Изобретение относится к телевидению, а именно к устройствам для автоматического совмещения растров в многотрубочных, в т.ч. спектрозональных и цветных передающих телевизионньи (ТВ) камерах, и может быть использовано в тех областях, где есть необходимость в длительном поддержании точного совмещения и измерении точности совмещения изобр жений с выходов многотрубочных передающих ТВ камер. Известно устройство для автоматической центровки ТВ растров, содержащее последовательно соединенные первый датчик видеосигнала, первый блок задержки, детектор ошибки, блок управления сигналом совмещения, второй датчик видеосигнала и второй блок задержки, причем выход второго блока задержки подключен к второму входу детектора ошибки, а вход второго блока задерж ки - к третьему входу детектора ошибки, четвер1ый вход которого подключен к выходу синхронизатора 1. Относительное интегральное рассо ласование видеосигн1алов двух изобра жений оценивается детектором ошибки и используется для изменения ре жима на выходе блока -управления, который осуществляет совмещение рас ров по положению, т.е. центровку растров по гсфизонтали и вертикали Данное устройство осуществляет цент ровку с некоторой ощибкой, которая определяется зоной нечувствительности детектора ошибки и не может быть использовано для измерения остаточных рассовмещений. Наиболее близким по техническрй сущности к Iфeдпaгae « мy является устройство для автоматической центг ровки ТВ растров, содержащее последовательно соединенные второй датчи видеосигнала, блок управляемой задержки, детектсф ошибки, блок управ ления сигналом совмещения, первый датчик видеоснгн ша, выход которого непосредственно подключен к третьему входу детектора ошибки и через последовательно соединенные блок управления задержкой и блок управляемой задержки соединен с пер вым входом детектора ошибки. Устройство также содержит синхронизатор и детектор оптимального сигнала совмещения. Выход синхронизатора
подключен к входам синхронизации детектора ошибки и детектора оптимального сигнала совмещения. Кроме того, устройство содержит два концевых выключателя, т.е. детекторы нахождения на краю, два блока запрета, элемент ИЛИ и блоки установки в среднее положение возврата в оптимум. При этом входы первого и второго концевого выклю;Чателей под у1ючены к выходам блока управления задержкой, а выходы к входам элемента ИЛИ, выход которого соединен с входами первого и второго блоков запрета и входом обнуления детектора оптимального . сигнала совмещения. Выход элемента ИЛИ по цключен также к входу блока установки в среднее положение и к входу блока возврата в оптимум. Выход блока возврата в оптимум подключен к входу блока управления сигналом совмещения, а выход блока установлен в среднее положение и соединен с установочным входом блока управления задержкой. Известное устройство осуществляет совмещение растров первого и второго датчиков видеосигнайа по положению, т.е. центрирует растры, а также совмещает и размеры растров. Оценка рассовмещений производится в детекторе ошибки, который осуществляет сравнение функций взаимной корреляции видеосигналов, имеющих различную взаимную задержку. Сигнал с выхода детектора ощибки, характеризуюцрй рассовмещение воздействует на блок управления сигналом совмещения, который и изменяет величину сигналов совмещения, воздействуюпрпс на второй датчик видеосигнала . Характерной особенностью устройства является наличие детектора оптимального сигнала совмещения, который в момент нахождения в зоне оптимального совмещения вьфабатывает соответствующую команду, а также измерительный элемент, которым является первый блок управляемой задержки,2. Недостатками известного уйтройства являются недостаточная точность совмещения в зоне оптимального совмещения за счет существования зоны нечувствительности у детектора ошибки и невозможность измерения остаточных рассовмещений.
Целью изобретения является повышение точности центровки растров и обеспечение возможности измерения остаточных рассовмещений в произвольной зоне растра.
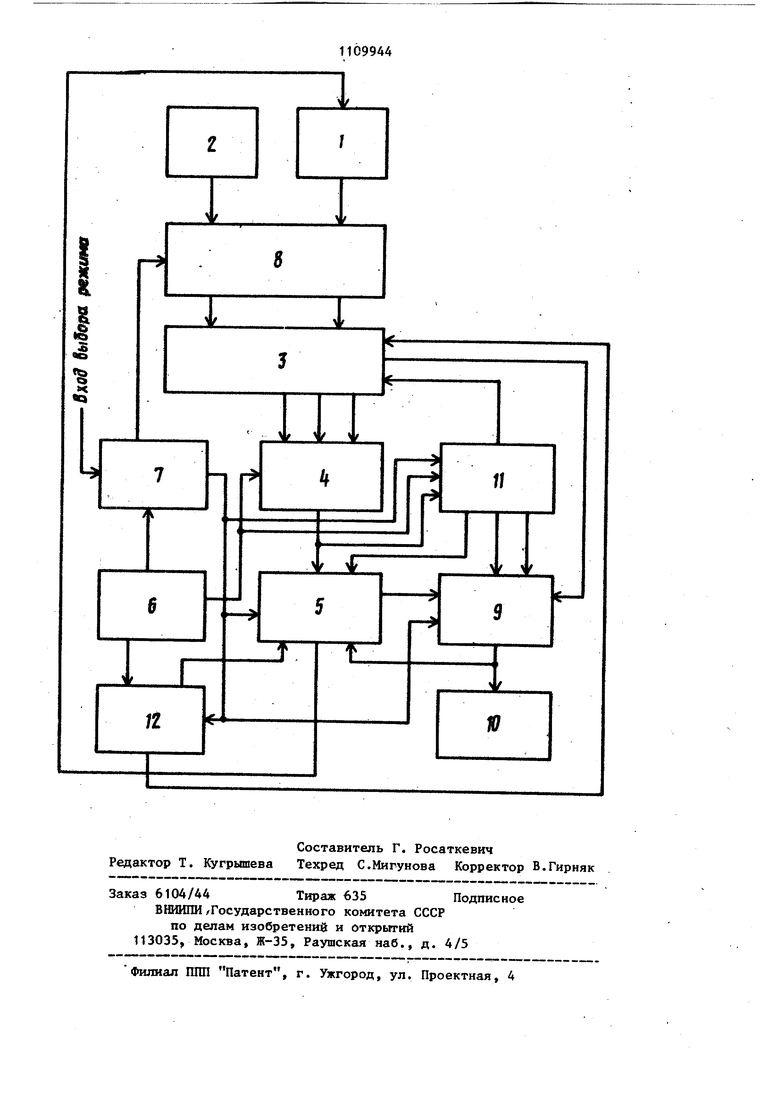
Поставленная цель достигается тем, что в устройство для .автоматической центровки ТВ растров по стро ке или по кадру, содержащее первый и второй датчики видеосигнала, последовательно соединенные блок управляемой задержки, детектор ошибки и блок управления сигналом совмещения, первый выход которого подключен к входу первого датчика видеосигнала, синхронизатор, первый выход которого соединен с синхровходом детектора ошибки, первый сигнальный вход которого соединен с выхо-. дом фиксированной задержки блока згаравляемой задержки, второй сигнал ный вход - с выходом нулевой задерж ки и третий сигнальный вход с выходом управляемой задержки упомянутого блока, введены генератор управляемого строба, стробируемый коммутатор, коммутатор, экстремальный регулятор, формирователь усредненного отсчета и индикатор рассовмещений, причем стробирующий выход генератора управляемого строба подключен к входу управления стробируемого коммутатора, два входа которого подключены к выходам первого и второго датчиков видеосигнала соответственно, а два выхода - к входам блока управляемой задержки, четвертый выход которого подключен к первому входу формирователя усред ненного отсчета, выход которого подключен к входу индикатора рассов мещений и второму входу блока управления сигналом совмещения, второй выход которого соединен с вторым входом значений формирователя усредненного отсчета, третий и четвертьй входы которого соединены с первьм и вторым выходами экстрема ного регулятора соответственно, тре тий выход которого подключен к третьему входу блока управляемой задержки, четвертый вход которого соединен с первым выходом коммутатора, второй выход которого подключен к третьему входу блока з равления сигналом совмещения, первый вход соединен с вторым выходом синх ронизатора, а второй вход - с вторым выходом генератора управляемого строба, четвертым входом блока управления сигналом совмещения, пятым входом формирователя усредненного отсчета и первым входом экстрема льного регулятора, четвертый выход которого соединен с пятым входом блока управления сигналом совмещения, второй вход соединен с выходом детектора ошибки, а третий вход - с первым выходом синхронизатора , третий выход которого соединен с первым входом генератора управляемого строба, второй вход которого является входом выбора 5 Режима работы.. На чертеже представлена структурная электрическая схема устройства для автоматической центровки ТВ растров. Устройство для автоматической центровки ТВ растров содержит первый датчик 1 видеосигнала, второй датчик 2 видеосигнала, блок 3 управляемой задержки, детектор 4 ошибки, блок 5 управления сигналом совмещения, синхронизатор б генератор 7 управляемого строба, стробируемый коммутатор 8, формирователь 9 усредненного отсчета, индикатор 10 рассовмещений, экстремальный регулятор 11 и коммутатор 12, Устройство работает следующим образом. Видеосигнал с выходов первого и второго датчиков 1 и 2 поступает на соответствующие входы блока 3 управляемой задержки через стробируемый коммутатор 8, пропускающий видеосигнал лишь с участка растра, который соответствует положению строба, формируемого генератором 7. Вход выбора режима работы генератора 7 определяет работу устройства в режимах Совмещение или Измерение. Рассмотрим работу устройства в режиме Совмещение. Видеосигналы, поступившие с выходов стробируемого коммутатора 8, получают фиксированные задержки, равенство или кратность величин которых зависит от конкретного вьтолнения детектора 4 ошибки. Для этого задержка на выходе блока 3 управляемой задержки ставится в среднее положение. При наличии рассовмещений детектор 4 вырабатывает сигнал ошибки, знак которого соответствует знаку рассовмещения. Этот сигнал поступает на
первый вход блока 5 управления сигналом совмещения. Сигнал с его выхода изменяется и совмещает растры обоих датчиков видеосигнала. После достижения совмещения экстремальная система управления совершает колебательные движения относительно оптимума совмещения. При этом на выходе детектора 4 ошибки меняется знак сигнала ошибки с некоторой частотой. В режиме Совмещение тактовые импульсы хода, следующие с частотой кадров, поступают с синхронизатора 6 через коммутатор 12 в блок 5 управления сигналом совмещения . При этом в блоке 5 меняется значение сигнала совмещения и соответственно код на его втором-выходе, который поступает на второй вхо формирователя 9 усредненного отсчет При этом сигнал знака сигнала ошибки поступает на второй вход экстремального регулятора 11, на первый вход которого от синхронизатора 6 1 поступают тактовые синхроимпульсы с кадровой частотой. В моменты реверса, т.е. смены знака сигнала ошибки, экстремальный регулятор 11 выдает сигнал на третий вход формирователя 9 и в это же время меняется значение на его четвертом входе. .При этом в формирователе 9 значение сигнала совмещения- с выхода блока 5 суммируется с предьщущих значений и заносится в память, а результат этой суммы делится на новое значение числа реверсов и на выходе появляется новое, еще более усредненное значение сигнала совмещения в виде кода, которое поступает на второй вход блока 5 и там заносится в память. Таким образом, усреднение получанных результатов повышает точность определения значения сигнала управления совмещением. За счет усреднения по ряду крайних отсчетов зоны оптимального совмещения, находя1ф1хся по обе стороны от точки оптимального совмещения, устройство останавливается именно в этой точке. В момент времени, когда совмещение считается дос.тигнутым, т.е. когда экстремальный регулятор 11 наберет необходимое, наперед заданное чиЬло реверсов, с его четвертого выхода на пятый вход блока 5 поступает импульс, который фиксирует значение кода сигнала совмещения в его памяти. Этот же им(
пульс взаимодействует с сигналом генератора 7 управляемого строба, поступающим на четвертый вход блока 5 и подает сигнал совмещения, соответствующий оптимальной точке, на вход первого датчика 1 видеосигнала. Все вышеописанное одинаково относится как к совмещению в строчном, так и в кадровом направлении. Меняется лишь точка прилоя11ения сиг. нала управления совмещением с выхода блока 5 управления сигналом совмещения в первом датчике 1 видесигнала. После полного завершения работы устройства центровки оператор может перевести устройство в ре..гким Измерение, воздействовав нд вход выбора режима работы генератора 7 управляемого строба. Режим работы устройства Измерение по существу ничем не отличается от режима работы Совмещение. Меняется лишь исполнительное устройство. Если в режиме Совмещение исполнительным устройством замкнутой системы авторегулирования, какой является данное устройство центровки, служит блок 5 управления сигналом совмещения, то в режиме Измерение исполнительным устройством становится 3 управляемой задержки, который в данном случае выполняет заодно и роль измерительного злемента. При измерении остаточных рассовмещений в строчном направлении оператор переводит устройство в режим Измерение воздейсвием на вход выбора режима работы генератора 7 управляемого строба и выставляет строб и тот участок растра, где необходимо измерить рассовмещение. Величина задержки на выходе блока 3 ставится в среднее положение в начальный момент. .При Наличии рассовмещения в зоне . строба на выходе детектора 4 возникает сигнал ошибки. При этом с первого выхода коммутатора 12 по команде Режим из генератора 7 тактовые импульсы хода поступают на четвертый вход блока 3 управляемой задержки. По этим импульсам раз в кадр меняется на один дискрет величина управляемой задержки относительно ее среднего значения со знаком, соответствуяздим знаку ошибки, поступакщему с выхода детектора 4 ошибки на второй вход экстремального регулятора 11 и оттуда на третий
вход блока 3. Линия задержки в блоке 3 имеет отводы через жестко оговоренные калиброванные значения, поэтому она служит измерительной, и по тому, на каком отводе от центрального положения в ту или иную сторону наблюдается совмещение сигналов с двух растров, можно вынести суждение о величине рассовмещения. При этом определенному значению задержки на выходе, блока 3 управляемой задержки соответствует значе(ше кода на информационном выходе того же блока. В остальном работа происходит точно так же, как и в режиме Совмещение. Когда величина задержки на выходе блока 3 управляемой задержки установлена такой, что наблюдается совмещение, устройство начинает автоколебаться и формирователь 9 формирует усредненное значение сшибки рассовмещения из кодов поступающих с четвертого выхода блока 3 управляемой задержки. Для проведения нового цикла измерений оператор воздействует на вход выбора режима работы генератора 7 и переводит строб в новое место. При этом с генератора 7 на первый вход экстремального регулятора 11 поступает сигнал, который взводит этот блок, и сигнал ошибки с выхода детектора 4 через зкстремальньй регулятор 11 начинает поступать на третий вход блока 3. Код с четвертого выхода блока 3, соответствующий величине задержки, поступает в формирователь 9 усредненного отсчета, где в момент каждого реверса, т.е. смены знака ошибки, суммируется со значением предьщущей кодов, хранящейся в памяти формирователя 9. Сумма значений рассовмещений делится на число реверсов .Величина рассовмещений в выбранной зоне растра выводится.на индикатор 10 рассовмещений. ; Введени15 в устройство для автоматического совмещения ТВ растров новых функциональных узлов выгодно отличает предлагаемое устройство от известного, поскольку при незначительном усложнении оно позволяет повысить точность совмещения растров за счет усреднения получаемых результатов и обеспечить за счет тех же вновь введенных функциональных элементов путем изменения исполнительного звена возможность измерения остаточных рассовмещений в пропроизвольнЫ) зоне растра. Устройство также может служить измерителем рассовмещений растров и у других переданщих ТВ камер, не снабженных подобным устройством. Для этого необходимо .лищь подать на входы блоков стробирования видеосигналы цветоотделенных каналов той передающей ТВ камеры, рассовмещения растров в которой необходимо измерить . Точность измерения рассовмещення растров в изобретении определяется дискретностью отводов у линии задержки и может быть достаточно высокой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического совмещения растров | 1981 |
|
SU970729A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Способ формирования сигнала для коррекции искажений телевизионного изображения и устройство для его реализации | 1982 |
|
SU1109945A1 |
| Устройство для автоматического совмещения растров | 1979 |
|
SU902316A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1983 |
|
SU1231627A1 |
| Кинотелевизионная камера | 1987 |
|
SU1559429A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1989 |
|
SU1688451A2 |
| Устройство для измерения координат объекта | 1990 |
|
SU1737754A1 |
| Устройство передачи и приема сигнала изображения | 1988 |
|
SU1596488A1 |
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЦЕОТРОВКИ ТЕЛЕВИЗИОННЫХ РАСТРОВ, содержащее первый и второй датчики видеосигнала, последовательно соединенные блок управляемой задержки, детектор ошибки и блок управления сигналом совмещения, первый вьосод которого подключен к входу первого датчика видеосигнала, синхронизатор, первьй выход которого соединен с синхровходом детектора ошибки, отличаю щеес я тем, что, с целью повьшения точности центровки и обеспеченияli измерения остаточных рассовмещений в произвольной зоне растра, в него введены генератор управляемого строба, стробируемый коммутатор., коммутатор, экстремальный регулятор, формирователь усредненного отсчета и индикатор рассовмещений, причем стробирующий выход генератора управляемого .строба подключен к входу управления стробируемоРо коммутатора, два входа которого подключены к выходам первого и второго датчиков видеосигнала соответственно, а два выхода - к входам блока управляемой задержки, четвертый выход которого подключен к первому входу формирователя усредненного отсчета, выход которого подключен к входу индикатора рассовмещений и второму входу блока управления сигналом совмещения .второй выход которого соединен с вторым входом формирователя усредненного отсчета, третий и четвертый входы которого соединены с первым и вторым выходами экстремального регулятора соответственно, третий выход которого подключен к третьему входу блока управляемой задержки, четвертьй вход которого соединен с первым выходом коммутатора , второй выход которого подключен к третьему входу блока управления сигналом совмещения, первый вход соединен с вторым выходом синхронизатора, а второй вход - с вторым выходом генератора управляемого строба, четвертым входом блока о 4 равления сигналом совмещения пятым входом Формирователя усредненного отсчета и первьв4 входом экстремального регулятора, четвер4i. тый выход которого соединен о пятым входом блока управления сигналом совмещения, второй вход соединен с выходом детектора ошибки, а третий вход - с первьш выходом синхронизатора, третий.выход которого соединен с первым входом генератора управляемого строба, второй вход которого является входом сигнала выбора режийа работы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 915282, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
