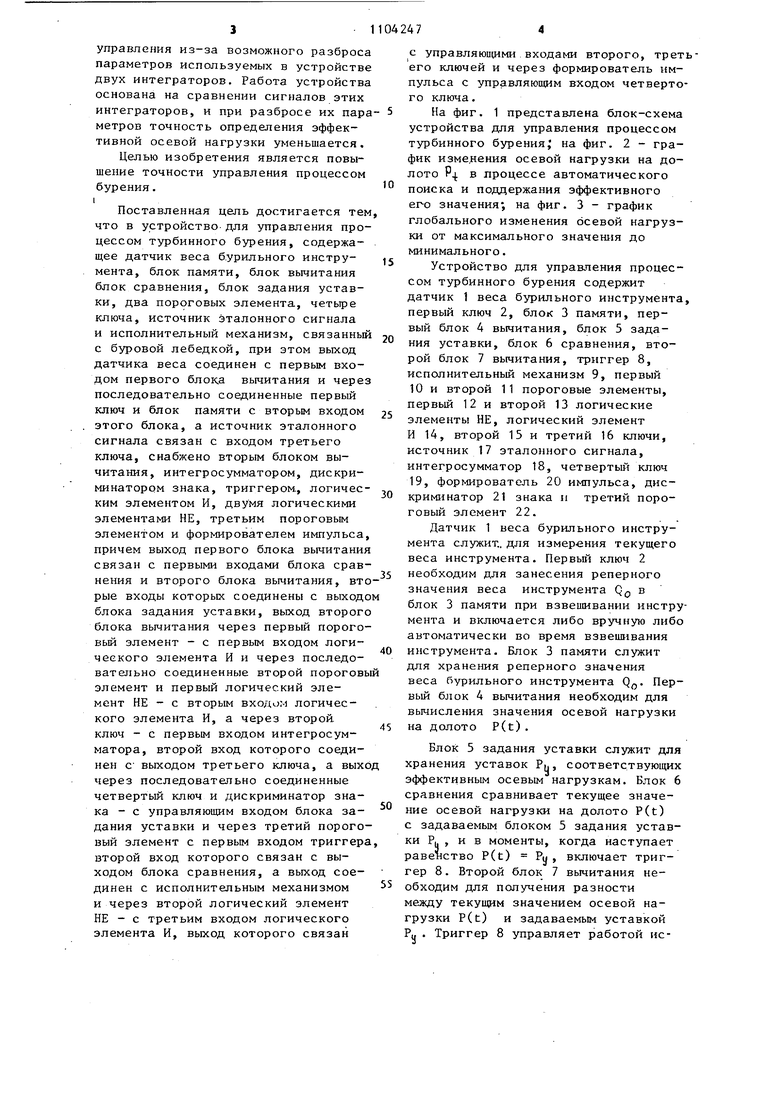
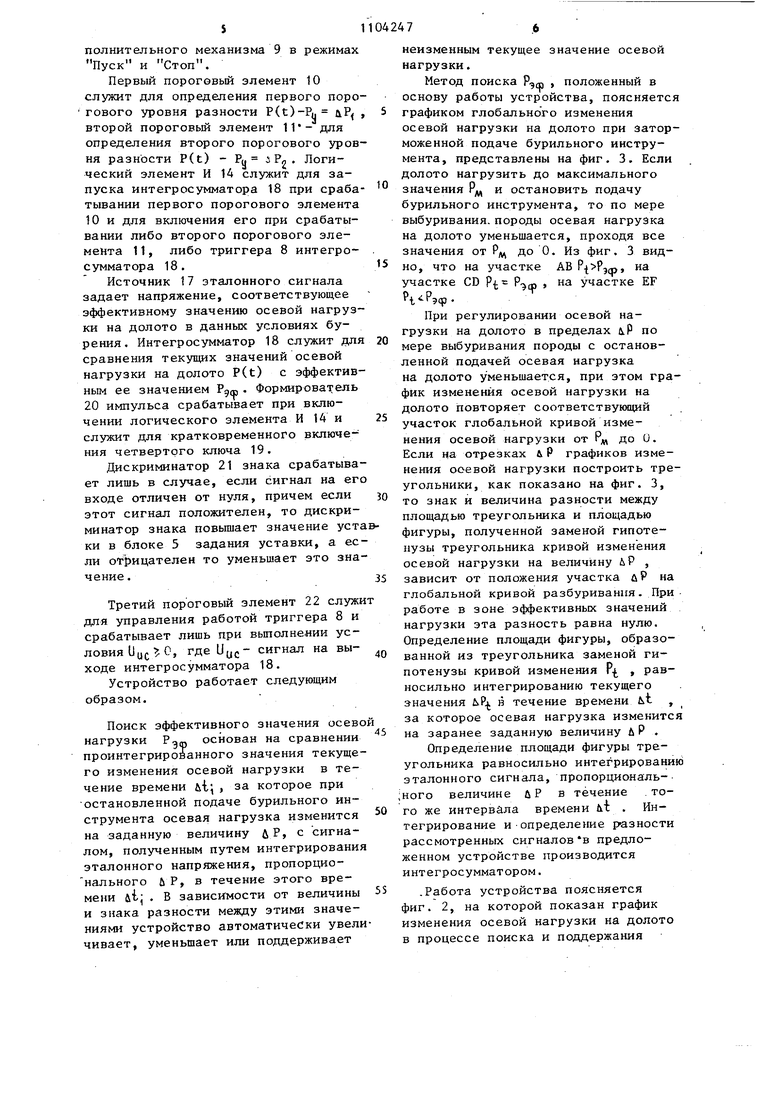
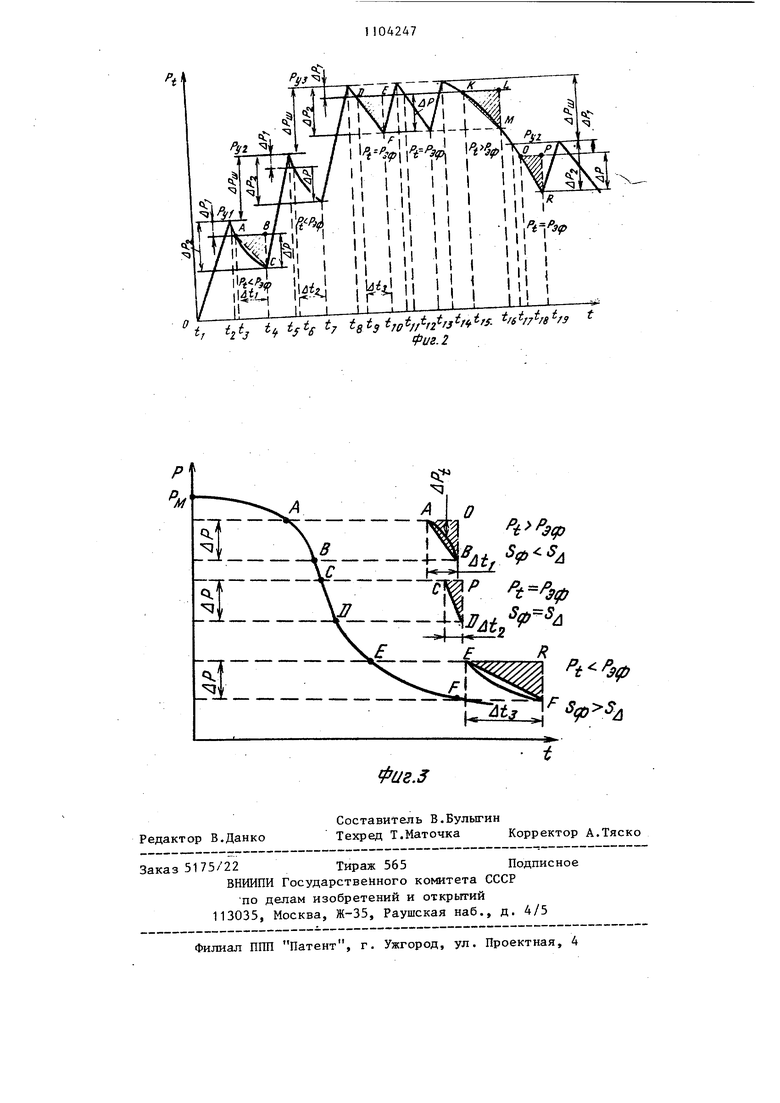
1 Изобретение относится к области турбинного бурения глубоких скважи при разведке и добыче полезных иско паемых и может быть использовано в системах оперативного управления бу рением для автоматического поиска и поддержания эффективной осевой нагрузки на долото. Эффективной является осевая нагрузка на долото, которая соответствует максимальной скорости разбур вания породы. Известны устройства для поиска эффективных значений осевой нагрузки на долото, основанные на анализе изменения осевой нагрузки в процессе специального режима бурения. К таким устройствам относится, например, прибор режима бурения тип ПРБ-2, содержа1ф1Й датчик контроля осредненной величины механической скорости бурения, датчик осевой нагрузки на долото,- пульт управления и индикаторное табло. Для поиска эффективной осевой нагрузки на долото турбобур загружается до режима, близкого к тормоз ному, и подача инструмента прекращается . Начинается поиск оптимально нагрузки по кривой, записываемой загорающимися на прямоугольном световом табло лампами.. По мере выбури вания породы осевая нагрузка на дол то уменьшается и последовательно проходит все значения от максимальных до минимальных. При этом скорость движения нижнего конца буриль ной колонны описывается уравнением У„ -с1, « где VA, - мгновенная скорость углуб ления долота; С - коэффициент, учитывающий параметры бурильной колон Р - осевая нагрузка на долото В тот момент времени, когда осевая нагрузка равна эффективному зна чению темп ее изменения максимальный (iP /dt max. После нахож дения устройство включается на режим замера скорости 1J Недостатки устройства заключаютс в низкой степени автоматизации, так как оценка эффективности осевой нагрузки на долото-возложена на чел века (оператора) в процессе поиска эффективной осевой нагрузки величина ее доводится до предтормозных 7 значений, что ускоряет износ бурового инструмента и может привести к аварии на забое} в целом процесс поиска весьма длителен, так как при выбуривании породы с остановленной подачей осевая нагрузка на долото, уменьшаясь, должна пройти все значения от максимальных до минимальных. Известно также устройство для управления процессом турбинного бурения, содержащее импульсньй орган подачи, датчик усилий на крюке, пороговый элемент, командный генератор, экстремальный регулятор, схему совпадения и датчик частоты срабатывания органа подачи, выход которого подключен к информационному входу экстремального регулятора, а вход через схему совпадения соединен, соответственно, с выходами командного генератора и порогового элемента 2J. К недостаткам данного устройства следует отнести длительность процесса поиска экстремума характеристики скорость бурения - осевая . нагрузка , связанную с необходимостью анализа частот срабатывания органа подачи на двух последовательных временных интервалах, с последующим выбором направления изменения осевой нагрузки на долото и продолжением сравнения частот последовательных интервалов до прихода в экстремум. Наиболее близким к изобретению является устройство для управления процессом турбинного бурения, содержащее датчик веса бурильного инструмента, блок памяти, блок вычитания, блок сравнения, блок задания уставки, два пороговых элемента, четыре ключа, источник эталонного сигнала и исполнительный механизм, связанный с буровой лебедкой, при этом выход датчика веса соединен с первым входом блока вычитания и через последовательно соединенные первый ключ и блок памяти с вторым входом этого блока, а источник эталонного сигнала связан с входом третьего ключа pj. Недостатки известного устройства связаны с необходимостью ручного управления процессом бурения после получения информации об эффективной осевой нагрузке и низкой точностью управления из-за возможного разброса параметров используемых в устройстве двух интеграторов. Работа устройства основана на сравнении сигналов этих интеграторов, и при разбросе их пара метров точность определения эффективной осевой нагрузки уменьшается. Целью изобретения является повышение точности управления процессом бурения. I Поставленная цель достигается тем что в устройство для управления процессом турбинного бурения, содержащее датчик веса б.урильного инструмента, блок памяти, блок вычитания блок сравнения, блок задания уставки, два пороговых элемента, четыре ключа, источник эталонного сигнала и исполнительный механизм, связанный с буровой лебедкой, при этом выход датчика веса соединен с первым входом первого блока вычитания и чере последовательно соединенные первый ключ и блок памяти с вторым входом этого блока, а источник эталонного сигнала связан с входом третьего ключа, снабжено вторым блоком вычитания, интегросумматором, дискриминатором знака, триггером., логичес ким элементом И, двумя логическими элементами НЕ, третьим пороговым элементом и формирователем импульса причем выход первого блока вычитани связан с первыми входами блока срав нения и второго блока вычитания, вт рые входы которых соединены с выход блока задания уставки, выход второг блока вычитания через первый порого вьй элемент - с первым входом логического элемента И и через последовательно соединенные второй порогов элемент и первый логический элемент НЕ - с вторым входом логического элемента И, а через второй, ключ - с первым входом интегросумматора, второй вход которого соединен С выходом третьего ключа, а вых через последовательно соединенные четвертый ключ и дискриминатор знака - с управляющим входом блока задания уставки и через третий порого вый элемент с первым входом триггер второй вход которого связан с выходом блока сравнения, а выход соединен с исполнительным механизмом и через второй логический элемент НЕ - с третьим входом логического элемента И, выход которого связан с управляюп(ими входами второго, третьего ключей и через формирователь импульса с управляющим входом четвертого ключа. На фиг. 1 представлена блок-схема устройства для управления процессом турбинного бурения; на фиг. 2 - график изменения осевой нагрузки на долото Р в процессе автоматического поиска и поддержания эффективного ег-о значения; на фиг. 3 - график глобального изменения осевой нагрузки от максимального значения до минимального. Устройство для управления процессом турбинного бурения содержит датчик 1 веса бурильного инструмента, первый ключ 2, блок 3 памяти, первый блок 4 вычитания, блок 5 задания уставки, блок 6 сравнения, второй блок 7 вьиитания, триггер 8, исполнительный механизм 9, первый 10 и второй 11 пороговые элементы, первый 12 и второй 13 логические элементы НЕ, логический элемент И 14, второй 15 и третий 16 ключи, источник 17 эталонного сигнала, интегросумматор 18, четвертый ключ 19, формирователь 20 импульса, дискриминатор 21 знака и третий пороговый элемент 22. Датчик 1 веса бурильного инструмента служит., для измер-ения текущего веса инструмента. Первьш ключ 2 необходим для занесения реперного значения веса инструмента Q в блок 3 памяти при взвешивании инструмента и включается либо вручную либо автоматически во время взвешивания инструмента. Блок 3 памяти служит для хранения реперного значения веса бурильного инструмента Q. Первый блок 4 вычитания необходим для вычисления значения осевой нагрузки на долото P(t). Блок 5 задания уставки служит для хранения уставок Рк, соответствующих эффективным осевым нагрузкам. Блок 6 сравнения сравнивает текущее значение осевой нагрузки на долото P(t) с задаваемым блоком 5 задания уставки Рц , ив моменты, когда наступает равенство P(t) Ру, включает триггер 8. Второй блок 7 вычитания необходим для получения разности ме.жду текущим значением осевой нагрузки P(t) и задаваемым уставкой PU . Триггер 8 управляет работой исполнительного механизма 9 в режимах Пуск и Стоп. Первый пороговьй элемент 10 служит для определения первого поро гового уровня разности P(t)-Pg йР второй пороговый элемент 11- для определения второго порогового уров ня разности P(t) - Ру jPg. Логический элемент И 14 служит для запуска интегросумматора 18 при сраба тывании первого порогового элемента 10 и для включения его при срабатывании либо второго порогового элемента 11, либо триггера 8 интегросумматора 18. Источник 17 эталонного сигнала задает напряжение, соответствующее эффективному значению осевой нагруз ки на долото в данных условиях бурения. Интегросумматор 18 служит дл сравнения текущих значений осевой нагрузки на долото P(t) с эффектив ным ее значением Pgm . Формирователь 20 импульса срабатывает при включении логического элемента И 14 и служит для кратковременного включения четвертого ключа 19. Дискриминатор 21 знака срабатыва ет лишь в случае, если сигнал на ег входе отличен от нуля, причем если этот сигнал положителен, то дискриминатор знака повышает значение уст ки в блоке 5 задания уставки, а ес ли отрицателен то уменьшает это зна чение. Третий пороговый элемент 22 служи для управления работой триггера 8 и срабатывает лишь при выполнении условия Uuc С, где и и с - сигнал на выходе интегросумматора 18. Устройство работает следующим образом. Поиск эффективного значения осево нагрузки Рдоэ основан на сравнении проинтегрированного значения текущего изменения осевой нагрузки в течение времени &i , за которое при остановленной подаче бурильного инструмента осевая нагрузка изменится на заданную величину & Р, с сигналом, полученным путем интегрирования эталонного напряжения, пропорционального UР, в течение этого времени &tj . В зависимости от величины и знака разности между этими значениями устройство автоматически увели чивает, уменьшает или поддерживает неизменным текущее значение осевой нагрузки. Метод поиска Рд , положенный в основу работы устройства, поясняется графиком глобального изменения осевой нагрузки на долото при заторможенной подаче бурильного инструмента, представлены на фиг. 3. Если долото нагрузить до максимального значения Р, и остановить подачу бурильного инструмента, то по мере выбуривания, породы осевая нагрузка на долото уменьшается, проходя все значения от Р,у до 0. Из фиг. 3 видно, что на участке АВ на участке CD Р , , на участке EF . При регулировании осевой нагрузки на долото в пределах Р по мере выбуривания породы с остановленной подачей осевая нагрузка на долото уменьшается, при этом график изменения осевой нагрузки на долото повторяет соответствующий участок глобальной кривой изменения осевой нагрузки от Р до 0. Если на отрезках & Р графиков изменения осевой нагрузки построить треугольники, как показано на фиг. 3, то знак и величина разности между площадью треугольника и площадью фигуры, полученной заменой гипотенузы треугольника кривой изменения осевой нагрузки на величину ЛР , зависит от положения участка лР на глобальной кривой разбуривания. При работе в зоне эффективных значений нагрузки эта разность равна нулю. Определение площади фигуры, образованной из треугольника заменой гипотенузы кривой изменения Р , равносильно интегрированию текущего значения Pj. в течение времени 6t , за которое осевая нагрузка изменится на заранее заданную величину Л Р . Определение площади фигуры треугольника равносильно интегрирований эталонного сигнала, пропорциональ- ного величине йР в течение .того же интервала времени tiL . Интегрирование и определение р-азности рассмотренных сигналовв предлоенном устройстве производится интегросумматором. .Работа устройства поясняется иг. 2, на которой показан график зменения осевой нагрузки на долото процессе поиска и поддержания 7 эффективного ее значения. После спуска бурильной колонны в скважину производится измерение и запоминание полного веса бурильной колонны Q(j, когда долото еще не касается забоя скважины. При кратковременном открывании первого ключа 2 сигнал с датчика 1 веса запоминается блоком 3 памяти. Так как осевая нагрузка на долото создается частью веса бурильной колонны, то после нагружения долота вес колонны уменьшается на величину осевой нагрузки на долото. На выходе первого блока 4 вычитания устанавливается сигнал, пропорциональный осевой нагрузке на долото . Pt QO -Qf Перед началом бурения с помощью блока 5 задания уставки устанавливается уставка осевой нагрузки Р, характерная для данного сочетания д ол от о -п ор ода. Предположим, что включение устрой ства произведено в момент времени if как показано на фиг. 2. При включении устройства триггер 8 находится в единичном состоянии, при котором на его выходе присутствует сигнал, который через исполнительньш механизм 9растормаживает буровую лебедку, -вследствие чего начинается подача бурильного инструмента и увеличение осевой нагрузки на долото Pt . Если начальное значение уставки бло ка 5 задания уставки составляет гу то осевая нагрузка на долото увеличивается до тех пор, пока текущее ее значение Pt не сравняется со зна чением уставки PU, . При выполнении условия РН срабатывает блок сравнения, переводящий своим сигналом триггер 8 в нулевое состояние. На выходе триггера появляется нулевой сигнал, подача инструмента прекращается (момент времени ig фиг. 2), одновременно второй логический элемент НЕ 13 подает на третий вход логического элемента И 14 единичный сигнал. Единичный сигнал присутствует также на вто ром входе логического элемента И 14 Этот сигнал подается с первого логического элемента НЕ 12. 7 В момент времени to начинается разбуривание породы с остановленной подачей инструмента. На выходе второго блока 7 вычитания устанавливается сигнал, пропорциональный разности уставки и текущего значения осевой нагрузки на долото iPt Py-P. Этот сигнал сравнивается с пороговыми уровнями Лр, и с помощью первого 10 и второго 11 пороговых элементов. При разбуривании породы осевая нагрузка на долото P-t уменьшается, а величина Р увеличивается. В момент вьшолнения условия срабатывает первый пороговый элемент 10, на выходе которого появляется сигнал, подаваемьм на первый вход логического элемента П 14. Таким образом, на всех трех входах логического элемента И 14 имеются сигналы, вследствие чего логический элемент И 14 срабатывает, открывая своим выходным сигналом второй 15 и третий 16 ключи. Это соответствует моменту времени Ц на фиг. 2. С этого момента начинается интегрирование разности двух сигналов с помощью интегросумматора 18. Первый сигнал, пропорциональный ЬР , поступает с выхода блока 7 вычитания через второй ключ 15, а второй сигнал Ug - с выхода источника 17эталонного сигнала через третий ключ 16. На выходе интегросумматора 18формируется сигнал, определяемый выражением (uPt-U,dt. Интегрирование начинается в момент выполнения условия ,, а не при выполнении условия , для того, чтобы исключить погрешности интегрирования, которые могут появиться вследствие неточного определения начала интегрирования при торможении движущейся колонны буриль- ных труб. Во время подачи бурильного инструмента при достижении осевой нагрузкой значения Р, колонна бурилыных труб останавливается, однако
из-за инерционных свойств бурильной колонны и невозможности ее мгновенной остановки текущее значение осевой нагрузки может превзойти значение уставки. Для исключения погрешностей интегрирование сигналов начинается только при остановленной подаче бурильного инстру;ента, когда уже началось разбуривание породы, что определяется выполнением условия
.
Интегрирование разности указанных сигналов ведется в течение времени ut, при котором осевая нагрузка на долото уменьшается на заранее заданную величину &Р . Величина йР задается установкой уровней срабатывания первого и второго пороговых элементов 10 и 11.
,2- PiПри выполнении условия
I
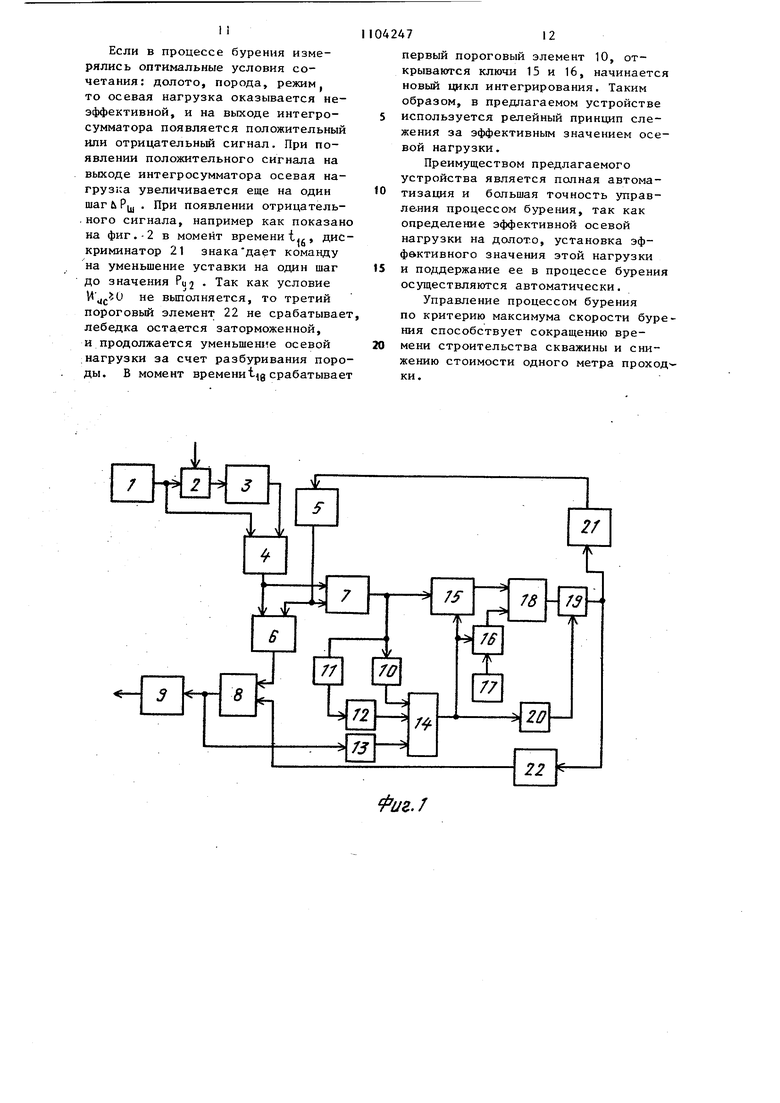
срабатывает второй пороговый элемент 11, который через логический элемент НЕ 12 устанавливает на втором входе логического элемента И 14 нулевой сигнал. На выходе логического элемента И 14 также устанавливается нулевой сигнал, ключи 15 и 16 закрываются, а интегрирование сигналов интегросумматором 18 прекращается. Это соответствует моменту времени t фиг. 2. Одновременно формирователь 20 импульса генерирует одиночный импульс, который открывает четвертый ключ 19. Дискриминатор 21 знака определяет знак сигнала на выходе интегросумматора.
Из фиг. 2 видно, что площадь треугольника ABC меньше, чем площадь фигуры, образованной заменой гипотенузы этого треугольника кривой изменения осевой нагрузки при разбуривании породы, поэтому сигнал на выходе интегросумматора бует положительным. Согласно фиг.З то соответствует бурению с осевой агрузкой, меньшей эффективного знаения. Дискриминатор 21 знака подат сигнал на блок 5 задания уставки а увеличение уставки на один шагйР. а выходе блока задания устайки устаавливается новое 3 1ачение уставки
Pij2 как показано на фиг. 2. Третий пороговый элемент 22 срабатывает в том случае, когда выходной сигнал интегросумматора больше или равен нулю, т.е. когда выполняется условие
Uu,o.
На фиг. 2 показано, что в момент времени t это условие выполняется, и третий пороговый элемент 22 переводит триггер 8 в единичное состояние. Сигнал-с выхода триггера через исполнительный механизм 9 растормаживает буровую лебедку, и начинается подача бурильного инструмента до тех пор, пока текущее значение осево нагрузки Р| не сравняется с новым значением уставки . В момент времени tg , как показано на фиг. 2, выполняется условие
К.
и срабатывает блок 6 сравнения, переводя триггер 8 в нулевое состояние Бурильная колонна останавливается, и начинается новый цикл разбуривания породы с остановленной подачей. В случае, если после окончания интегрирования разности сигналов на выходе интегросумматора окажется положительный сигнал, то по команде дискриминатора 21 знака уставка блока 5 задания уставок увеличивается еще на один шаг U PI,I и принимает значение Р,,,, , как
Ul
IJ3
показано на фиг. 2.
Предположим, что в Следующем цикле разбуривания породы с остановленной подачей значения осевой нагрузки на долото оказались эффективными, тогда график изменения осевой нагрузки совпадает с гипотенузой треугольника DEFj, и сигнал на выходе интегросумматора после интегрирования равен нулю. В этом случае дискриминатор 21 знака не изменяет уставку блока 5 задания уставок, и бурение ведется в одном и том же диапазоне изменения осевой нагрузки, который соответствует ее эффективным значениям. В момент времени ,0 как показано на фиг. 2, выходной сигнал интегросумматора равен нулю, при этом срабатывает третий пороговый элемент 22, переводя триггер 8 в единичное состояние. Сигнал на выходе триггера через исполнительный механизм производит подачу бурильного инструмента, и осевая нагрузка увеличивается до значения уставки PIJ .
Если в процессе бурения измерялись оптимальные условия сочетания: долото, порода, режим то осевая нагрузка оказывается неэффективной, и на выходе интегросумматора появляется положительный или отрицательный сигнал. При появлении положительного сигнала на выходе интегросумматора осевая нагрузка увеличивается еще на один шаг Ь PQ, . При появлении отрицатель.ного сигнала, например как показано на фиг.-2 в момент времени t.g, дискриминатор 21 знакадает команду на уменьшение уставки на один шаг до значения Рц2 . Так как условие И(.50 не вьшолняется, то третий пороговый элемент 22 не срабатывает лебедка остается заторможенной, и продолжается уменьшение осевой :нагрузки за счет разбуривания породы. В момент времениt gсрабатывает
первый пороговый элемент 10, открываются ключи 15 и 16, начинается новый цикл интегрирования. Таким образом, в предлагаемом устройстве используется релейный принцип слежения за эффективным значением осевой нагрузки.
Преимуществом предлагаемого устройства является полная автоматизация и большая точность управления процессом бурения, так как опред€шение эффективной осевой нагрузки на долото, установка эффективного значения этой нагрузки
и поддержание ее в процессе бурения осуществляются автоматически.
Управление процессом бурения по критерию максимума скорости бурения способствует сокращению времени строительства скважины и снижению стоимости одного метра проходки.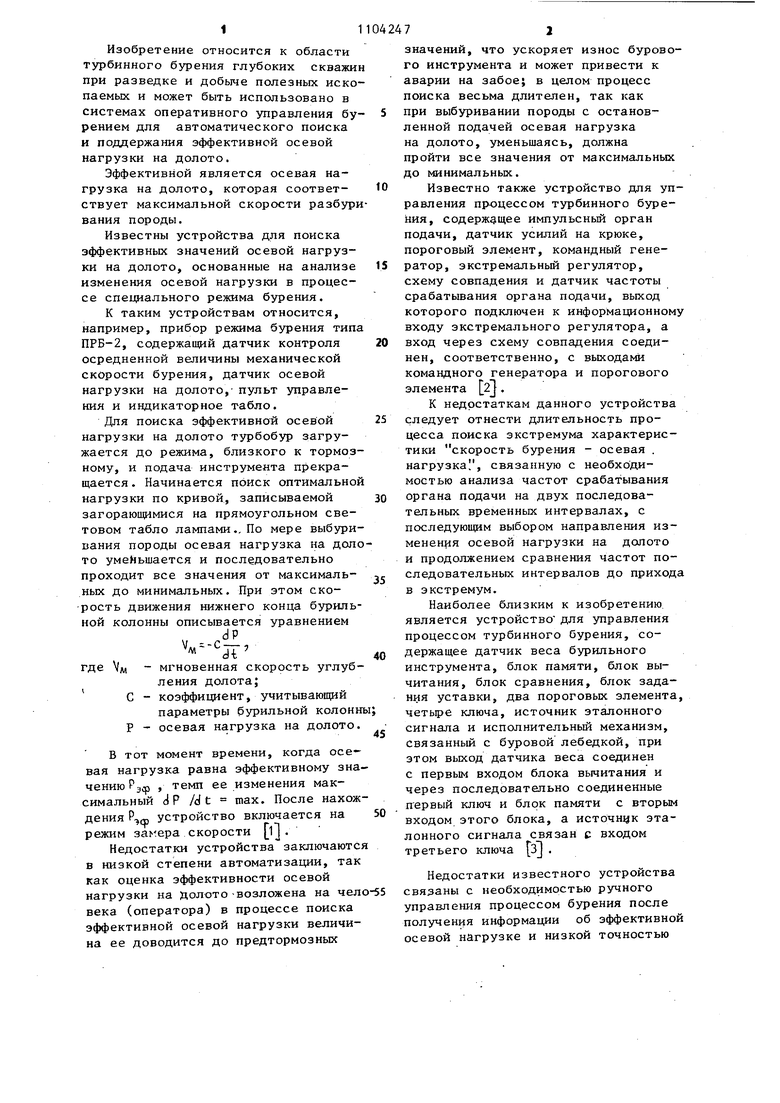
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установления эффективной нагрузки на долото | 1990 |
|
SU1789016A3 |
| Устройство для измерения осевой нагрузки на долото | 1979 |
|
SU870682A1 |
| Способ автоматического поддержания заданной нагрузки на долото и устройство для его осуществления | 1986 |
|
SU1361314A1 |
| Устройство для измерения механической скорости бурения | 1980 |
|
SU907226A1 |
| Стабилизатор веса бурильного инструмента | 1988 |
|
SU1559129A2 |
| Устройство для измерения осевой нагрузки на долото | 1982 |
|
SU1033719A1 |
| Стабилизатор веса бурильного инструмента | 1981 |
|
SU1033717A1 |
| Устройство для измерения углубления долота при бурении глубоких скважин | 1982 |
|
SU1040126A1 |
| Система управления процессом турбинного бурения | 1982 |
|
SU1114785A1 |
| Устройство для моделирования процесса поиска эффективной осевой нагрузки на долото | 1980 |
|
SU899877A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ТУРБИННОГО БУРЕНИЯ, содержащее датчик веса бурильного инструмента, блок памяти, блок вычитания, блок сравнения, блок задания уставки, два пороговых элемента, четыре ключа, источник эталонного сигнала и исполнительньм механизм, связанный с буровой лебедкой, при этом выход датчика веса соединен с первым входом блока вычитания и через последовательно соединенные первый ключ и блок памяти - с вторым входом этого блока, а источник эталонного сигнала связан с входом третьего отличающееся ключа, тем, что, с целью повышения точности управления, оно снабжено вторым блоком вычитания, интегросумматором, дискриминатором знака, триггером, логическим элементом И, двумя логическими элементами НЕ, третьим пороговым элементом и формирователем импульса, причем выход первого блока вычитания связан с первыми входами блока сравнения и второго блока вычитания, вторые входы которых соединены с выходом блока задания уставки, выход второго блока вычитания связан через первьш пороговый элемент с первым входом логического элемента И и через последовательно соединенные г второй пороговый элемент и первый логический элемент НЕ - с вторым (О входом логического элемента И, а через второй ключ - с первьм входом интегросумматора, второй вход которого соединен с выходом третьего ftp ключа, а выход через последовательно соединенные четвертый ключ и дискриминатор знака - с управляющим входом блока задания уставки и через третий пороговьм элемент iU с первым входом триггера, второй ND вход которогр связан с выходом блока J сравнения, а выход соединен с исполнительным механизмом и через второй логический элемент НЕ - с третьим входом логического элемента И, выход которого связан с управляющими входами второго и третьего ключей и через формирователь импульса - с управляющим входом четвертого ключа.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Погарский А.А | |||
| Автоматизация процесса бурения глубоких скважин | |||
| М., Недра, 1972, с | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
