(5) ЭЛЕКТРОРУБАНОК ДЛЯ СТРОГАНИЯ ДРЕВЕСИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ ЭЛЕКТРОРУБАНОК ДЛЯ СТРОГАНИЯ ДРЕВЕСИНЫ | 1971 |
|
SU309815A1 |
| РУЧНОЙ ЗЛЕКТРОРУБАНОК ДЛЯ СТРОГАНИЯ ДРЕВЕСИНЫ | 1972 |
|
SU426814A1 |
| РУЧНОЙ ЭЛЕКТРОРУБАНОК ДЛЯ СТРОГАНИЯ ДРЕВЕСИНЫ | 1971 |
|
SU309816A1 |
| РУЧНОЙ ЭЛЕКТРОРУБАНОК | 1971 |
|
SU315597A1 |
| Привод комбинированного станка | 1992 |
|
SU1831614A3 |
| РУЧНОЙ ЭЛЕКТРОРУБАНОК | 1973 |
|
SU382509A1 |
| Переносной универсальный деревообрабатывающий станок | 1988 |
|
SU1623859A1 |
| МЕХАНИЗИРОВАННЫЙ РУБАНОК | 1996 |
|
RU2136487C1 |
| КОМБИНИРОВАННЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1992 |
|
RU2044627C1 |
| Универсальный деревообрабатывающий станок | 1991 |
|
SU1818224A1 |
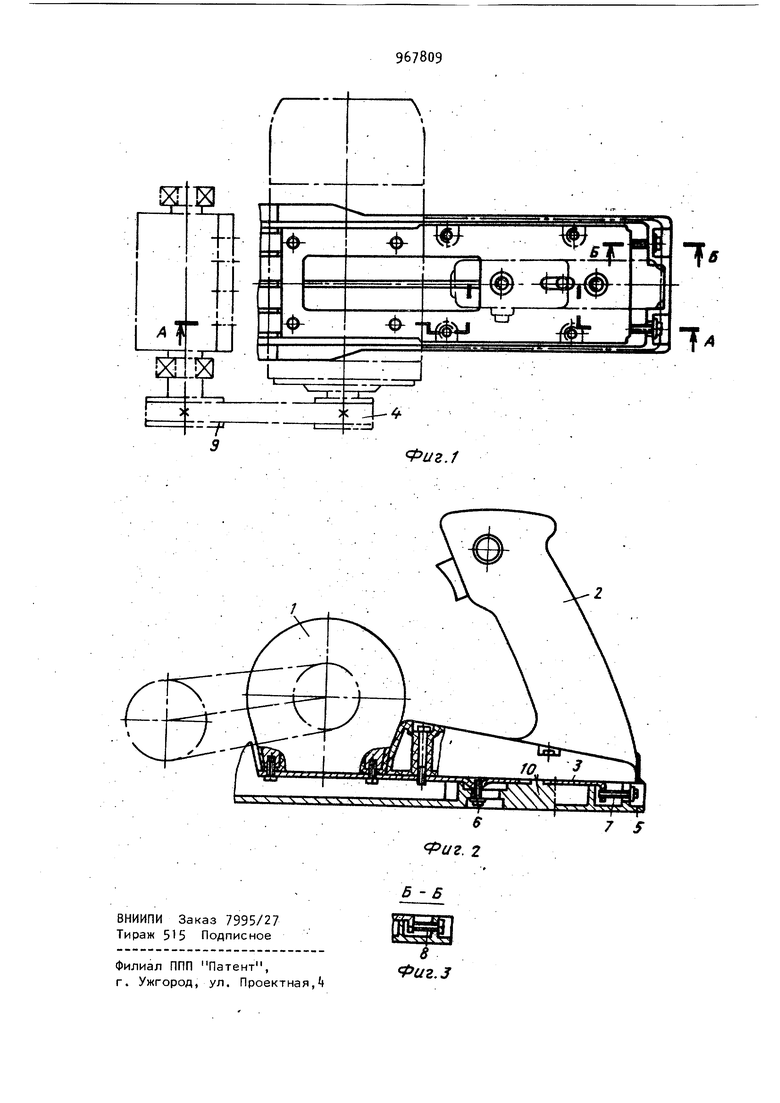
Изобретение относится к обработке древесины. Известен электрорубанок для строгания древесины, включающий корпус, ножевой вал с ведомым шкивом, электр двигатель с ведущим шкивом, регулировочные винты, рукоятку и ременный привод. Натяжение ремня в электрорубанке осуществляется оттяжкой непосредственно за рукоятку электродвигателя с ведущим шкивом, с последующим прикреплением электродвигателя к корпусу с помощью винтов, которые удерживают ремень в натянутом состоя нии С1 Э. Недостатком известной конструкции является то, что электродвигатель с ведущим шкивом не имеет плавной регулировки продольного хода для натяжения ремня. А это способствует неправильной установке предварительного натяжения ремня и быстрому его износу Кроме того, в известном устройст-: ве отсутствует регулировка взаимного положения шкивов ременного привода в поперечном направлении. Такая регулировка необходима, так как при изготовлении имеют место перекосы осей, осевое смещение шкивов, погрешность рабочих поверхностей шкивов, из-за которых при высоких оборотах (1020 тыс, об/мин) происходит частое сбегание ремня со шкивов, что сокращает долговечность ремня из-за продольных разрезов острой кромкой шкива или разлохмачивания при трении об неподвижные части электрорубанка и снижает надежность работы. Целью изобретения является повышение надежности в работе путем устранения сбегания ремня со шкивов. Эта цель достигается тем, что электрорубанок снабжен пластиной с пазом, причем электродвигатель с ведущим шкивом и рукояткой.смонтированы на этой пластине, которая установлена с боковыми зазорами в корпусе, который снабжен направляющим выступом, 396 расположенным в пазу пластины, а регулировочные винты связаны с одной из сторон пластины и расположены напротив стороны крепления пластины и электродвигателя. Один из регулировочных винтов выполнен упорным. На фиг. 1 изображен электрорубанок вид в плане; на фиг. 2 - разрез А-А на фиг. 1; на фиг. .3 разрез Б-Б на фи г. 1. Электрорубанок имеет узел, включаю щий в себя электродвигатель 1 и рукоятку 2, прикрепленные к пластине 3 Пластина 3 с прикрепленными к ней электродвигателем с ведущим шкивом i и рукояткой устанавливается с боковы ми .зазорами по отношению к бортам в корпусе 5 с помощью винтов 6. В корпу се 5 установлен тянущий винт 7, связанный резьбовой частью с резьбовым отверстием в пластине 3. Упорный винт .8 ввернут в резьбовое отверстие, выполненное в- корпусе 5 и упирается в пластину 3. Винт 6 и тянущийвинт 7 установлены в корпусе с зазорами, обеспечивающими возможность регулировки ременного привода ножевого вала с ведомым шкивом 9. Крепление узла к корпусу 5 осуществляется с помощью винтов 6 через резьбовые отверстия, выполненные в. пластине 3, а также через направляющий выступ 10. Регулирование ременного привода осуществляют в .следующей последовательности. Первоначально производят натяжение ременного привода. Для этого предварительно ослабляют крепление пластины 3 к корпусу 5 винтами 6, а упорный винт 8 выворачивают на расстояние от торца пластины, удобное для регулировки. Натяжение ременного привода осуществляют вворачиванием в пластину 3 тянущего винта 7, под действием которого электродвигатель с ведущим шкивом k перемещается в направлении от ведомого шкива 9 и разворачивается в пределах боковых зазоров между плас тиной 3 и корпусом 5 под действием момента от силы натяжения ременного привода. Затем с помощью упорного винта 8 производят регулирование положения ведущего шкива А по отношению к ведомому 9 в поперечном направле94нии. Для этого вворачивают винт 8, который, упираясь в пластину, создает момент, противоположный моменту от силы натяжения. При этом производят разворот электродвигателя в обратном направлении и совмещают визуально ве,дущий шкив с ведомым шкивом в поперечном направлении. Затем .вращением упорного винта 8 направо или налево добиваются такогр положения ведущего шкива по отношению к ведомому, при котором движущийся ремень устанавливается по середине рабочей поверхности шкивов. После окончания регулировки ременного привода пластина 3 закрепляется винтами 6 к корпусу 5. ; Таким образом, регулировка указанными средствами позволяет производить более точную регулировку осей шкивов относительно друг друга, что повышает надежность работы злектрорубан- ка. Формула изобретения 1.Электрорубанок для строгания древесины, включающий корпус, ножевой вал с ведомым шкивом, электродвигатель с ведущим шкивом, регулировочные винты,- рукоятку и ременный привод, о тли чающ и и с я тем, что, с целью повышения надежности в работе путем устранения сбегания ремня со шкивов, электрорубанок снабжен пластиной с пазом, причем электродвигатель с ведущим шкивом и рукояткой смонтированы на этой пластине, которая установлена с боковыми зазорами в корпусе, который снабжен направляющим выступом, расположенным в пазу пластины, а регулировочные винты связаны с одной из сторон пластины и расположенны напротив стороны крепления пластины и электродвигателя. 2.Электрорубанок по п. 1, о т личающийся тем, что один из регулировочных винтов выполнен упорным. Источники информации, принятые во внимание при экспертизе 1. Ручной рубанрк электрический. Паспорт ИЭ5701А-0000-ОООПС. 1978, с. 6.
