18
35
(Л
с
ГЧ)
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1410212A2 |
| Управляемый вентильный электродвигатель | 1986 |
|
SU1372516A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Вентильный электродвигатель | 1987 |
|
SU1504747A1 |
| Электропривод | 1987 |
|
SU1457135A1 |
| Вентильный электродвигатель | 1985 |
|
SU1259429A1 |
| Стабилизированный вентильный электродвигатель | 1981 |
|
SU1007160A1 |
Изобретение относится к электротехнике и может быть использовано в высокоточных электроприводах промышленных роботов. Целью изобретения является улучшение качества регулирования и повышение равномерности вращения путем исключения момента зубцовых пульсаций. Для исключения момента зубцовых пульсаций с помощью датчика 32 Холла корректора 33 формируется сигнал, повторяющий форму зубцового момента. Этот сигнал поступает на второй вход суммирующего усилителя 30 и суммируется с задающим сигналом. Суммарный сигнал через узел 29 выделения модуля поступает на вход релейного регулятора 26 тока. Регулятор тока пропорционально добавочному сигналу корректора 33 изменяет ток электродвигателя и соответственно его вращающий момент и тем самым осуществляет компенсацию возмущающего зубцового момента. Корректор 33 выполнен конструктивно таким образом, что позволяет сформировать сигнал на выходе датчика 32 Холла, полностью совпадающий с формой кривой момента зубцовых пульсаций, зависящих от конфигурации зубцов статора электрической машины 1. Регулировка корректора осуществляется путем углового перемещения обоймы 35 и изменения тока управления датчика Холла. 5 ил.
Фиг.1
Суммарный сигнал через узел 29 выде- ления 1 одуля поступает на вход релейного регулятора 26 тока. Регулятор тока пропорционально добавочному сиг- налу корректора 33 изменяет ток злект- родвигателя и соответственно его вра- |щающий момент и тем самым осуществляет компенсацию возмущающего зубцового моментав Корректор 33 выполнен кон- структивно таким образом что позволяИзобретение относится к электротехнике, в частности к вентильным электродвигателям, может быть использовано в высокоточных электроприводах промышленных роботов и является усовершенствованием изобретения по автссв. № 1259463,
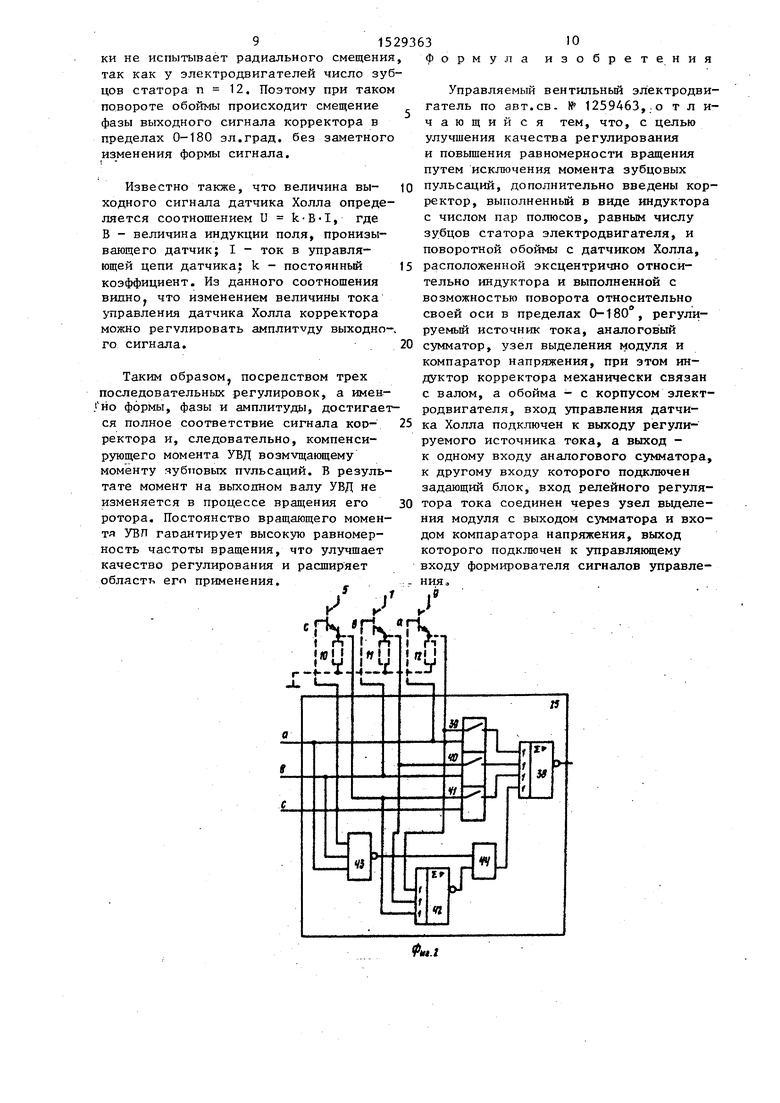
Цель изобретения - улучшение качества регулирования и расширение области применения за счет повьшения равномерности вращения путем исключения момента зубцовых пульсаций. На фиг. 1 представлена структурно- функциональная схема управляемого вентильного электродвигателя (УВД); ,а фиг. 2 - принципиальная схема дешифрирующего устройства на фиГоЗ - принципиальная электрическая схема релейного регулятора тока; на фиг,4- угловые диаграммы сигналов на элементах управляемого вентильного электродвигателя; н, фиго 5 - угловые диа- граммы сигналов датчика Холла корректора. УВД содержит (фиг. 1) трехфазную синхроннзпо электрическзпо машину 1, с валом которой соединен щестиканаль- ный датчик 2 положения ротора (ДПР), а якорная обмотка подключена к выходам транзисторного мостового коммутатора 3, выполненного на шести транзисторах 4-9, зашунтированных обратными диодами, в эмиттерные цепи нижних транзисторов которых включены резис- тивные датчики 10-12 тока.
Выходы шестиканального датчика 2 положения ротора подключены к входам формирователя 13 сигналов управления состоящегб из логического инвертора 14, трехканального реверсора из трех однотипных каналов 15-17, управляемых по входу 18, и шести логических элементов 2И 19-24, выходы которьж образуют шесть выходов формирователя
ет сформировать сигнал на выходе дat- чика Холла 32, полностью совпадающий с формой кривой момента зубцовых пульсаций, зависящих от конфигурации зубцов статора электрической машины 1, Регулировка корректора осуществляется путем углового перемещения обоймы 35 и изменения тока управления датчика Холла. 5 ил.
0
5
5
0
5
0
5
13 сигналов управления и подключены непосредственно шти через промежуточные усилители к управляющим цепям транзисторов 4-9.
Дешифрирующее устройство 25 включено между выходами резистивных датчиков 10-12 тока и первым входом релейного регулятора 26 тока, два выхода 27 и 28 которого подключены соответственно к двум управляющим цепям, образованньв- соединением между собой вторых входов логических элементов 2И 19, 21 и 23 и вторых входов логических элементов 2И 20, 22 и 24, первые входы которых подключены к выходам трех однотипных каналов 15-17 реверсора, одноименные управляющие входы которых объединены в две цепи, одна из которых соединена с другой через логический инвертор 14, и образуют вместе общий управляющий вход 18 трехканального-реверсора.
Второй вход релейного регулятора 26 тока соединен с выходом узла 29 выделения модуля, вход которого соединен с выходом .аналогового сумматора 30, к первому входу которого подключено задающее устройство 31, а к в торому входу - выход датчика Холла 32 корректора 33, состоящего из многополюсного индуктора 34 и обоймы 35,
Управляющие Bxo, датчика Холла 32, размещенного в обойме 35, подключены к регулируемому источнику 36 тока.
Управляющий вход 18 трехканально- го реверсора подключен к выходу аналогового сумматора 30 через индикатор 37 полярно сти, выполненный в виде компаратора напряжения.
Выходы резистивных датчиков 10-12 тока подключены к трем входам суммирующего усилителя 38 дешифрирующего
устройства 25 (фиг. 2) через быстродействующие ключи 39-41, а к входам усилителя 42 и логического элемента ЗИЛИ-НЕ 43 - непосредственно.
Четвертый вход суммирующего усилителя 38 подключен к выходу усилителя 42 через четвертый ключ 44, управляющий вход которого подключен к выходу логического элемента ЗИЛИ-НЕ.
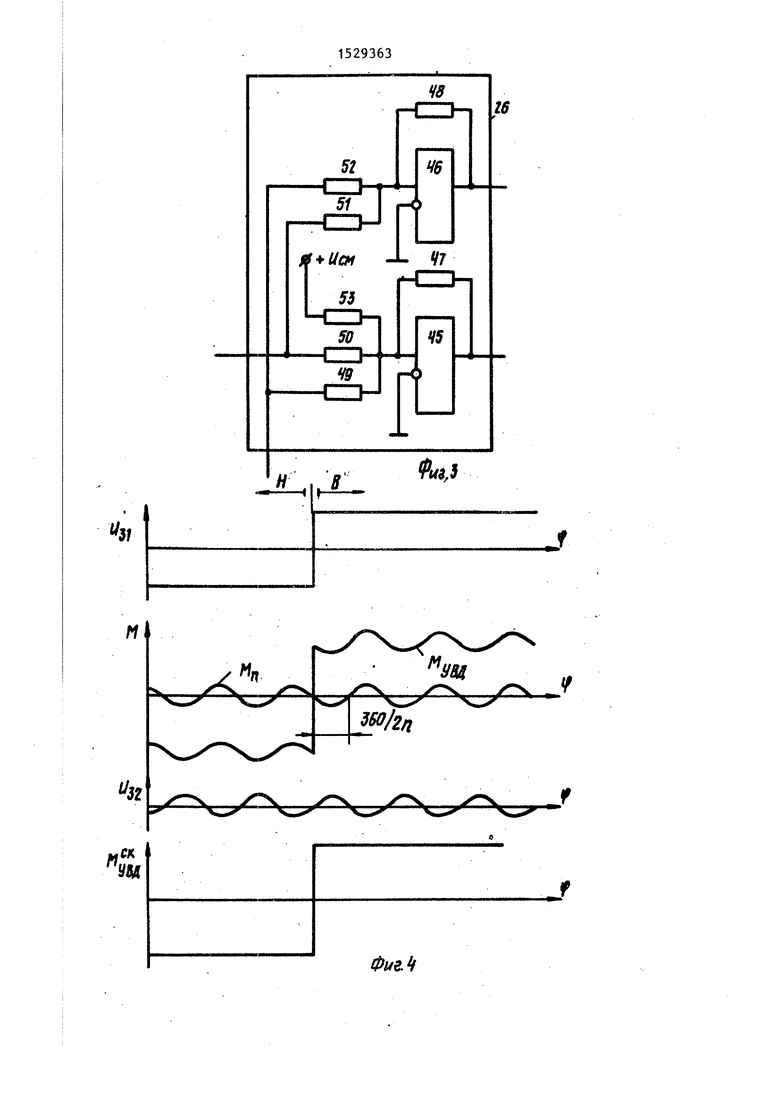
Регулятор 26 (фиг. 3) выполнен по схеме двойного токового коридора и состоит из двух однотипных операционных усилителей 45 и 46, охваченных обратной положительной связью через одинаковые по величине резисторы 47 и 48. На вход каждого из усилителей под ключены по два одинаковых по величине резистора 49-52, объединенных попарно и образующих первый и второй входы регулятора 26 тока. Выход усилителя 45 подключен к управляющей цепи 28, а выход усилителя 46 - к уп- равляющей цепи 27 формирователя 13 сигналов управления. Дополнительно на выход усилителя 47 через резистор 53 подается напряжение смещения.
УВД работает следующим образом.
Предположим, что исходное состояниезо -с модулем сигнала задания и при преУВД характеризуется установкой задающего напряжения U-j, положительной полярности (фиг, 4) и устойчивым угловым положением ротора, при котором ДПР 2 формирует единичные выходные
35
вышении первого над вторым формирует нулевые сигналы на выходах - управляющих цепях 27 и 28. Нулевой сигнал на управляющей шине 28 приводит к запиранию транзисторов верхней группы ком мутатора, а именно открытого ранее транзистора 4. Нулевые сигналы на обоих управляющих цепях 27 и 28 приво дит к запиранию всех транзисторов ком мутатора. Первому состоянию управля- ющей цепи соответствует режим динамического торможения электродвигателя а второму - режим противовключения. Посредством чередования указанных ре- д5 жимов (состояний управляющих цепей) релейный регулятор тока обеспечивает ограничение тока электродвигателя на уровне задающего сигнала. За счет взаимодействия тока в фазах обмотки электродвигателя с полем индуктора возникает вращающий момент Myg. , под действием которого ротор электродвигателя (индуктор) начинает вращаться. В процессе поворота вала электродвисигналы а , с , а корректор 33 выра1ба- тывает сигнал нулевого уровня. Допус
ти УБД подано питающее напряжение. Задающее напряжение подается на второй вход сумматора 30, ас его выхода поступает на входы узла 29 выделения модуля и индикатора 37 полярности напряжения. Согласно положительной полярности задающего сигнала индикатор полярности формирует на выходе сигнал нулевого уровня, который поступает на управляющий вход 18 трехка- нального реверсора. Одновременно задающий сигнал проходит через узел 29 выделения модуля без изменений величины и знака и поступает на вход релейного регулятора 26 тока. Под действием этого сигнала регулятор 26 тока формиру
ет единичные сигналы на обоих выходах,- гателя на угол Cf от принятого исход- которые поступают на управляющие цепи ного положения ротор начинает воспри- 27 и 28, объединяющие вторые входы ло- нимать возмущающий момент зубцовык гических элементов 2И 19-24 формирова- пульсаций М (фиг. 4), который для ителя 13 импульсов. В соответствии с уп- .приведенного случая снижает результи0
равляющими сигналами формирователь 13 импульсов передает единичные сигналы а , С ДПР без изменений на входы силовых транзисторов 9 и 4 транзисторного мостового коммутатора 3. Одновременно единичный сигнал а ДПР поступает На вход дешифрирующего устройства 25. Транзисторы 9 и 4 открываются, и под действием питающего напряжения ( -и) в фазах А, С электрической машины 1 начинает протекать ток. Ток в фазах электрической машины выделяется в виде напряжения на резистивном датчике 12 тока и поступает на один из аналоговых входов дешифрирующего устройства 25. Дешифрирующее устройство обеспечивает по сигналам q , Ь , С ДПР и датчиков 12, 11 и 10 тока выделение модуля тока электрической машины отрицательной полярности независимо от очередности протекания тока в фазах обмотки и режима работы электрической машины (двигательный или 5 генераторньпЧ). Модуль тока в рассматриваемом режиме работы электродвигателя подается на вход регулятора тока. Регулятор тока сравнивает по величине модуль тока электродвигателя
5
0
5
0
вышении первого над вторым формирует нулевые сигналы на выходах - управляющих цепях 27 и 28. Нулевой сигнал на управляющей шине 28 приводит к запиранию транзисторов верхней группы коммутатора, а именно открытого ранее транзистора 4. Нулевые сигналы на обоих управляющих цепях 27 и 28 приводит к запиранию всех транзисторов коммутатора. Первому состоянию управля- ющей цепи соответствует режим динамического торможения электродвигателя, а второму - режим противовключения. Посредством чередования указанных ре- 5 жимов (состояний управляющих цепей) релейный регулятор тока обеспечивает ограничение тока электродвигателя на уровне задающего сигнала. За счет взаимодействия тока в фазах обмотки электродвигателя с полем индуктора возникает вращающий момент Myg. , под действием которого ротор электродвигателя (индуктор) начинает вращаться. В процессе поворота вала электродвиэующий момент на валу Oд oвpeмeннo датчик Холла 32 корректора 33 форми- эует аналоговый сигйал, повторяющий |юрму зубцового момента. Этот сигнал поступает на второй вход суммирующего усилителя 30 и суммируется с задающим сигналом. Суммарный сигнал через узел 29 выделения модуля поступает на вход регулятора тока. Регулятор тока пропорционально добавочному сигналу корректора увеличивает ток электродвигателя и соответственно его вращающий момент, осуществляя компенсацию возмущающего зубцового момента В результате момента на выходном валу электродвигателя сохраняет свое постоянство в процессе поворота Через cf
360
йГ
поворота ротора (п - число пар
полюсов индуктора корректора, равное числу зубцов статора ЭМ1) направление воздействия возмущающего зубцового момента изменяется на противоположное, но при этом изменяется и полярность корректирующего сигнала, так как датчик Холла корректора перемещается в зону второго полюса противоположной полярности. Поэтому возникающее увеличение момента электродвига теля за счет зубцового момента компенсируется корректирующим сигналом отрицательной полярности посредством уменьшения тока электродвигателя : Да лее работа УВД с корректором происходит аналогично описанному Через угол С| поворота ротора УВД, не превышающий 60 эл,град,Jпроисходит переключение единичных сигналов G, Ь ДПР. Единичный сигнал на выходе а становится нулевьм, а нулевой на вьпсоде Ь единичным. Этим переключениям соответствует переключение силовых транзисторов 9 и 7о Первый закрывается, а второй открьшается. Происходит коммутация тока в фазах А, В якорной обмотки. Ток электродвигателя выделяется на датчике 11 тока,, Дешифрирующее устройство по единичному сигналу Ъ обеспечивает съем сигнала с датчика 11 тока, формирование его отрицательной полярности. При этом коррекция зубцовых моментов происходит аналогично описанному, и не зависит от очередности подключения фаз под нагрузку, В случае за,цания задающего сигнала отрицательной полярности ра бота УВД происходит аналогично описан , за исключением того, что инди
5
0
25
30
35
40
45
50
катор полярности устанавливается в единичное состояние по выходу, трех- канальный реверсор реверсирует три пары входных сигналов (0,0); (Ь,Ь); (с,с), в результате единичные входные сигналы а, с появляются на выходах а , с формирователя сигналов. Этими сигналами открьгоаются силовые транзисторы 8 и 5 коммутатора, ток электродвигателя фиксируется датчиком 10 тока, а дешифрирующее устройство по входному сигналу с осущест- вляет обработку сигнала с датчика 10 ,тока. На фиг. 4 вращение ротора УВД при отрицательном задающем сигнале обозначено условным символом Н.
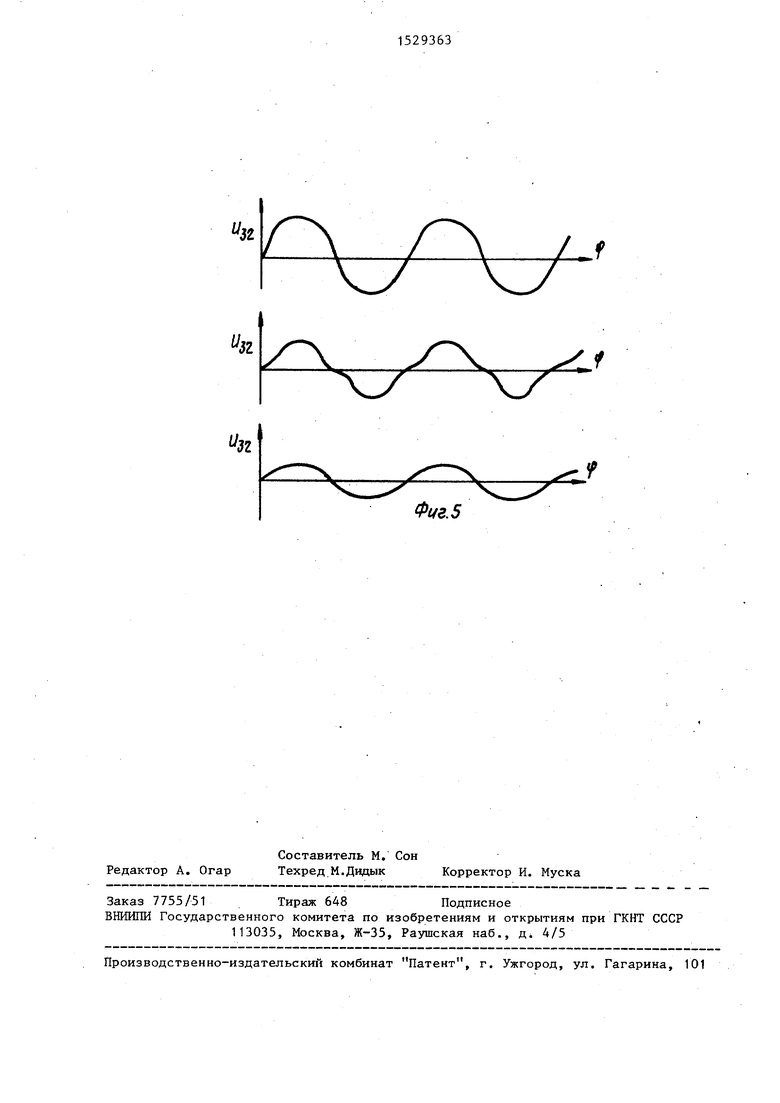
Корректор 33 имеет конструктивную особенность. Ось вращения обоймы 35 с датчиком Холла 32 на внутренней поверхности смещена относительно оси его индуктора, насаженного на вал электродвигателя 1. Такая конструктивная особенность корректора позволяет видоизменять форму выходного сигнала . при повороту обоймы с датчиком Холла в пределах 0-180° (фиг,5). Видоизменение формы сигнала происходит по следующей причине-. За счет смещения осей вращения обоймы и индуктора при повороте обоймы происходит радиальное перемещение датчика Холла относительно расточки индзпстора. При зтом происходит также незначительный поворот чувствительной поверхности датчика Холла относительно оси его . симметрии. Известно, что картина магнитного поля цилиндрического индуктора видоизменяется в зависимости от расстояния от поверхности полюса вследствие разряжения и искривления магнитных силовых линий.. Датчики Холла чувствительны только к нормальной составляющей индукции магнитного поля, поэтому при повороте обоймы в пределах 0-180° происходит существенное изменение формы и амплитуды его выходного сигнала Экспериментально проверено, что при равномерной намагниченности полюсов индуктора корректора- форма напряжения датчика Холла изменяется от трапецеидальной с перекодом в синусоидальную искаженную и неискаженную формы (фиг. 5).
При повороте обоймы в пределах I полюсного деления индуктора корректоfn 360 ° ра (.и - ) датчик Холла практичес91529363
ки не испытывает радиального смещения. Формула так как у электродвигателей число зубцов статора п 12. Поэтому при таком повороте обоймы происходит смещение фазы выходного сигнала корректора в пределах 0-180 эл.град, без заметного изменения формы сигнала.
10 изобретения
Управляемый вентильный электродви- гатель по авт.ев - № 1259463,.о т л ичающиися тем, что, с целью улучшения качества регулирования и повышения равномерности вращения путем исключения момента зубцовых пульсаций, дополнительно введены корректор, выполненньй в виде индуктора с числом пар полюсов, равным числу зубцов статора электродвигателя, и поворотной обоймы с датчиком Холла, 15 расположенной эксцентрично относительно индуктора и выполненной с возможностью поворота относительно своей оси в пределах 0-180, регулируемый источник тока, аналоговый 20 сумматор, узел выделения модуля и компаратор напряжения, при этом индуктор корректора механически связан последовательных регулировок, а имен- с валом, а обойма - с корпусом элект- ;но формы, фазы и амплитуды, достигает- родвигателя, вход управления датчи- ся полное соответствие сигнала кор- 25 ка Холла подключен к выходу регули- ректора и, следовательно, компенси- руемого источника тока, а выход - рующего момента УВД возмлпцающему к одному входу аналогового сумматора, моменту яубтювых пульсаций. В резуль- к другому входу которого подключен тате момент на выходном валу УВД не задающий блок, вход релейного регуля- изменяется в процессе вращения его 30 тора тока соединен через узел выделе- ротора. Постоянство вращающего момен- ния модуля с выходом с -мматора и вхоИзвестно также, что величина вы- ю ходного сигнала датчика Холла определяется соотнощением U k-B-I, где В - величина индукции поля, пронизывающего датчик; I - ток в управляющей цепи датчика: k - постоянный коэффициент. Из данного соотнощения видно у что изменением величины тока правления датчика Холла корректора можно регулировать aмплитvдy выходно-. го сигнала.
Таким образомJ посредством трех
тя УВП гатэантирует высокую равномерность частоты вращения, что улучшает качество регулирования и расширяет область егп применения.
дом компаратора напряжения, выход которого подключен к управляющему входу формирователя сигналов управления,
363
Формула
10 изобретения
Управляемый вентильный электродви- гатель по авт.ев - № 1259463,.о т л и
J
дом компаратора напряжения, выход которого подключен к управляющему входу формирователя сигналов управления,
а
W,
СК. I
т
Фие.
и
JZ
хл
vy
Фиг. 5
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
