Изобретение относится к контро.пю и управлению процессом бурения скважин и может быть использовано для контроля и предотвращения прихватов бурового инструмента во время спуско-подъемных операций.
Известно устройство для предотвращения прихватов бурового инструмента, содержащее датчик веса, нульорган управления реверсом, блок уставки Порога, пороговый элемент, преобразователь код-аналог, нульорган аварийного сигнала, ключ, реверсивный счетчик, исполнительный элемент, генератор и блок сигнализации,, позволяющее контролировать затяжки инструмента при подъеме 1.
Недостатком данного устройства является то, что предупреждение прихватов возможно лишь для операции подъема и тсшько при резком возрастании веса на крюке, хотя прихваты, вызванные плохой очисткой забоя от шлама, характеризуются медленным нарастанием веса на крюке, что не определяется данным устройством.
Наиболее близким к изобретению по техническому решению и достигаемому эффекту является устройство
предупреждения прихватов бурового инструмента, содержащее датчик веса, соединенный через первую схему совпадения с входом блока вычитания, блок веса, корректор, выход которого связан через блок веса, вычитатель и коммутатор с переключателем, а вход - с выходом датчика веса, блок управления, соединенный первый выхо10дом с входом блока веса и вычитателя, а вторым - с входом инвертора, триггера и второй схемы совпадения и схему ИЛИ, выход которой связан с исполнительным механизмом через пе15реключатель, триггер, вторую схему совпадения и блок индикации 2.
Недостатками данного устройства являются наличие ручных операций переключение Спуск-подъем к
20 подключение коммутатора к младшим разрядам вычитателя, а также низкая достоверность распознавания прихватов, так как с изменением длины колонны допустимая величина сил сопротив25ления изменяется, что равносильно адаптивному подключению коммутатора к нужному разряду вычи1:ателя и в данном устройстве не производится.
Цель изобретения - повышение дос-,
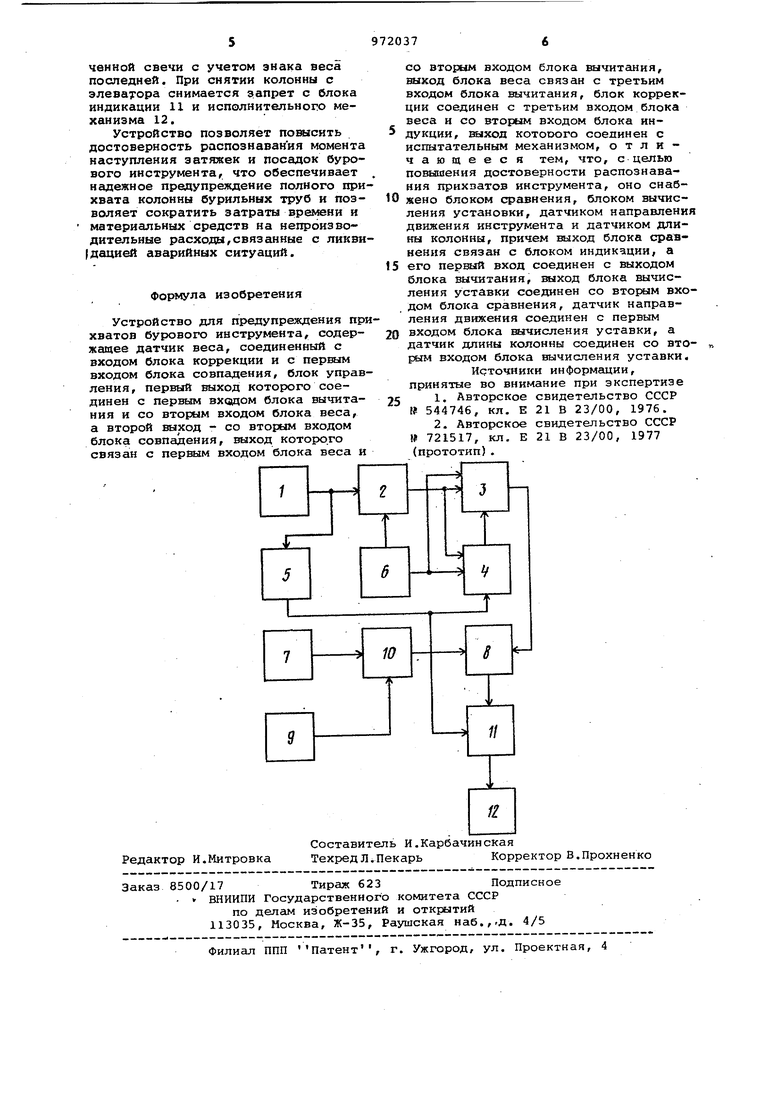
30 товерности распознавания прихватов И исключение ручных операций при ра боте устройства. Поставленная цель достигается те что устройство снабжено блоком срав нения, блоком вычисления уставки, датчиком направления движения инструмента, и датчиком длины колонны, причем выход блока сравнения связан с блоком индикации, а его первый вход соединен со вторым входом блока сравнения, датчик направления движения соединен с первым входом блока вычисления уставки, а датчик длины колонны соединен со вторим входом блока вычисления уставки, На чертеже представлена структур ная схема устройства. Устройство содержит датчик веса соединенный с первым входом зхемы совпадения 2, выход которой связан с вторым входом блока вычитания 3 и первым входом блока веса 4, а выход датчика веса соединен с входом корректора 5. Второй вход cxeNM сов падения 2 соединен с вторым выходом блока управления 6, первый вход которого связан соответственно с пер,вым входом блока вычитания 3 и втор входом блока веса 4. Выход блока ве са 4 соединен с третьим входом блока вычитаний 3, выход которого связан с первым входом блока сравнения 8. Второй вход Йпока сравнения 8 связан с выходом блока вычисления уставки 10, первый и второй входыкоторого соответственно соединены с выходом датчика направления движения 7 и выходом датчика длины колонны 9. Выход блока сравнения 8 связан с первым входом блока индикации 11, выход которого сое динен с входом исполнительного механизма 12. Выход корректора 5 связан с вторым входом блока индикации 11 и третьим входом блока веса 4. Устройство работает следующим образом. От датчика веса 1 на вход схемы совпадения 2 поступает сигнал, частота которого пропорциональна весу бурового инструмента. На второй вход схемы совпадения 2 от блока уп равления б подаются импульсы калиброванной длительности .(временные ворота ). Перед началом работы густройства инструмент приподнимает ся на забое по команде оператора в блок веса 4 с дат:чика веса 1 через схему совпадения 2 вносится информа ция о полном весе бурового инстру-мента. По окончании временных ворот по команде с блока управления 6 информация об исходном весе переносится с блока веса 4 в блок вычитания 3. в течение следуввдего импульса временных ворот из величины исходного веса, занесенно- го в блок вычитания 3, вычитается информация о текущем весе бурового инструмента, поступающая на вход блока вычитания 3 от датчика 1 через схему совпадения 2, Одновременно сигнал о текущем весе записывается в блок веса 4. По окончании временных ворот сигналом с блока управления 6 из блока вычитания 3 выводится информация о величине разности между исходным и текущим весом бурового инструмента и в него вновь вводится информация с блока веса 4. Далее цикл работы устройства повторяется. Разность исходного и текущего веса бурового инструмента поступает на первый вход блока сравнения 8, на второй вход которого подается значение уставки с блока вычисления уставки 10. Значение уставки G,, в блоке вычисления уставки вырабатывается адаптивно в соответствии с направлением движения колонны, сигнал о котором формируется в датчике направления движения 7 и длине колонны с датчика длины колонны 9 по следующим формулам. При спуске G V, (L + ) , При подъеме G,, (L - fee. L - длина колонны на начало спуска (подъема) свечи; PCS. Длина свечи; , допустикые значения коэффициентов сопротивления движения колонны для спуска и подъема соответственно; q - средний вес колонны труб с учетом замков. Если знак разности между разностью исходного и текущего веса с блоком вычитателя 3 и уставкой с блока уставки 10 отрицателен, то блок сравнения 8 вырабатывает аварийный сигнал Затяжка или Посадка на блок индикации 11 и через него на исполнительный механизм 12. Если знак разности положителен, то это означает, что силы сопротивления не превышают допустимое значение и аварийный сигнал не вырабатывается. Корректор 5 служит для корректировки исходного веса в пропускоподъемных операциях и блокировки исполнительного механизма 12 и блока индикации 11 при полной загрузке талевой системы. При постановке колонны на элеватор сигнал с датчика 1 резко изменяется и становится ниже заданного в корректоре 5 значения. При этом последний выдает сигнал на блок индикации 11 и блок веса 4. Этим сигналом блокируется блок индикации 11 и исполнительный механизм 12,а в блоке веса 4 осуществляется корректировка исходного веса, ранее записанного в него, на величину отвинченной или навинченной свечи с учетом знака веса последней. При снятии колонны с элеватора снимается запрет с блока индикации 11 и исполнительного механизма 12.
Устройство позволяет поилсить достоверность распознавания момента наступления затяжек и посадок бурового инструмента, что обеспечивает надежное предупреждение полного прихвата колонны бурильных труб и позволяет сократить затраты времени и материальных средств на непроизводительные расходы,связанные с ликви(дацией аварийных ситуаций.
Формула изобретения
Устройство для предупреждения прихватов бурового инструмента, содержащее датчик веса, соединенный с входом блока коррекции и с пернлм входом блока совпадения, блок управления, первый выход которого соединен с первым входом блока вычитания и со вторым входом блока веса, а второй выход - со вторым входом блок совпадения, выход которого связан с первым входом блока веса и
со вторым входом блока вычитания, выход блока веса связан с третьим входом блока вычитания, блок коррекции соединен с третьим входом блока веса и со вторым входом блока индукции, выход KOTODoro соединен с испытательным механизмом, отличающееся тем, что, с целью повышения достоверности распознавания прихватов инструмента, оно снабжено блоком сравнения, блоком вычисления установки, датчиком направления движения инструмента и датчиком длины колонны, причем выход блока сравнения связан с блоком индикации, а
5 его первый вход соединен с выходом блока вычитания, выход блока вычисления уставки соединен со вторым входом блока сравнения, датчик направления движения соединен с первым
0 входом блока вычисления уставки, а датчик длины колонны соединен со вторым входом блока вычисления уставки.
Источники информации, принятые во внимание при экспертизе
5 1. Авторское свидетельство СССР 544746, кл. Е 21 В 23/00, 1976.
2. Авторское свидетельство СССР 721517, кл, Б 21 В 23/00, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство предупреждения прихватов бурового инструмента | 1977 |
|
SU721517A1 |
| Стабилизатор веса бурильного инструмента | 1988 |
|
SU1559129A2 |
| Устройство для предупреждения прихватов бурового инструмента | 1983 |
|
SU1113508A1 |
| Устройство для управления процессом турбинного бурения | 1983 |
|
SU1104247A1 |
| Устройство для измерения глубины скважины | 1980 |
|
SU875001A1 |
| Устройство для предупреждения прихватов бурильного инструмента | 1985 |
|
SU1242605A1 |
| Система контроля процесса бурения нефтяных и газовых скважин | 1974 |
|
SU644942A1 |
| Устройство для предупреждения прихватов бурильного инструмента | 1988 |
|
SU1602966A1 |
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
| Стабилизатор веса бурильного инструмента | 1981 |
|
SU1033717A1 |
