(54) СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ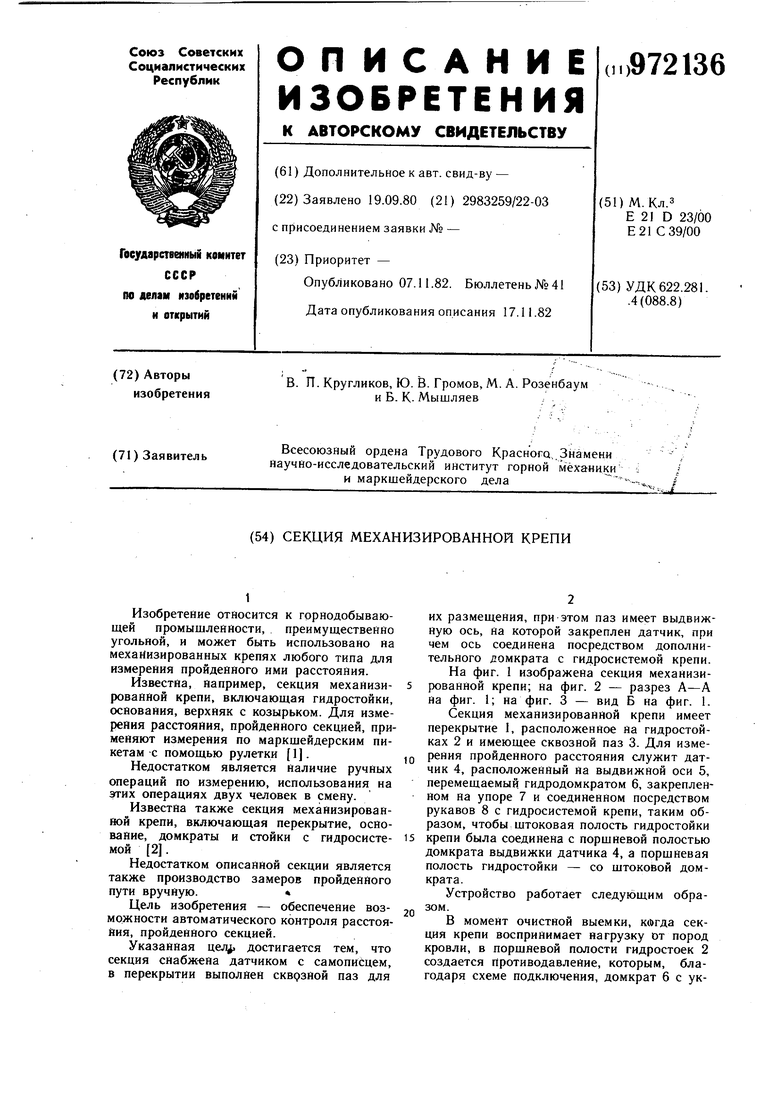
| название | год | авторы | номер документа |
|---|---|---|---|
| Секция механизированной крепи | 1983 |
|
SU1132024A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Секция механизированной крепи | 1986 |
|
SU1315618A1 |
| Устройство для управления секцией механизированной крепи | 1982 |
|
SU1116172A1 |
| Устройство для восстановления сек-ции МЕХАНизиРОВАННОй КРЕпи | 1979 |
|
SU815314A1 |
| Секция шахтной механизированной крепи | 1978 |
|
SU911039A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ МОЩНЫХ ПЛАСТОВ | 1990 |
|
RU2010976C1 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |
| Механизированная штрековая крепь | 1990 |
|
SU1721254A1 |
| Секция механизированной крепи | 1989 |
|
SU1643733A1 |
1
Изобретение относится к горнодобывающей промышленности, . преимущественно угольной, и может быть использовано на механизированных крепях любого типа для измерения пройденного ими расстояния.
Известна, например, секция механизированной крепи, включающая гидростойки, основания, верхняк с козырьком. Для измерения расстояния, пройденного секцией, применяют измерения по маркшейдерским пикетам с помощью рулетки I.
Недостатком является наличие ручных операций по измерению, использования на этих операциях двух человек в смену.
Известна также секция механизированной крепи, включающая перекрытие, основание, домкраты и стойки с гидросистемой 2.
Недостатком описанной секции является также производство замеров пройденного пути вручную.
Цель изобретения - обеспечение возможности автоматического контроля расстояйия, пройденного секцией.
Указанная u.ej, достигается тем, что секция снабжена датчиком с самописцем, в перекрытии выполнен скврзной паз для
их размещения, при этом паз имеет выдвижную ось, на которой закреплен датчик, при чем ось соединена посредством дополнительного домкрата с гидросистемой крепи.
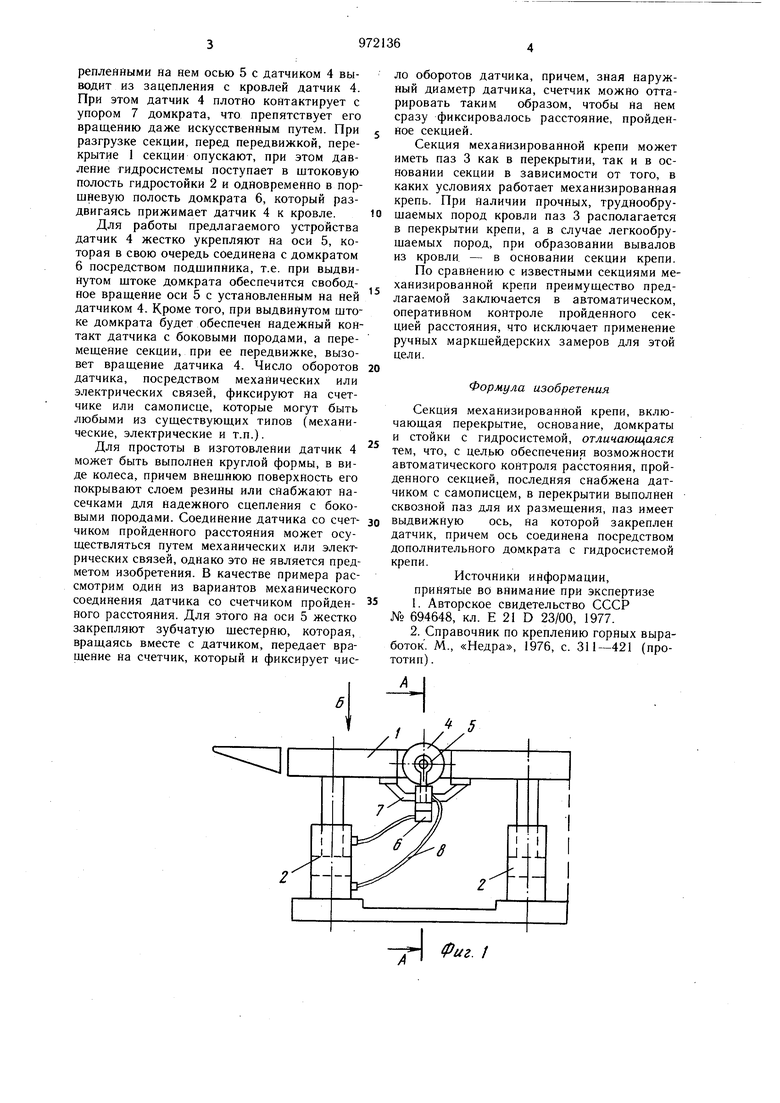
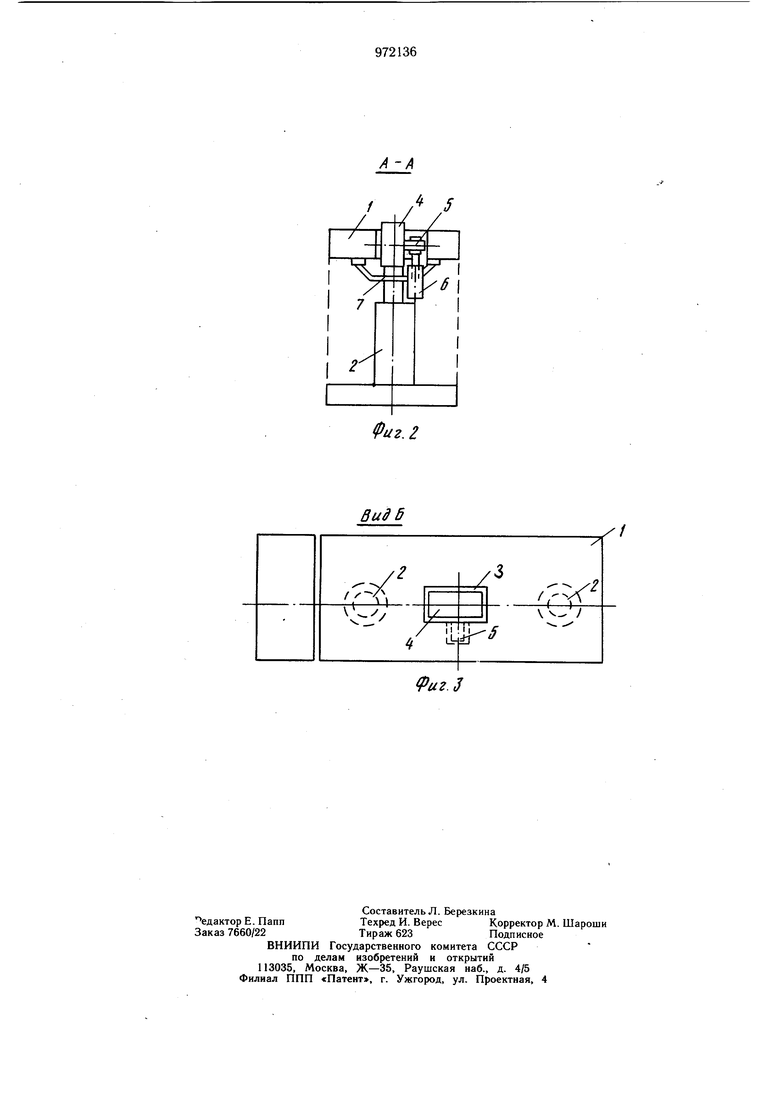
На фиг. 1 изображена секция механизированной крепи; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Секция механизированной крепи имеет перекрытие 1, расположенное на гидростойках 2 и имеющее сквозной паз 3. Для измерения пройденного расстояния служит дат10чик 4, расположенный на выдвижной оси 5, перемещаемый гидродомкратом 6, закрепленном на упоре 7 и соединенном посредством рукавов 8 с гидросистемой крепи, таким образом, чтобы щтоковая полость гидростойки 15 крепи была соединена с порщневой полостью домкрата выдвижки датчика 4, а поршневая полость гидростойки - со штокоВой домкрата.
Устройство работает следующим образом.
20
В момент очистной выемки, кфгда секция крепи воспринимает нагрузку от пород кровли, в поршневой полости гидростоек 2 создается противодавление, которым, благодаря схеме подключения, домкрат 6 с укрепленными на нем осью 5 с датчиком 4 выводит из зацепления с кровлей датчик 4. При этом датчик 4 плотно контактирует с упором 7 домкрата, что препятствует его вращению даже искусственным путем. При разгрузке секции, перед передвижкой, перекрытие 1 секции опускают, при этом давление гидросистемы поступает в штоковую полость гидростойки 2 и одновременно в поршневую полость домкрата 6, который раздвигаясь прижимает датчик 4 к кровле.
Для работы предлагаемого устройства датчик 4 жестко укрепляют на оси 5, которая в свою очередь соединена с домкратом 6 посредством подшипника, т.е. при выдвинутом штоке домкрата обеспечится свободное вращение оси 5 с установленным на ней датчиком 4. Кроме того, при выдвинутом щтоке домкрата будет обеспечен надежный контакт датчика с боковыми породами, а перемещение секции, при ее передвижке, вызовет вращение датчика 4. Число оборотов датчика, посредством механических или электрических связей, фиксируют на счетчике или самописце, которые могут быть любыми из существующих типов (механические, электрические и т.п.).
Для простоты в изготовлении датчик 4 может быть выполнен круглой формы, в виде колеса, причем внешнюю поверхность его покрывают слоем резины или снабжают насечками для Надежного сцепления с боковыми породами. Соединение датчика со счетчиком пройденного расстояния может осуществляться путем механических или электрических связей, однако это не является предметом изобретения. В качестве примера рассмотрим один из вариантов механического соединения датчика со счетчиком пройденного расстояния. Для этого на оси 5 жестко закрепляют зубчатую шестерню, которая, вращаясь вместе с датчиком, передает вращение на счетчик, который и фиксирует число оборотов датчика, причем, зная наружный диаметр датчика, счетчик можно оттарировать таким образом, чтобы на нем сразу фиксировалось расстояние, пройденное секцией.
Секция механизированной крепи может иметь паз 3 как в перекрытии, так и в основании секции в зависимости от того, в каких условиях работает механизированная крепь. При наличии прочных, труднообрушаемых пород кровли паз 3 располагается в перекрытии крепи, а в случае легкообрушаемых пород, при образовании вывалов из кровли - в основании секции крепи. По сравнению с известными секциями механизированной крепи преимущество предлагаемой заключается в автоматическом, оперативном контроле пройденного секцией расстояния, что исключает применение ручных маркшейдерских замеров для этой цели.
Формула изобретения
Секция механизированной крепи, включающая перекрытие, основание, домкраты и стойки с гидросистемой, отличающаяся тем, что, с целью обеспечения возможности автоматического контроля расстояния, пройденного секцией, последняя снабжена датчиком с самописцем, в перекрытии выполнен сквозной паз для их размещения, паз имеет выдвижную ось, на которой закреплен датчик, причем ось соединена посредством дополнительного домкрата с гидросистемой крепи.
Источники информации,
принятые во внимание при экспертизе
Фиг. г
В ид б
X/
иг.З
