяжно о механизма регулятором 4 тока. Ток. электродвигателя 12 (ддиаграм ia 7, фиг.2 регулируется и стабилизируется соответственно регулятором 14 тока. Для изменения тока электродвигателей 2 и 12 при настройке лентопротяжного механизма используются потенциометры схем 5 и 15 управления. Схемы 5 и 15 управления участвуют также в процессе стабилизации тока электродвигателей 2 и 12 во время работы лентопротяжного механизма. Ток электродвигателя 2 в основном режиме его работы - режиме ПодтормаживанИя подающей катушки с магнитной лентой - протекает по цепи: шина 3 питающего напряже ния - регулятор 4 тока - электродвигатель 2 - открытый транзисторный ключ 23 - шина 13 питакадего напряжения. .Средний номинальный рабочий ток электродвигателя 12 устанавливается при подключении схрмы 15 управления к шине 3 питающего напряжения через добавочный резистор 25. . . ..
В момент пуска лентопротяжного еханизма ив начале набора скорости ( начале набора ведущим электровигателем 7 номинальных оборотов) ключенный транзисторный ктпоч 24 закорачивает добавочный резистор 25, и ток через электродвигатель 2 протекат в обратном направлении (участок А диаграммы 6, фиг. 2 ) по цепи: ши-, на 3 : открытый транзисторный ключ; 22 - электродвигатель 2 - ограничи тельный резистор 20 -. открытый транзисторный ключ 21 - шина 13. Таким . ббразом, при пуске электродвигатель 12 приемного узла-11 получает приращение тока, например, на 30% относительно своего среднего рабочегхэ тока участок А диаграммы. 7, фиг. 2), a электродвигатель 2 подающего узла
1 вращается в противополоЗсную сторону. Т.е., электродвигатель 2 So (время не подтормаживает подающую катушку с магнитной лентойj а;, наоборот, помогает ей раскрутиться. Резистор 20 ограничивает ток транзисторных ключей 21 и 22.
Далее в процессе набора скорости начинает работать репейный регулятор 9 скорости (стабилизатор оборо10тов вращения ведущего электродвигателя 7). Во время работы релейного регулятора 9 скорости на его двух выходах формируются в противо-. фазе два. импульсных сигнала-(.Диаг5раммы 1, 2, фиг. 2, которые соответственно управляют двумя усилителями мощности парафазногЬ усилителя 8, При этом во время фазы разгона .ведущего электродвигателя 7 ток через его обмотку П1зотекает в одном
0 направлении, а при торможении ток в электродвигателе 7 имеет обратное .направление. Причем перектоочение с ,фазы разгона на фазу торможения электродвигателя 7 осуществляется
5 в моменты, когда частота сигнгша датчика 10 оборотов становится равной частоте опорного сигнала. В этом и заключается принцип стабили:зации оборотов ведущего электродви0 .гателя 7 релейной системой авторе.гулированйя. Во время движения магнитная лента 27 жестко связана с вапрм ведущего электродвигателя 7.
Высокий потенциал на.прямрм вы5 .ходе релейного регулятора 9 скорости (диаграмма 2, фиг. .2 ) соответствует фазе разгона ведущего электродвигателя 7, а нулевой уровень фазе торможения. Выходной импульс0ный сигнал релейного регулятора 2 скорости используется в предлагаемом лентопротяжном механизме дополнительно для управления электродвигателями подающего и приемного узлов.
5 f
Импульсный сигнал с прямого выхода релейного регулятора 9 скорости поступает без изменения временных интервалов на управлякяций вход транзисторного ключа 24.И с расширенны-
O Ми интервалами нулевого уровня (с расширенньпи1И отрицательными импуль|Сами - диаграмма 4, Фиг.2 на управ.апяющие входы транзисторных ключей Й1 и 22 (входной нулевой уровень их
5 ;з&пй ает) и через инвертор 19 на управляющий вход транзисторного ключа 23 (диаграмма 5, фиг. 2) . Благодаря использованш) инвертора 19 транiaHCTopHKie ключи 22 и 23 работают в
o противофазе. Каждым положительным 1Т1ёрепадом используемого выходного ймпуяьсного сигнала релейного регулятора 9 скорости запускается ждувдий мультивибратор 16. Проинвенти5рованвыё выходные импульсы ждущеГО мультивибратора 16 запирают на время citfoefl длительности схему 18 совпадения каждый раз сразу же после окончания отрицательных импульсов (диаграмма 2, фиг. 2) на его другом входе. Так осуществляется расширение интервалов с нулевым уровнем импульсного сигнала управляющего транзисторными ключами 21 и 22, Максимальная длительность выход ных импульсов ждущего мультивибратора 16 устанавливается. равной или меньше длительности самой короткой фазы разгона ведущего электродвигателя 7. Рассмотренное расширение интерва лов с нулевым уровнем необходимо, в частности, для того, чтобы в установившемся режиме работы лентопротяжного механизма в нормальных механических и климатических условиях эксплуатации транзисторный ключ 23 был почти все время открыт (участок Г диаграммы 5, фиг. 2), а транзисторные ключи 21 и 22 были почти все время закрыты. Этим обеспечивается включение импульсного управления (.питания) подающим электродвигателем 2 по выходному сигнал релейного регулятора .9 скорости тол ко.при возрастании сил сопротивления протягиванию магнитной ленты в тракте, когда ведущему электродвигателю 7 .потребуется увеличение момента, т.е. в данном случае ему необходима помощь, Р.езультирующий ток электродви гателя 12 складывается из постоянного тока, который задается регулятором 14 .гока (при постоянно включенном последовательно со схемой 15 управления добавочным резистором 25 и который, в основном, определяет натяжение магнитной ленты в приемной ветви тракта, и из добавочного тока, средняя величина которого определяется временными параметрами импульсного сигнала, управляющего транзисторным ключом 24, шунтирующим добавочный резистор 2. Результирующий ток электродвигат ля 2 бпределяется разностью между средним прямым током, протекающим по цепи: шина 3 - регулятор 4 тока электродвигате; ь 2 - транзисторный клю 23 (работающий в импульсном pe жим4). - шина 13, и средним обратным током, протекающим по цепи: шина 3 транзисторный ключ 22 (работающий в импульсном режиме) - электродвигатель 2 - ограничительный резисто 20 - транзисторный ключ 21 (работа ющий в импульсном режиме) - шина 1 В процессе набора скорости укор чивается длительность фазы разгона ведущего электродвигателя 7 и увеличивается длительность фазы его торможения, в результате уменьшает ся среднее значение добавочного тока электродвигателя 12 и, следовательно, его результирующий ток (участки Б, В диаграммы 7, фиг.2). С составляющими результирующего тока элек- тродвигателя 2 в это время происходит следующее: возрастает прямой ток и уменьшается обратный ток. При этом на участке Б диаграммы 6 (фиг.2) происходит уменьшение вращающегося момента обратного направления, а на участке В диаграммы 6 уже появился и возрастает рабочий вращающийся- момент, обеспечивающий подтормаживание подающей,,катушки с магнитной рентой. В установившемся режиме работы (режиме авторегулирования) релейного регулятора 9 скорости и в нормальных условиях результирующий ток электродвигателя 2 определяется, в основном, средним прямым током, а результирующий ток приемного электродвигателя 12 определяется, в основном, постоянным током регулятора 14 тока с учетом включенного добавочного резистора 25 в цепи управления этим регулятором (участок Г диаграммы 6, 7, фиг. 2). При возрастании по разным причинам сил сопротивления тракта протягиванию магнитной ленты 27 ведущим узлом 6 возрастает фаза разгона и. уменьшается фаза торможения ведущего электродвигателя 7 (диаграмму 2, фиг. 2). При этом в приемной ветви возрастает среднее значение добавочного тока электродвигателя 12, в ре-зультате чего возрастает и результирующий ток этого электродвигателя (участок Д диаграммы 7, фиг. 2), а в подающей ветви происходит уменьшение прямого тока и возрастание обратного тока электродвиагтеля 2, в результате .чего начинает уменьшаться его результирующий ток (участок Д диаграммы 6, фиг.2) и, следовательно, момент подтормаживания подающей катушки. Про.исходит компенсация возросшего сопротивления тракта лентопротяжного механизма электродвигателями, боковых узлов. Причем при значительном увеличении сопротивления тракта (которое вызывает g основном возрастание натяжения магнитной ленты в подающей ветви) происходит даже реверси рование вращения электродвигателя 2. , Стабилитрон 26 ограничивает по амплитуде импульсы самоиндукции обоих полярностей, возникающие на обмотке реверсируемого электродвигателя 2 во время импульсного управления электродвигателем. Таким образом, в предлагаемом лентопротяжном механизме в процессе стабилизации частоты оборотов вра.щения ведуп1его электродвигателя и. следовательно, скорости транспортир вания магнитной ленты при возрастании сопротивления тракта или наличи других паразитных факторов С.например, механических) автоматически подключаются и начинают работать синхронно с ведущим электродвигателем и электродвигателем подающего .и приемного узлов. Это значительно повышает надежность высокостабильно го транспортирования магнитной ленты предлагаемь№1 лентопротяжньам меха низмом в жестких механических и кли матических условиях эксплуатации, например, малогабаритной бортовой аппаратуры магнитной записи. Формула изобретения Лентопротяжный механизм,.содержащий подающий узел, электродвигатель которого первым выводом соедин с первой шиной питающего напряжения через первый регулятор тока, связанный с этой же шиной управляющим входом через первую схему управления, ведущий узел, электродвиг тель которого подключен через парафазный усилитель мощности к выходам релейного регулятора скорости, подсоединенного входом к датчику оборо тов, сопряженному.с валом электродвигателя ведущего узла, и приемный узел, электродвигатель которого пер вым выводом соединен с второй шиной питающего напряжения непосредственно, а вторым выводом - с первой шиной питающего папря)хения через втор регулятор тока, подсоединенный управляющим входом к первому выводу второй схемы управления, о т л и,ч ающи йс я тем, что-, с целью повышения наде : ности работы лентопротяжного механизма, в него дополнительно введены ограничительные и добавочный резисторы, первый, второй, шретий и четвертый транзисторные ключи и последовательно включенные ждущий мультивибратор, первый инвертор, схема совпадения и второй инвертор, при этом электродвигатель подающего узла первым выводом соединен дополнительно с второй шиной питающего напряжения через последовате льно включенные ограничительный резистор и первый транзисторный ключ, а вторым выводом - с первой шиной i через второй транзисторный ключ и с второй шиной питающего напряжения через третий транзисторный ключ, один из выходов релейного регулятора скорости соединен с входом ждущего мультивибратора,. вторым входом схемы совпадения и с управляющим входом четвертого транзисторного ключа, включенного параллельно добавочному резистору, через который второй вывод второй схемы управления соединен с первой шиной питающего напряжения, выход схемы совпадения со соединен дополнительно с управляющими входами первого и второго транзисторных ключей, а выход второго инвертора подключен к управляющему входу третьего транзисторного ключа. Источники информации, принятые во внимание при экспертизе 1.Патент США 3913966, кл. 242/191, 1975. 2.Патент Японии № 47-40806, кл. 102 Е 214.2, 1972.
HaSop cifopocmu
T-J
Рязгон
rn
irtlJtU Lf
Afrnopety ufofaMuf скорвсти
M UUlJl rL ri r|i
I Возроело eonpo- I
Горможенив mufflfHuf грвггв
n|riJV Lr4rnjnji
I, ,I -1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления синхронным гистерезисным электродвигателем | 1980 |
|
SU951619A1 |
| Устройство для управления резервным аппаратом магнитной записи | 1983 |
|
SU1062776A1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
| Устройство для перемещения магнитной ленты | 1989 |
|
SU1691885A1 |
| Тиристорный регулятор | 1990 |
|
SU1753555A1 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1529363A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 2015 |
|
RU2584005C1 |
| ШАГОВЫЙ ДВИГАТЕЛЬ С ДАТЧИКОМ ШАГОВ | 1994 |
|
RU2085020C1 |
| Вторичный источник питания постоянного напряжения | 1986 |
|
SU1325439A1 |
| Устройство для управления синхроннымэлЕКТРОдВигАТЕлЕМ лЕНТОпРОТяжНОгОМЕХАНизМА | 1979 |
|
SU842947A1 |