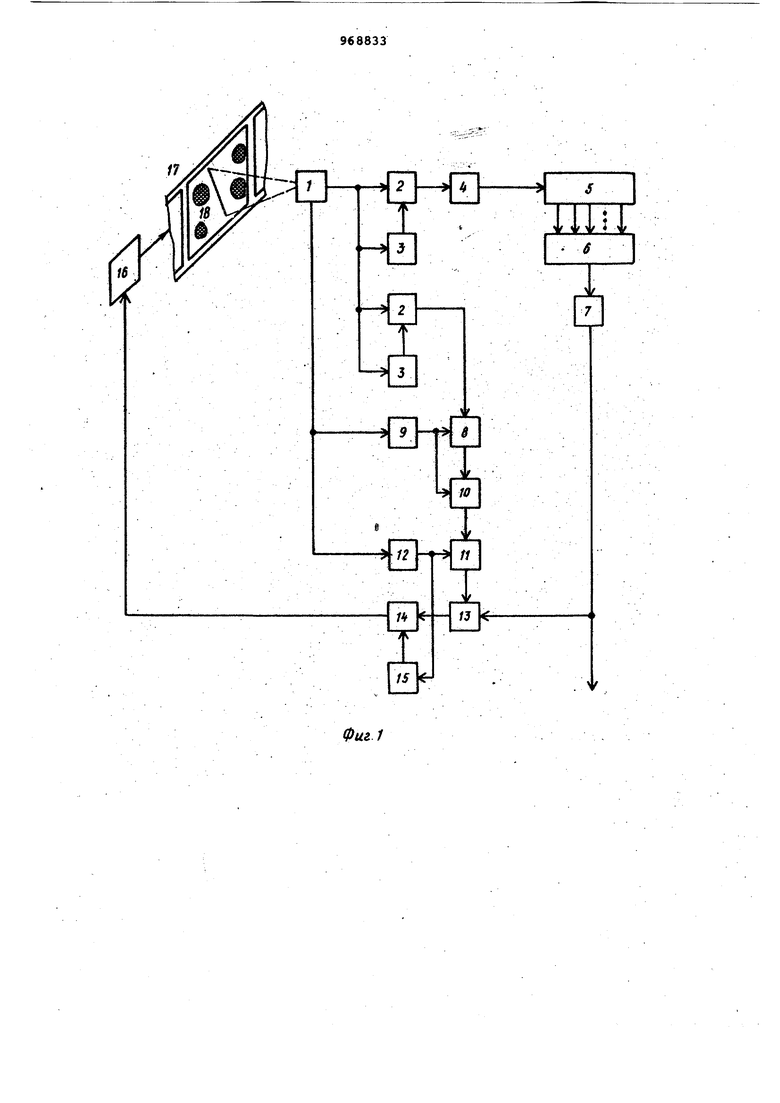
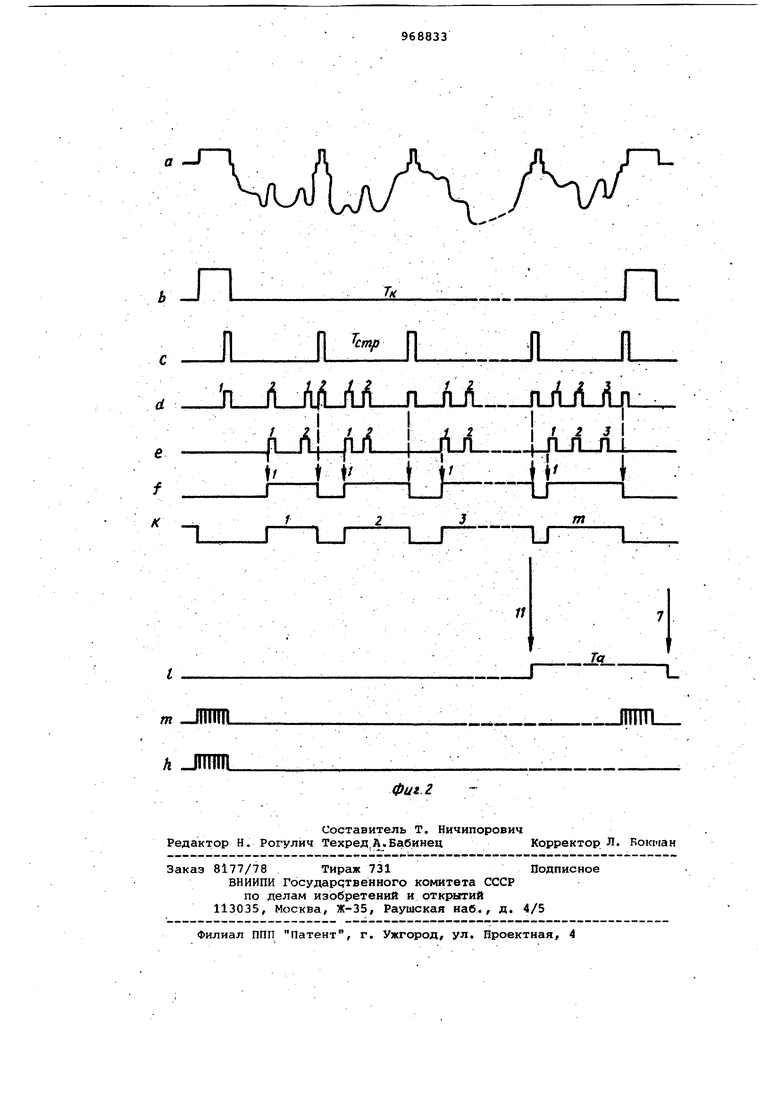
Изменение положения прямоугольной области - апертуры, осуществляется 3d счет ее углового перемецения в кадре в пределах угла 0-180 и линей ного, пере движения относительно анализируемого кадра. На операцию-поискасогласования положения прямоугольной -апертуры с положением линейного изображения, затрачивается много времени. Время предъявления кадра для поиска и обнаружения на нем линеЛ ного элемента определяется скоростью линейного передвижения прямоугольной апертуры и числом направлений линейной развертки, которое зависит от допустимого углового рассогласования между направлениями прямоугольной апертуры (направлением развертки) и линейным элементом изображения в момент их взаимодействия. Допустимое угловое рассогласование выбирается таким, чтобы обеспечить уверенное выделение линейного элемента, предъявляемого на сложном поле в присутст вии множества объектов другой информа ции 2. Его недостаток заключается в невысокой скорости поиска. Цель изобретения - повышение скорости поиска изображений объектов. Поставленная цель достигается тем что согласно способу, основанному на построчном сканировании изображений объектов, вычитании амплитуд сигналов яркости одноименных элементов изображений объектЬв смежных строк, ограничении по амплитуде полученных разностных сигналов, суммировании их амплитуд и сравнении результирующей амплитуды с амплитудой первого порогового сигнала, и формировании второго порогового сигнала,дополнительно суммируют первые по порядку амплитуды ограниченных разностных сигнёшов соседних элементов каждой строки в одном направлении, сравнивают суммарную амплитуду с амплитудой второго порогового сигнала и по результату сравнения судят о необходимости дальнейшего сканирования изобра жений линейных объектов в других направлениях.. На фиг. 1 представлена блокг схема устройства, реализующего предлагаем способ; на фиг. 2 - временные диаграм мы его работы. Устройство включает телевизионный датчик 1, блоки 2 вычитания, элементы 3 задержки видеосигнала на время длительности одной строки и элемента разложения соответственно, амплитудный ограничитель 4, элемент 5 задержки видеосигнала на время длительности ORHoif строки с отводами через время длительности сканирования одного элемента разложения изображения, сумматор б, пороговый элемент 7, первый ключ 8, датчик 9 строчных синхроимпульсов с периодом ТСТР / триггер 10, счетчик .11, датчик 12 кадровых синхроимпульсов с периодом Т| , ждущий мультивибратор 13, второй ключ 14, генера:тор IS тактовых импульсов, блок 16 протяжки пленки, носитель информации, например пленка 17, кадр 18 с изображением на п.ленке. Устройство работает следующим образом. Датчик 1 видеосигнала формирует j электрический сигнал при строчной И кадровой развертках изображения. Видеосигнал с кадровыми и строчными синхроимпульсами показан на диаграм- . ме а . Видеосигнал с датчика непосредственно и через элемент задерж- , KH 3 поступает на блок 2 выч:итания, где происходит вычитание амплитуды сигналов яркости одноименных элементов изображения соседних строк. Разностные сигналы, свидетельствующие о наличии перепадов яркости между элементами изображения соседних строк, ограничиваются по амплитуде на одном уровне амплитудным ограничителем 4. Этим устраняется влияние абсолютной яркости изображения на принятие решения. Нормированные по амплитуде сигналы на выходе ограничителя :4 показаны на соответствующей диаграмме d. Здесь прямоугольниками условно показаны строчные синхроимпульсы, а цифрами обозначены разностные сигналы. С выхода ограничителя 4 нормированные по амплитуде сигналы поступают на элемент задержки с отводами 5, На выходах которого одновременно появляются все разностные сигналы, сформированные за время сканирования одной строки. Эти разностные сигналы суммируются в сумматоре 6. При превышении амплитудой суммарного сигналазаранее выставленного порогового уровня в пороговом элементе 7 на выходе его формируется сигнал распознавания линейного Объекта на пленке. -Эта.часть схемы работает в соответствии с ограничительной частью формулы изобретения, реализуя известный способ распознавания Линейных элементов изображения. Для поиска линейного объекта необходимо последовательно менять направление построчного сканирования анализируемого кадра в пределах угла 0-180, чтобы обеспечить совпадение направления прямолинейной границы изображения линейного объекта с направлением строки. По окончании полного цикла анализа одного кадра 18 блок 16 протяжки протягивает пленку 17 на один кадр, при зтом для анализа предъявляется следующий за проанализированным кадр. Одновременно с поступлением , на блоки 2 и 3 видеосигнала с телевизионного датчика 1 непосредстве.нно и через соответствующий элемент 3 задержки поступает в соответствующий блок 2, где происходит вычитание амплитуд сигналов яркости соседних элементов разложения каждой строки. Разностные сигналы, свидетельствующие о наличии перепадов яркости между соседними элементами разложения в строке, поступают на вход первого ключа 8, управляемого от датчика 9 строчных синхроимпульсов (диаграмма с ). С помощью датчика 9 и ключа 8 из видеосигнала вырезаются строчные синхроимпульсы (диаграмма е ). С выхода ключа В первый по порядку разностный сигнал приводит к срабатыванию триггера 10, который
формирует на прямоугольный перепад сигнала, прерываемый в конце строки, так как строчный синхроимпульс с датчика 9 возвращает триггер 10 в исходное состояние. Процесс фор(«мрования только по одному импульсу от первых по порядку разностных сигнёшов на каждой строке показан на диаграмме f. Импульсы с триггера 10 Поступают на вход счетчика 11, который подготавливается к работе в начале каждого (сбрасыбание содержимого счетчика ) кадровыми синг хроимпульсами, поступающими от датчика кадровых синхроимпульсов 12 (диаграмма -€). Счетчик 11 просчитывает импульсы, поступающие от триггера 10 за время сканирования одного кадра в одном направлении (диаграмма V) Зта операция эквивалента суммированию числа первых по порядку ограниченных сигналов каждой строки за время сканирования изображения.в одном направлении. При поступлении на счетчик 11 заранее определенного числа импульсов с его выхода снш ается сигнал , включающий ждущий мультивибратор 13, который формирует импульс, дл)нтельность которого соответствует времени анализа (Т) одного кадра по всем направлениям строчной развертки в пределах угла 0-180 . Этот импульс может быть прерван сигналом, поступающим с выхода порогового элемента 7, т.е. после обнаружения на кадре линейного объекта.
Работа ждущего мультивибратора иллюстрируется диаграммой . Сигнал с выхода ждущего мультивибратора закрывает второй ключ 14 на время анаиза кадра TQ, прекращая на это врея протяжку пленки 17, так как на лок 16 протяжки за это время (Т,) е поступают управляющие импульсы т тактового генератора, синхронизИуёмого кадровыми синхроимпульсами Т датчика 12. Работа этой части
иллюстрируется диаграммами m и п. Таким образом, при обнаружении на кадре за время его сканирования в одном направлении сложной структуры или линии произвольного направления (когда еще не определена ее ориентация). Формируется сигнал, превышающий заранее выставленное его значение. Он запирает схему протяжки пленки. Кадр со сложной структурой остается в поле зрения автомата на. время его полного анализа по всем направлениям или до обнаружения линейного объекта с фиксацией его расположения и направления. При попадании в поле зреНИН автомата кадра с гладким фоном или слабо пораженными помехами фоном суммарный сигнал на счетчике 11 не достигнет заранее установленного значения, схема протяжки пленки не блокиФована, тактовь1й генератор 15 управт ляет блоком 16 протяжки пленки и происходит смена кадров после сканирования иХ только в одном направлении обеспечивается ускоренная протяжка
пленки.
1 /
Введение дополнительных операций позволяет повысить скорость поиска изображений линейных объектов.
30
Формула изобретения
Способ поиска изображений линейных объектов, основанный на построчном сканировании изображений объекто вычитании амплитуд сигналов яркости одноименных элементов изображений объектов смежных строк, ограничении по амплитуде полученных разностных
сигналов, сумктровании их амплитуд .и сравнении результирующей амплитуды с амплитудой первого порогового сигнала, и формировании второго порогового сигнала, отличающийс я тем, что, с целью повышения
скорости поиска изображений линейных объектов, суммируют первые по порядку амплитуды ограниченных разностных сигналов смежных элементов каждой
строки в одном направлении/ сравнивают суммарную амплитуду с амплитудой второго порогового сигнала и по результату сравнения судят о необходимости дальнейшего сканирования
изображений линейных объектов в других направлениях.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР №630524, кл. G Об К 9/13, 1978.
2.Авторское свидетельство СССР 597274,-кл. G Об К 9/13, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| Устройство для записи телевизионного сигнала цветного изображения | 1972 |
|
SU1242004A3 |
| Телевизионное устройство селекции изображений объектов | 1988 |
|
SU1665545A1 |
| Устройство для автоматической фокусировки объектива | 1990 |
|
SU1744692A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Устройство для контроля полупроводниковых структур по фотоответу | 1982 |
|
SU1027653A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| Устройство для демонстрации синусоидальных тестов | 1982 |
|
SU1109123A1 |
| Устройство для ввода информации | 1985 |
|
SU1293725A1 |
п
1
(1ЦМ1 п rt п JiJ 11
П
п п ibL. .т
nj ni d Дп II 4f-
