Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического распознавания и классификации объектов разведки в технических средствах разведки и прицеливания роботизированных комплексов вооружения.
Известен способ селекции признаков при распознавании изображений объектов, основанный на покадровом и построчном сканировании изображений объектов, формировании разностных сигналов между текущими и задержанными видеосигналами соседних строк, суммировании их длительностей и последующем определении различных моментов (патент Японии N 54-2807, кл. 97/7 (В622), опублик. 1979).
Этот способ имеет невысокую точность.
Наиболее близким к изобретению является способ, основанный на покадровом и построчном сканировании изображений объектов (авт.св. N 1078448, кл. G 06K 9/36, 1984), амплитудной селекции и двухградационном квантовании видеосигнала.
В данном способе для селекции признаков распознавания формируют разностные сигналы между текущими и задержанными видеосигналами соседних строк и суммируют их длительности, построчно суммируют длительности видеосигналов текущих строк сканирования в двух взаимно ортогональных направлениях, интегрируют их за период времени кадровой развертки изображений объектов и используют величины результирующих сигналов в качестве признаков распознаваемых изображений. При этом длительности разностных видеосигналов пропорциональны размерам изображения в пределах текущих строк сканирования.
Недостаток известного способа заключается в невысокой помехоустойчивости селектируемых признаков распознавания изображения и в невозможности идентификации определенных элементов их контуров.
Цель изобретения повышение помехоустойчивости селектируемых признаков распознавания и расширение условий применения.
Указанная цель достигается тем, что полные кадры сканирования осуществляют К раз, причем поворачивают изображение объекта перед началом каждого q-го кадра на угол 2π/K вокруг геометрического центра кадра, генерируют К синхроимпульсов начала кадра единичной амплитуды с частотой, обратной суммарному времени полного кадра и поворота изображения, суммируют q синхроимпульсов начала кадра, задерживают суммарный сигнал до появления очередного синхроимпульса начала кадра, в каждом кадре генерируют N синхроимпульсов единичной амплитуды начала строки с частотой кадрового сканирования, сравнивают по амплитуде видеосигнал с пороговым уровнем и квантуют по амплитуде на единичный и нулевой уровни, в каждой строке суммируют текущий синхроимпульс начала строки с предыдущими синхроимпульсами начала строки текущего кадра и генерируют N синхроимпульсов с амплитудой, пропорциональной синусу угла 2π•q/K, N синхроимпульсов с амплитудой, пропорциональной косинусу угла 2π•q/K, и N синхроимпульсов с амплитудой, равной N/2, вычитают из синхроимпульса с амплитудой, равной N/2, суммарный сигнал синхроимпульсов начала строки, разделяют разностный сигнал на два равных, первый из которых перемножают с синхроимпульсом с амплитудой, пропорциональной синусу угла 2π•q/K а второй перемножают с синхроимпульсом с амплитудой, пропорциональной косинусу угла 2π•q/K задерживают полученные результирующие сигналы покадрового сканирования и одновременно генерируют N тактовых импульсов единичной амплитуды и суммируют каждый тактовый импульс с предыдущими с момента появления синхроимпульса начала строки до момента появления видеосигнала единичного уровня, вычитают из суммарного сигнала одновременный синхроимпульс с амплитудой, равной N/2, разделяют разностный сигнал на два равных, первый из которых перемножают с одновременным синхроимпульсом, амплитуда которого пропорциональна синусу угла 2π•q/K а второй перемножают с синхроимпульсом, амплитуда которого пропорциональна косинусу угла 2π•q/K одновременно с полученными результирующими сигналами построчного сканирования генерируют пороговый сигнал с амплитудой тактовых импульсов и суммируют тактовые импульсы от момента появления до момента окончания видеосигнала единичного уровня в текущей строке, сравнивают суммарный сигнал с пороговым, задерживают в случае, если сравниваемый сигнал не превышает порогового, результирующие сигналы построчного сканирования момента очередного синхроимпульса начала строки, одновременно генерируют и задерживают синхроимпульсы выполнения порога до момента очередного синхроимпульса начала строки, в момент появления очередного синхроимпульса начала строки суммируют текущий синхроимпульс выполнения порога с предыдущими, задерживают суммарный сигнал до момента появления очередного синхроимпульса начала строки, одновременно суммируют второй сигнал из пары одновременных результирующих сигналов покадрового сканирования и первый сигнал из пары одновременных результирующих сигналов построчного сканирования, одновременно вычитают из второго сигнала из пары одновременных результирующих сигналов построчного сканирования первый сигнал из пары одновременных результирующих сигналов покадрового сканирования, задерживают полученные суммарный и разностный сигналы на время, кратное двум периодам полного кадра, причем в обоих случаях первый задерживаемый сигнал задерживают n, где n амплитуда суммарного сигнала синхроимпульсов выполнения порога, второй и последующие n-k, где  , раз с дискретом задержки, равным периоду покадрового сканирования, вычитают из каждого появляемого после задержки сигнала очередной в порядке появления сигнал, разделяют каждый из полученных разностных сигналов на два равных сигнала, перемножают парные равные сигналы, суммируют одновременно следующие перемноженные сигналы, задерживают n-k раз первый и каждый [(2n-k-1)k/2+1]-й в порядке следования суммарный сигнал на время задержки, равное периоду покадрового сканирования, делят каждый из задержанных сигналов после окончания задержки на следующие за ним без задержки сигналы, задерживают первично каждый результирующий сигнал на время задержки, кратное двум периодам полного кадра, вторично задерживают первые, третьи и т.д. (n-1)-ые n-k-1 следующих после первичной задержки результирующих сигналов на время, равное (n-k-1)-му периоду следования сигналов, окончательно задерживают каждый появляемый после вторичной задержки сигнал и следующий одновременно с ним сигнал после первичной задержки на время, кратное периоду полного кадра, каждая пара появляемых одновременно после окончательной задержки результирующих сигналов представляет собой признак распознаваемого объекта.
, раз с дискретом задержки, равным периоду покадрового сканирования, вычитают из каждого появляемого после задержки сигнала очередной в порядке появления сигнал, разделяют каждый из полученных разностных сигналов на два равных сигнала, перемножают парные равные сигналы, суммируют одновременно следующие перемноженные сигналы, задерживают n-k раз первый и каждый [(2n-k-1)k/2+1]-й в порядке следования суммарный сигнал на время задержки, равное периоду покадрового сканирования, делят каждый из задержанных сигналов после окончания задержки на следующие за ним без задержки сигналы, задерживают первично каждый результирующий сигнал на время задержки, кратное двум периодам полного кадра, вторично задерживают первые, третьи и т.д. (n-1)-ые n-k-1 следующих после первичной задержки результирующих сигналов на время, равное (n-k-1)-му периоду следования сигналов, окончательно задерживают каждый появляемый после вторичной задержки сигнал и следующий одновременно с ним сигнал после первичной задержки на время, кратное периоду полного кадра, каждая пара появляемых одновременно после окончательной задержки результирующих сигналов представляет собой признак распознаваемого объекта.
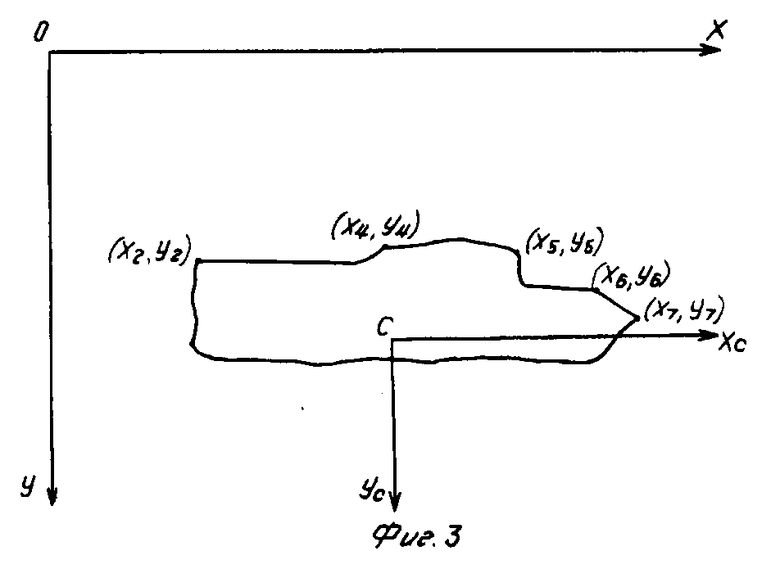
На фиг. 1 представлена блок-схема устройства, реализующего способ, на фиг. 2, 3 примеры изображений распознаваемого объекта.
Приняты следующие обозначения:
XOY система координат, связанная с кадром;
Yi, Xi сигналы, амплитуды которых пропорциональны соответственно номеру J текущей строки сканирования и текущей координате I видеосигнала от объекта в J-ой строке, т.е. Yi=A•J; Xi=A•I, где i=I; A коэффициент пропорциональности, A 1;
Zi число тактовых импульсов в течение видеосигнала единичного уровня (от объекта);
Zпор пороговый сигнал, амплитуда которого Zпор равна 2 (в десятичном коде);
SINq, COSq содержание первого и второго преобразователей код амплитуда при подаче на их управляющие входы сигнала-кода q c амплитудой q, равной числу кадров от первого до данного q-го кадра,  т.е.
т.е.
SINq= sinωq;COSq=cosωq;ωq= 2q•π/K;
K1 эталонное число элементов максимальной кривизны контуров изображений эталонных объектов, K1=K/4;
N количество строк сканирования в одном кадре;
XO синхроимпульс, генерируемый с амплитудой, пропорциональной половине количества строк кадра, т.е. N/2;
YVi, XVi разностные сигналы, получаемые в результате вычитания: YVi= XO-Yi; XVi=Xi-XO;
YSi, XSi результирующие сигналы SINq - преобразования сигналов YVi, XVi;
YCi, XCi результирующие сигналы COSq - преобразования сигналов YVi, XVi;
YPi суммарный сигнал, получаемый в результате суммирования сигналов YCi и XSi;
XPi суммарный сигнал, получаемый в результате вычитания из сигналов XCi и YSi;
n амплитуда результирующего сигнала счетчика задерживаемых сигналов YPi(XPi);
RYij, RXij разностные сигналы, получаемые в результате вычитания соответственно сигналов YPi, YPj и XPi, XPj, т.е. RYij=YPi-YPj; RXij=XPi-XPj, где i<j; 
CYij, CXij квадратичные разностные сигналы, т.е. CYij=RYij • RYij; CXij= RXij • RXij;
Sij суммарные сигналы, т.е. Sij=CXij + CYij;
Dl результирующие сигналы от деления первого и каждого [(2n-k-1)k/2+1, где  ]-го сигнала на последующие n-k-1 сигналов; n-k-1=k1;
]-го сигнала на последующие n-k-1 сигналов; n-k-1=k1; 
Рlm результирующие парные сигналы, по величинам которых судят о признаках распознаваемых объектов, т.е. Plm (Dl,Dm), где m=l+n-k-1; a≅l≅a+k1-1.
Операции в предлагаемом способе осуществляют следующим образом.
Кадровое и строчное сканирование осуществляют аналогично известному способу. Генерирование и суммирование синхроимпульсов начала кадра осуществляют с помощью генератора и счетчика цифровых сигналов.
Формирование видеосигналов и сигналов Yi, Xi, Zi, генерирование и суммирование синхроимпульсов начала строки и тактовых импульсов осуществляют аналогично способу, реализованному в устройстве по авт.св. N 1238117, кл. G 06K 9/00, 1986).
Поворот сканируемого изображения объекта перед началом каждого из кадров вокруг геометрического центра кадра на угол 2π/K относительно предыдущего кадра осуществляют с помощью оптической системы, фокусирующей изображение объекта в плоскости кадра и содержащей элемент поворота изображения вокруг оптической оси, проходящей через геометрический центр кадра. При этом механический шаговый поворот элемента на заданный дискретный угол обеспечивает поворот изображения объекта на угол 2π/K причем шаговый поворот осуществляют перед началом каждого из кадра. Вычитание сигналов XO и сигналов Yi, Xi осуществляют с помощью простых цифровых вычитающих устройств.
Формирование сигналов YSi(XSi) и YCi(XCi) осуществляют с помощью соответствующего цифрового преобразователя код - амплитуда (код напряжение), на управляющий вход которого подают сигнал-код, амплитуда которого пропорциональна числу поворотов сканируемого изображения объекта от первого до данного (q-го) кадра. При этом коэффициент усиления в одном из преобразователей равен SINq, в другом COSq.
Суммирование сигналов YCi и XSi и вычитание из сигнала XCi сигнала YSi осуществляют с помощью простых цифрового сумматора и цифрового вычитающего устройства, с выхода которых поступают соответственно сигналы YPi и XPi.
Задержку результирующих суммарного YPi и разностного XPi сигналов осуществляют с помощью регистров соответствующего (для YPi или XPi) блока памяти, расположенных в порядке, соответствующем порядку поступления сигналов. При этом в каждом регистре (в режиме "запись") задерживают один сигнал (здесь и в дальнейшем под такими регистрами подразумевают сдвиговые регистры с параллельной записью сигналов). Разрядность регистров должна соответствовать количеству строк в кадре, т.е. определяется величиной N.
Генерирование и суммирование синхроимпульсов порога для n задерживаемых сигналов YPi(XPi) осуществляют с помощью компаратора, в котором сравнивают текущий сигнал Zi с генерируемым постоянным сигналом Zпор, и в случае, если разностный сигнал Zпор-Zi имеет нулевую или единичную амплитуду, подают пороговый сигнал Zпор на вход счетчика сигналов.
Формирование разностных сигналов RYij и RXij осуществляют путем многократного, (n-k+1)-кратного  , считывания сигналов из каждого от 1-го до (n-1)-го регистров блока памяти и поочередного попарного вычитания из них сигналов, однократно считываемых из каждого из следующего за ними в порядке близости (соответствует порядку задержки ("запоминания")) регистра так, что в результате на выходе двух блоков памяти получают две параллельно поступающие последовательности сигналов
, считывания сигналов из каждого от 1-го до (n-1)-го регистров блока памяти и поочередного попарного вычитания из них сигналов, однократно считываемых из каждого из следующего за ними в порядке близости (соответствует порядку задержки ("запоминания")) регистра так, что в результате на выходе двух блоков памяти получают две параллельно поступающие последовательности сигналов
общим числом n(n-1)/2 сигналов.
Формирование квадратичных сигналов CYij и CXij осуществляют с помощью умножителей разделением каждого из сигналов RYij и RXij на два равных сигнала и перемножением полученных разделением сигналов.
Формирование суммарных сигналов Sij осуществляют с помощью сумматора путем суммирования одновременно поступающих на его входы сигналов CYij и CXij.
Задержку суммарных сигналов осуществляют путем последовательного их помещения в регистры блоков памяти так, что каждые два одновременно поступающих сигнала задерживают в одинаково расположенных в двух идентичных блоках памяти регистрах.
Деление задержанных сигналов CYij и CXij осуществляют путем (n-k)-кратного считывания сигналов из каждого [(2n-k-1)k/2+1,  ]-го в порядке близости регистра и поочередного попарного деления их на однократно считываемые из n-k-1 в порядке близости следующих за ним регистров.
]-го в порядке близости регистра и поочередного попарного деления их на однократно считываемые из n-k-1 в порядке близости следующих за ним регистров.
Задержку результирующих сигналов Dl осуществляют путем последовательного в порядке поступления сигналов размещения сигналов в соседние регистры блока памяти.
По парным величинам каждого l-го и (l+n-k-1)-го запомненных сигналов судят о значениях признаков распознаваемого по изображению объекта.
Последовательно считывают такие пары сигналов из регистров блока памяти, причем первый парный сигнал задерживают до поступления второго парного сигнала так, что окончательно парные сигналы следуют одновременно.
Таким образом, результирующие, поступающие одновременно парные сигналы Plm=(Dl, Dm) содержат в себе признаки распознавания объекта по его изображению.
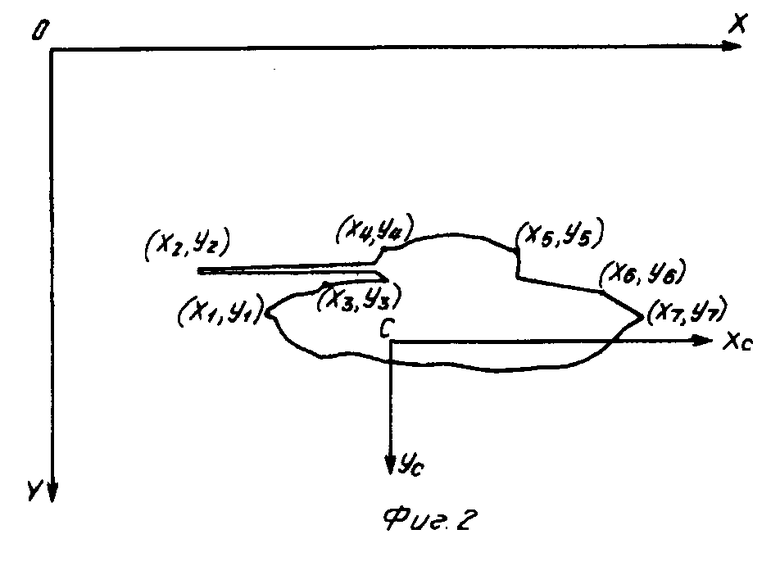
Математический вид признаков распознавания может быть пояснен с помощью фиг. 2 а,б (XOY(XCY) система координат с началом отсчета в начале O (центре C) кадра; стрелкой показано направление вращения изображения).
Для примера эталонного изображения, приведенного на фиг.2а, совокупность признаков имеет вид
где (Xi(j), Yi(j)) координаты выпуклых элементов минимального радиуса кривизны контура изображения (при этом Zi(j) ≅ Zпор).
Очевидно, что признаки распознавания такого вида инвариантны к масштабу и ориентации изображения.
Из примера "частично видимого" изображения, показанного на фиг.2б, видно, что при частичном искажении контура объекта часть эталонной совокупности признаков распознавания будет идентична признакам, определяемым по неискаженной части, (x2, y2) (x4,y4) (x5,y5) (x6,y6) (x7,y7), изображения. В то же время признаки распознавания, селектируемые по известному способу на значительно зашумленном и незашумленном изображении, не могут быть идентичными, так как зависят только от одновременных величин периметра и координат центра тяжести изображения (авт.св. N 1078448, кл. G 06К 9/36, 1984) и, следовательно, от масштаба изображения.
Таким образом, способ позволяет не только повысить помехоустойчивость селектируемых признаков за счет анализа изображения не по всему контуру, а только по его опорным элементам, но и расширить условия применения на "частично видимые" и разномасштабные изображения.
Способ может быть реализован с помощью устройства, блок-схема которого представлена на фиг. 1.
Блок-схема устройства включает фокусирующий элемент 1, выполненный в виде объектива с вращающейся прямой Дове, устройство 2 для кодирования видеосигналов, блок 3 управления, первый счетчик 4, первый 5 и второй 6 преобразователи код амплитуда, компаратор 7, первый сумматор 8, сумматор-вычитатель 9, второй счетчик 10, первый блок 11 задания адреса, первый 12 и второй 13 блоки памяти, первый 14 и второй 15 демультиплексоры, первый 16 и второй 17 блоки вычитания, первый 18 и второй 19 умножители, третий сумматор 20, третий блок 21 памяти, второй блок 22 задания адреса, третий демультиплексор 23, делитель 24, четвертый блок 25 памяти, третий блок 26 задания адреса, четвертый демультиплексор 27.
Способ с помощью устройства осуществляют следующим образом. На вход объектива фокусирующего элемента 1 поступает оптическое изображение от объекта.
Создаваемое объективом изображение проецируется через призму Дове, входящую в состав фокусирующего элемента, на фоточувствительный экран датчика видеосигналов, входящего в состав устройства 2 для кодирования видеосигналов, аналогичного устройству, описанному в авт.св. N 1238117, кл. G 06K 9/00, 1986).
С помощью призмы Дове осуществляют вращение изображения объекта в плоскости фоточувствительного экрана датчика видеосигналов.
С началом первого кадра с выходов генератора тактовых импульсов, входящего в состав блока 3 управления, на управляющие входы блоков 13, 14, 21, 25 памяти и блоков 11, 22, 26 задания адреса, первого 4 и второго 10 счетчиков поступает сигнал "сброс", устанавливающий нулевое состояние в регистрах блоков, а также режим "запись" в блоках памяти. Одновременно этот сигнал подают на вход первого счетчика 4.
Последующие K-1 тактовых импульсов генератора запускают двигатель, входящий в состав блока 3 управления и используемый для поворота призмы Дове (авт.св. N 1112381, кл. G 06К 9/36, опубл. 1984). При этом период следования тактовых импульсов равен времени Tk одного кадра сканирования изображения объекта устройством 2 для кодирования видеосигналов.
С началом первого кадра с первого и второго выходов устройства 2 для кодирования видеосигналов на информационные входы первого 5 и второго 6 преобразователей код амплитуда поступают сигналы Yi и Xi. При этом на управляющие входы преобразователей код амплитуда поступает сигнал-код с выхода первого счетчика 4, содержание которого соответствует номеру q кадра  С выходов первого 5 и второго 6 преобразователей код - амплитуда на первый и второй входы первого сумматора 8 и сумматора-вычитателя 9 поступают сигналы YCi,XSi и XCi,YSi. Выходные сигналы YPi и XPi первого сумматора и сумматора-вычитателя поступают по шине данных на входы соответственно первого 12 и второго 13 блоков памяти, каналы данных которых открывают ненулевые выходные сигналы компаратора 7, на вход которого поступают сигналы Zi с третьего выхода устройства 2 для кодирования видеосигналов.
С выходов первого 5 и второго 6 преобразователей код - амплитуда на первый и второй входы первого сумматора 8 и сумматора-вычитателя 9 поступают сигналы YCi,XSi и XCi,YSi. Выходные сигналы YPi и XPi первого сумматора и сумматора-вычитателя поступают по шине данных на входы соответственно первого 12 и второго 13 блоков памяти, каналы данных которых открывают ненулевые выходные сигналы компаратора 7, на вход которого поступают сигналы Zi с третьего выхода устройства 2 для кодирования видеосигналов.
При этом ненулевые сигналы компаратора соответствуют условию сравнения Zi≅2. Одновременно выходной сигнал компаратора 7 поступает на вход второго счетчика 10, выход которого соединен с информационным входом первого блока 11 задания адреса, содержащего генератор констант k(k=0,1.), регистр сигнала n счетчика, арифметическое устройство, генератор синхроимпульсов. (K+2)-ой тактовый импульс генератора тактовых импульсов блока 3 управления устанавливает режим "чтение" в первом блоке 12 памяти и запускает генератор синхроимпульсов блока 11 задания адреса, на информационные входы которых поступает сигнал n второго счетчика 10. Арифметическое устройство выполняет операцию вычитания n-k(k≅n) и управления встроенным в блок генератором синхроимпульсов так, что каждый выходной сигнал k считывают из регистра адреса n-k раз. При этом выходной сигнал первого блока 11 задания адреса поступает по шине адреса в каналы адреса первого 12 и второго 13 блоков памяти, выходные шины данных которых соединены с входами первого 14 и соответственно второго 15 демультиплексоров. Выходные сигналы демультиплексоров, управляемых синхроимпульсами из блоков памяти, поступают на соответствующие первый 16 и второй 17 блоки вычитания. Выходные сигналы RYij, RXij первого и второго блоков вычитания поступают по соответствующим разветвленным шинам на входы первого 18 и второго 19 умножителей, выходные шины которых для передачи сигналов CYij, CXij соединены с входами второго сумматора 20.
Выходные сигналы Sij второго сумматора поступают по шине данных в канал третьего блока 21 памяти.
(K+4)-ый тактовый импульс генератора тактовых импульсов блока 3 управления устанавливает режим "чтение" в третьем блоке 21 памяти и запускает генератор синхроимпульсов второго блока 22 задания адреса.
Арифметическое устройство, входящее в состав второго блока задания адреса, выполняет следующие операции умножения и вычитания:
L1=(2n-l-1)l/2+1;
L2=n-l-1 при  ,
,
где L1, L2 соответствующие выходные сигналы арифметического устройства; l первые k выходных сигналов генератора констант, входящего в состав второго блока задания адреса, при этом (k+1)-й сигнал запирает выход арифметического устройства.
Сигнал L1 и выходной сигнал l генератора констант поступает на входы схемы сравнения, входящей в состав второго блока 22 задания адреса, выходной сигнал L которой ненулевой, если адрес l(l=1,(n-1)(n-2)), записываемый в регистр адреса, входящий в состав второго блока задания адреса, равен значению сигнала L1.
Сигналы L2 и L поступают на управляющие входы генератора синхроимпульсов, встроенного во второй блок задания адреса. При этом, если L2≠0 и L=0, то генератор синхроимпульсов однократно считывает адрес l из регистра адресов, входящего в состав второго блока задания адреса. В случае, если сигналы L2 и L одновременно ненулевые, то соответствующее считывание адреса l производят k1=L2 раз.
Выходной сигнал l второго блока задания адреса поступает по шине адреса в канал адреса третьего блока 21 памяти (на вход дешифратора адреса, входящего в его состав). Выходные сигналы третьего блока памяти по выходной шине данных поступают на вход третьего демультиплексора 23, выходные шины которого подсоединены к входам делителя 24. При этом на управляющий вход третьего демультиплексора поступает сигнал от генератора синхроимпульсов, входящего в состав третьего блока памяти.
Выходные сигналы Dl делителя 24 поступают по шине данных в канал данных четвертого блока 25 памяти.
(K+6)-ой тактовый импульс генератора тактовых импульсов блока 3 управления устанавливает режим "чтение" в четвертом блоке памяти и запускает третий блок 26 задания адреса.
Арифметическое устройство, входящее в состав третьего блока задания адреса, выполняет следующие операции суммирования и вычитания:
где L3 выходной сигнал арифметического устройства;
l, k,1 выходные сигналы генератора констант, входящего в состав третьего блока задания адреса, причем сигнал l в роли адреса одновременно поступает для записи в первый регистр адреса, входящий в состав третьего блока задания адреса.
Выходной сигнал L3 поступает на информационный вход второго регистра, входящего в состав третьего блока задания адреса.
Выходные сигналы первого и второго регистров адреса через мультиплексор, управляемый генератором синхроимпульсов, входящим вместе с мультиплексором в состав третьего блока задания адреса, по шине адреса поступают в канал адреса четвертого блока 26 памяти, выходная шина которого соединена с входом четвертого демультиплексора 27. Одновременная пара сигналов Dl, Dm, содержащихся в выходных шинах четвертого демультиплексора, управляемого через управляющий вход сигналом, поступающим с выхода генератора синхроимпульсов, входящего в состав четвертого блока памяти, представляет собой результирующий выходной парный сигнал Plm.
По величинам выходных парных сигналов Dl, Dm судят о признаках распознаваемого по изображению объекта.
В таком варианте технической реализации способ может быть применен в оптико-электронных системах разведки и прицеливания роботизированных комплексов вооружения для автоматического распознавания объектов разведки по их оптическим изображениям.
Использование способа селекции признаков распознавания объектов обеспечит по сравнению с известным способом следующие преимущества: повышение помехоустойчивости селектируемых признаков распознавания, расширение условий применения способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ КОНТУРАМ | 1990 |
|
RU2090927C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ПО ИХ КОНТУРАМ | 1992 |
|
RU2060551C1 |
| Устройство для селекции изображений объектов | 1986 |
|
SU1464183A1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| Устройство интерполяции для отображения графической информации | 1988 |
|
SU1525717A1 |
| Устройство для обработки изображений | 1988 |
|
SU1603408A1 |
| СПОСОБ ДЛЯ ЦИФРОВОЙ СУБСТРАКЦИОННОЙ АНГИОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043073C1 |
| СИСТЕМА ДИСПЛЕЯ | 1991 |
|
RU2119187C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ЦВЕТА ОБЪЕКТА | 1998 |
|
RU2142144C1 |
| Устройство интерполяции для отображения графической информации | 1985 |
|
SU1297089A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического распознавания и классификации объектов разведки в технических средствах разведки и прицеливания роботизированных комплексов вооружения. Способ выделения признаков для распознавания объекта позволяет повысить помехоустойчивость селектируемых признаков за счет анализа изображения не по всему контуру, а только по его опорным элементам, расширить условия применения не "частично видимых", а разномасштабных изображений. 3 ил.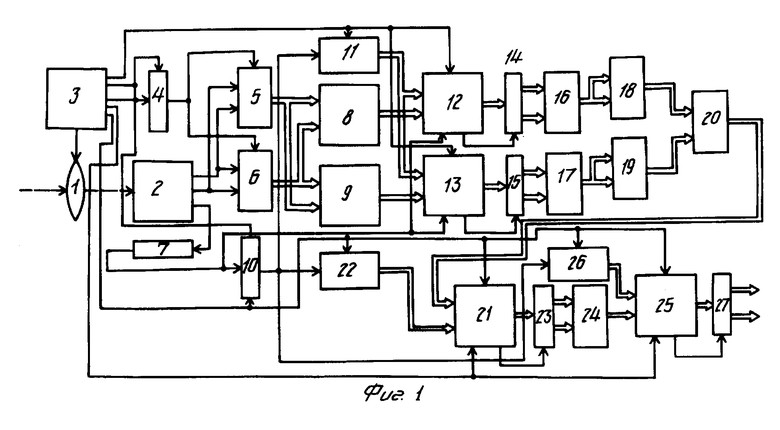
Способ выделения признаков для распознавания объекта, заключающийся в формировании в каждом кадре развертки кадровой совокупности электрических сигналов, амплитуда каждого из которых пропорциональна яркости соответствующего элемента изображения объекта, формировании первого и второго пороговых сигналов и формировании промежуточных совокупностей электрических сигналов путем сравнения по амплитуде электрических сигналов кадровых совокупностей с первым пороговым сигналом и выделения тех из них, амплитуды которых превышают амплитуду первого порогового сигнала, отличающийся тем, что, с целью повышения точности и надежности способа, перед каждой кадровой разверткой изображение объекта поворачивают на угол  где K количество кадров развертки, формируют последовательности строчных импульсов одинаковых по амплитуде в моменты времени, совпадающие с началами развертки соответствующих строк кадра, формируют последовательности тактовых импульсов, количество которых в каждой из последовательностей соответствует числу точек разложения изображения объекта по строке кадра, для каждого электрического сигнала промежуточных совокупностей формируют два координатных сигнала по координатам X и Y соответственно, амплитуды которых пропорциональны количеству строчных и тактовых импульсов, сформированных до момента формирования соответствующего электрического сигнала промежуточных совокупностей, для каждой промежуточной совокупности электрических сигналов формируют совокупность временных сигналов, длительности которых пропорциональны временам между моментами формирования соседних сигналов соответствующей промежуточной совокупности, в каждой из совокупностей временных сигналов выделяют сигнал минимальной длительности путем сравнения их с вторым пороговым сигналом, для каждого электрического сигнала минимальной длительности, кроме электрического сигнала минимальной длительности первой совокупности временных сигналов, формируют два приведенных координатных сигнала, амплитуды которых определяются как
где K количество кадров развертки, формируют последовательности строчных импульсов одинаковых по амплитуде в моменты времени, совпадающие с началами развертки соответствующих строк кадра, формируют последовательности тактовых импульсов, количество которых в каждой из последовательностей соответствует числу точек разложения изображения объекта по строке кадра, для каждого электрического сигнала промежуточных совокупностей формируют два координатных сигнала по координатам X и Y соответственно, амплитуды которых пропорциональны количеству строчных и тактовых импульсов, сформированных до момента формирования соответствующего электрического сигнала промежуточных совокупностей, для каждой промежуточной совокупности электрических сигналов формируют совокупность временных сигналов, длительности которых пропорциональны временам между моментами формирования соседних сигналов соответствующей промежуточной совокупности, в каждой из совокупностей временных сигналов выделяют сигнал минимальной длительности путем сравнения их с вторым пороговым сигналом, для каждого электрического сигнала минимальной длительности, кроме электрического сигнала минимальной длительности первой совокупности временных сигналов, формируют два приведенных координатных сигнала, амплитуды которых определяются как
Yнi = (Xi-Xc)•sinα+(Xc-Yi)•cosα;
Xнi = (Xi-Xc)•sinα+(Xc-Yi)•sinα,
где Xc и Yi амплитуды координатных сигналов,
Xc амплитуда сигнала постоянной длительности,
и формируют совокупность заключительных сигналов, амплитуды которых пропорциональны квадратам разностей амплитуд соответствующих приведенных координатных сигналов с учетом коэффициента нелинейности расстояний между характерными точками объекта и соответствующими им приведенными координатными сигналами, которые и являются выделенными признаками для распознавания объекта.
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Способ селекции признаков при распознавании изображений объектов | 1982 |
|
SU1078448A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
