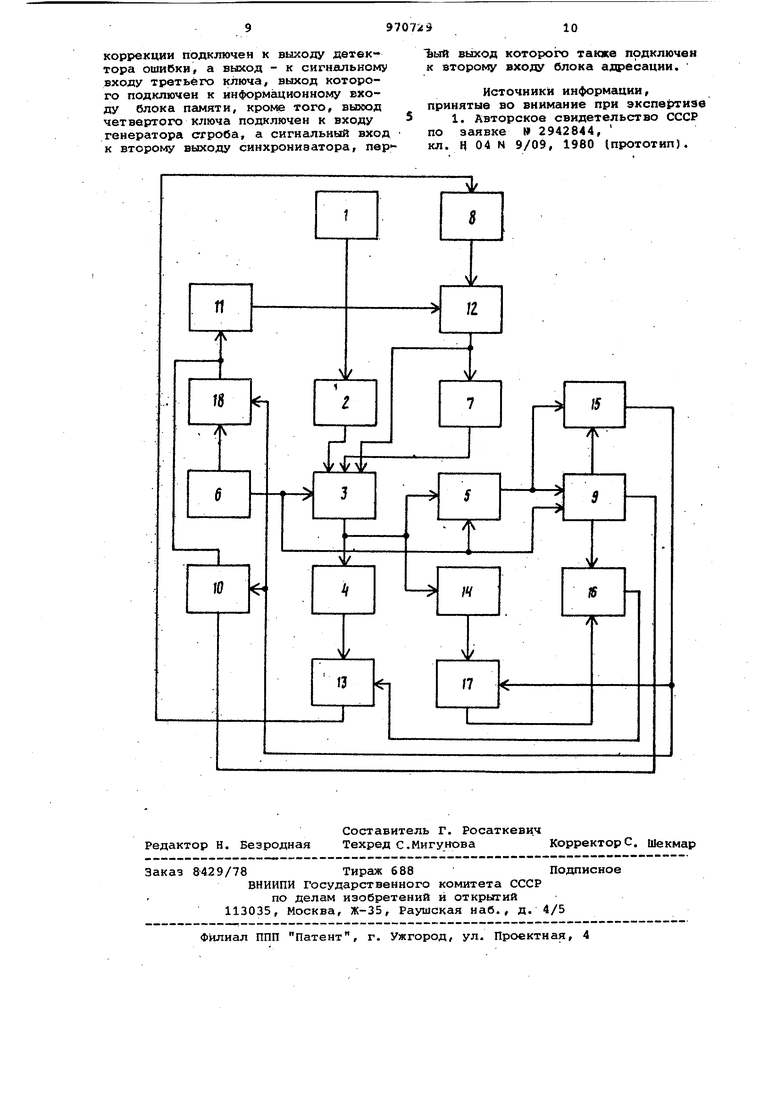
ния оптимсшьного совмещения вырабатывает соответствующую команду tj. Недостатком данного устройства является нгшичие дифференциальных геометрических искажений, вывванных различием ФОС, выражающееся в том, что различные участки растра совмещены по-разному. Так, например, в передающей камере КТ-132 допуск на несовмещение изображений, вызванное дифференциальными геометричес ними искажениями, составляет в. цент ральной зоне диаметром 0,8Н 30 не, в центральной зоне диаметром 1Н 80 НС и в остальной части растра до 160 НС, т.е. до 2 - 2,5 элемб нтов изображения. Цель изобретения - повышение точ ности совмещения растров. Указанная цель достигается тем, что в устройство для автоматическог совмещения растров, содержащее последовательно соединенные первый датчик ТВ сигнала, первый блок задержки, детектор ошибки и блок управления сигналом совмещения, вход которого подключен к первому входу детектора оптимгшьного сигнала совмещения, второй вход которого подключен к первому выходу синхронизатора, куда также подключен вход синхронизации детектора ошибки, второй вход которого соединен с выходом второго блока задержки-,, второй датчик ТВ сигнала, введены последовательно соединенные блок адре сации, первый ключ, генератор строба и второй ключ, выход которого ОД новременно подключен к входу второго блока задержки и третьему входу детектора ошибки, а сигнальный вход второго ключа соединен с выходом вт рого датчика ТВ сигнала, также введены сумматор, формирователь сигнал коррекции, блок управления режимом работы, блок памяти и третий и четвертый ключи, управляющие входы которых подключены к управляющему вхо ду первого ключа и выходу блока управления режимом работы, первый вхо которого подключен к выходу детектора оптимального сигнала совмещения и первому входу блока адресации второй выход которого подключен ко второму входу блока управления режи мом работы, а третий выход подключе к адресному входу блока памяти, выход которого подключен к первому входу сумматоар, второй вход которо го подключен к выходу блока управле ния сигналом совмещения, а выход к входу второго датчика ТВ сигнала, причем вход формирователя сигнала коррекции подключен к выходу детектора ошибки, а выход - к сигнальному входу третьего ключа, выход которого подключен к информационному входу блока памяти, кроме того, выход четвертого ключа подключен ко входу генератора строба, а сигнальный вход - ко второму выходу синхронизатора, первый В1ЛХОД которого также подключен ко второму входу блока адресации. На чертеже представлена структурная электрическая схема предлагаемого устройства. Устройство для автоматического совмещения растров содержит первый датчик 1 ТВ сигнала, первый блок 2 задержки, детектор 3 ошибки, блок 4 управления сигналом совмещения, детектор 5 оптимального сигнала совмещения, синхронизатор б, второй блок 7 задержки, второй датчик 8 ТВ сигнала, блок 9 адресации, первый ключ 10, генератор 11 строба, второй ключ 12, сумматор 13, формирователь 14 сигнала коррекции, блок 15 управления режимом работы, блок 16 памяти, третий .ключ 17 и четвертый ключ 18. Устройство работает следующим образом. ТВ сигналы с выходов датчиков 1 и 8 ТВ сигнала поступают на входы соответствуняцих блоков 2 и 7 задержки, где получают фиксированные задержки. Равенство или кратность величин задержек в блоках. 2 и 7 определяется конкретной схемой детектоар 3 ошибки. При наличии рассовмещения растров в да тчиках 1 и 8 ТВ сигнала на выходе детектора 3 ошибки возникает сигнал ошибки, которьгй воздействует на блок 4 управления сигналом совмещения, и через сумматор 13 сигнал с блока 4 управления сигналом совмещения совмещает растры в датчиках 1 и 8 ТВ сигнала. После достижения совмещения по центровке и размеру растра экстремальная система авторегулирования будет совершать незначительные колебательеые движения относительно оптимума совмещения. При этом на выходе детектора 3 ошибки будет с определенной частотой меняться знак сигнала ошибки, характеризующего рассовмещения. Сигнал с выхода детектора ошибки 3 поступает на первый вход детектора 5 оптимального сигнала совмещения,, на второй вход которого поступсиот сигналы от синхронизатора 6. Детектор 5 оптимального сигнала совмещения фиксирует наличие определенного числа смен знака сигнала на выходе детектора ошибки за некоторый период времени и вырабатывает сигнал достижения оптимального совмещения двух растров. Этот сигнал поступает на первый вход блока управления режимом работы 15 (который в простейшем случае может быть выполнен, например, в виде триггера или регистра), который меняет свое состояние именяет сигнал на своем
выходе с сигнала Совмещение на сигнал .Коррекция. При этом на управляющие входы первого 10, третьего 17 и четвертого 18 ключей поступает сигнал, который открывает первый 1Q и третий 17 ключи и закрывает четвертый 18. В режиме совмещения на генератор 11 строба через четвертый ключ 18 от синхронизатора 6 поступали импульсы, которые формировали пространственный строб большого размера в центре изображения, например размером в 0,5 общей площсши растра. В ро жиме Коррекция На генератор 11 ,. строба через открытый первый ключ 10 начинают поступать импульсы с первого выхода блока 9 адресации, которые соответствует пространственновременному положению, корректируемого участка изображения. Развертка формирования корректирующего сигнала, соответствующая развертке памяти в блоке 16 пагляти, начинается в левом верхнем углу изображения, а блок 16 памяти является устройством дискретного действия с ограниченным объемом памяти, .хотя, в принципе, это мог бы быть и аналоговый блок памяти, не обладающий в том числе и временной дискретизацией. Таким образом, на участке, соответствующем левому верхнему углу изобретения в начальный период формирования сигнала коррекции, возникает строб, который, воздействуя на второй ключ 12, будет пропускать на детектор 3 ошибт ки лишь ТВ сигнал, соответствуквдий во времени этому стробу. Детектор 3 ошибки будет определять лишь ошибку совмещения, соответствующую этому участйу изображения, и эта ошибка совме1аеиия будет прямо зависеть от цифференциальных... геометрических искажений, вызванных различием ФОС между собой. Сигнал ошибки с выхода детектора 3 ошибки поступает на первый вход детектора 5 оптимального сигнала совмещения и на формирователь 14 сигнала коррекции. С выхода формирователя 14 сигнала коррекции через третий ключ 17 сигнал коррекции поступает на информационный вход блока 16 памяти и записывается в ячейку памяти, соответствующую адресу, поступающему на адресный вход блоха 16 памяти с третьего выхода блока 9 адресации. В свою очередь, , формируемый блоком 9 адресации, определяет пространственно-временное положение строба на выходе генератора 11 строба и пост упает. на его вход через открытый первый ключ 10. Сигнал с выхода блока 16 пгиляти поступает на первый вход сумматора 13 и вместе с сигналом с; выхода блока 4 управления сигналом совмещения воздействует на второй датчик 8 ТВ сигнала и совмещает
его изображение с изображением пер- , вого датчика 1 ТВ сигнала в данномстробе. По достижении совмещения в стробе сигнал на выходе детектора 3 ошибки начинает вновь менять свой знак с некоторой частотой и срабатывает детектор 5 оптимального сигнала совмещения, сигнал с выхода которого воздействует на первый вход блока 9 адресации и меняет формируемый ею адрес и импульсы
0 положения строба на соседние.. Для
.формирования адресной системы на второй вход блока 9 адресации непрерывно поступают импульсы от синхронизатора 6. При поступлении сиг5нала оптимального совмещения данного участка от детектора 5 в соответствующей ячейке блока 16 амяти остается записанным сигнал коррекции, соответствующий сумме оптималь0ного совмещения данного участка изображения с сигнгшом с выхода бло ка 4 управления сигналом совмещения..
Так продолжается до тех пор, по5
ка не будет скорректирован весь растр. При окончании коррекции всего растра, т.е. при полном заполнении блока 16 памяти, блок 9 адресации на своем втором выходе сформи0рует сигнал окочания коррекции, который воздействует на второй вход блока 15 управления режимом работы и пе1 еведет его в режим работы Корректированное совмещение. При этом
5 на выходе блока 15 появятся сигналы, которые закроют первый 10 и третий 17 ключи и откроют четвертый ключ 18, генератор 11 строба вновь станет формировать строб большого размера, и устройство станет поддерживать
0 интегральное совмещение растров, но уже с коррекцией дифференциальных геометрических искажений, поскольку из блока 16 памяти в такт с разверткой передаваемого изображения на
5 сумматор 13 будут поступать сигналы коррекции, соответствующие развертываемому участку растра второго датчика 8 ТВ сигнала, и приводит положение этих участков в точное соот0ветствие положения ансшогичных участков растра первого датчика 1 ТВ сигнала.
Таким образом, сущность предлагаемого устройства заключается в том,
5 что совмещают известным.способом, например как в прототипе, два изображения в виде ТВ сигналов с эталонного и совмещенного растров и фиксируют интегральный сигнал совмещения.
0 Но добиться при этом идеального совмещения растров из-за дифференциальных геометрических искажений невозможно. Затем разбивают совмещенный растр на участки и совмещают каждый
5 его участок с соответствующим участком : i алойного растра. Значение корректирующего сигнала, необходимое для совмещения этих двух участков растра, запоминают. Так же формируют набор корректирующих сигналов (можно назвать его гиперповерхностью корректирующего сигнала ) для всей площади растра. После этого сигнал коррекции, соответствующий этой гиперповерхности, в такт с разверткой растра суммируют с интегральным сигналом совмещения и получают два совмещенных растра, где скорректированы дифференциальные геометрические искажения. Очевидно, что точность коррекции дифференциальных геометрических искажений будет определяться числом участков разбиения растров, и по мере роста их числа она будет возрастать, т.е. точность будет определяться объемом памяти блока 16. рамяти. Введение в устройство для автома тического совмещения растров новых функционс1льных узлов выгодно отличает предлагаемое устройство рт про тотипа, поскольку при незначительном усложнении оно получает возможность уменьшения дифференциальных геометр ческих искажений совмещенных растров, что улучшает геометрическое по добие .изображений каналов, передающих их, например, в различных зонах спектрального отражения сюжета. Это весьма важно при обработке изоб ражений, передаваемых спектрозональ ными камерами, использующимися, например, для выявления природных ресурсов. В случае применения такого устройства в цветных передающих камерах ТВ за счет лучшего геометричес кого подобия передаваемых цветоделен ных изображений улучшится цветопередача на изображения. Для обработки спектрозональных изображений, записанных на видеомагнитофон, с помощью ЭВМ при отсутствии коррекции дифференциальных гео метрических искажений потребуется их устранить путем коррекции в ЭВМ одного изображения под другое с помощью записанных на тот же видеомагнитофон эталонных изображений с той ке ТВ камеры. Для такой коррекции саждого изображения потребуется маJHHHoe время. При числе элементов изобргшений 500000, существующих дифференциальных геометрических иска жениях в 3 э;:емен та изображения и допустимых дифференциальных геометри ческих искажениях в 0,3 элемента чис ло элементов преобразованного изображения составит 50000000. Для машины типа ЕС-1022 быстродействие составляет 80.000 операций в секунду. Коэффициент использования этого быст родействия с учетом емкости ОЗУ и необходимости записи изображения на магнитный носитель составляет 0,5. Поэтому время формирования корректированного изображения составит 1250 с. При стоимости одного часа машинного времени на ЕС-1022 80 руб. стоимость коррекции одного изображения составит около 28 руб. При необходимости точной машинной обработки хотя бы тысячи спектрозональных изображений в год, полученных с помощью телекамер без коррекции дифференциальных геометрических искажений потери на машинную коррекцию составят около 28 тыс. руб. Применение спектрозональных ТВ камер, снабженных устройством автоматического совмещения растров с коррекцией дифференциальных геометрических искажений, поможет сэкономить эти средства. Формула изобретения Устройство для автоматического совмещения растров, содержащее последовательно соединенные первый датчик телевизионного (ТВ) сигнала, первый блок задержки, детектор ошибки и блок управления сигналом совмещения, вход которого подключен к первому входу детектора оптимального сигнала совмещения, второй вход которого подключен к первому выходу синхронизатора, соединенному с входом синхронизации детектора ошибки, йторой вход которого соединен с выходом второго блока задержки, второй датчик ТВ сигнала, отличающееся тем, что, с целью повышения точности совмещения растров, введены последовательно соединенные блок адресации, первый ключ, генератор строба и второй ключ, выход которого одновременно подключен к входу второго блока задержки и третьему входу детектора ошибки, а сигнсшьный вход второго ключа соединен с выходом второго датчика ТВ сигнала, также введены сумматор, формирователь сигнала коррекции, блок управления режимом работы, блок памяти, третий и четвертые ключи, управляющие входы которых подключены к управляющему входу первого ключа и выходу блока управления режимом работы, первый вход которого подключен к выходу детектора оптимального сигнала совмещения и первому входу блока адресации, второй выход которого подключен к второму входу.блока управления режимом работы, .а третий выход подключен к адресноглу входу блока памяти, выход которого подключен к первому входу сумматора, второй вход которого подключен к выходу олока .управления сигнсшом совмещения, а выход к входу второго датчика ТВ сигнала, причем вход -формирователя сигнала
коррекции подключен к вькоду детектора ошибки, а выход - к сигнальному входу третьего ключа, выход которого подключен к информационному входу блока памяти, кроме того, вьвоод четвертого ключа подключен к входу генератора сгроба, а сигнальный вход к второму выходу синхронизатора, перЪый выход которого также подключен к второму входу блока адресации.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2942844, кл. Н 04 N 9/09, 1980 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Способ формирования сигнала для коррекции искажений телевизионного изображения и устройство для его реализации | 1982 |
|
SU1109945A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1983 |
|
SU1231627A1 |
| Устройство для автоматической центровки телевизионных растров | 1983 |
|
SU1109944A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1984 |
|
SU1223403A2 |
| Устройство для формирования корректирующего сигнала телевизионного датчика | 1982 |
|
SU1125772A1 |
| Устройство автоматической гамма-коррекции телевизионного сигнала | 1986 |
|
SU1345375A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1317687A2 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1264373A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1989 |
|
SU1688451A2 |
