(54) СПОСОЁ УПРАВЛЕНИЯ РАБОТОЙ СЕЯЛКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЯЛКА | 1993 |
|
RU2057422C1 |
| Промышленная сеялка | 2018 |
|
RU2679707C1 |
| ПНЕВМАТИЧЕСКАЯ СЕЯЛКА С ЦЕНТРАЛЬНО-ДОЗИРУЮЩЕЙ СИСТЕМОЙ | 2010 |
|
RU2448445C1 |
| СЕЯЛКА | 2005 |
|
RU2324320C2 |
| Сеялка | 1989 |
|
SU1746920A1 |
| Сеялка-культиватор точного высева | 2020 |
|
RU2745094C1 |
| Сеялка | 1986 |
|
SU1375160A1 |
| Способ контроля привода низкоскоростного вала катушечных высевающих аппаратов сеялки | 1986 |
|
SU1515408A1 |
| КАТУШЕЧНЫЙ ВЫСЕВАЮЩИЙ АППАРАТ ДЛЯ ВЫСЕВА МЕЛКОСЕМЯННЫХ КУЛЬТУР, В ТОМ ЧИСЛЕ АМАРАНТА | 2000 |
|
RU2202164C2 |
| Сеялка для раздельного гнездового посева кормовых трав | 1958 |
|
SU121609A1 |
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к способам управления работой сеялки.
Известны способы управления работой сеялки, основанные на установке катушек высеваюших аппаратов на норму высева путем механического перемещения их относительно корпуса 1.
Недостатком указанных способов является то, что установленная норма высева семян в „ процессе работы сеялки не является оптимальной в связи с тем, что при движении агрегата постоянно изменяется его скорость движения.
Наиболее близким по технической сущности к заявленному способу является способ j управления работой сеялки с катушечным высеваюшим аппаратом и пневматическими колесами, включающий регулирование положения сошников в зависимости от технологического параметра ее работы 2.20
Недостатком способа является то, что он не обеспечивает комплексной установки всех рабогих органов селяки, в чястиости соншикои. высевяюшич ппп;)раыв и вспдуха в
опорных колесах сеялки в оптимальное положение в зависимости от изменения скорости движения и тягового сопротивления сеялки.
Цель изобретения - улучшение регулирования глубины заделки семян.
Эта цель достигается тем, что согласно способу управления работой сеялки с катушечным высевающим аппаратом и пневматическими колесами, включающему регулирование ее работы, в качестве технологического параметра используют тяговое сопротивление сеялки, в за- висимости от величины которого дополнительно регулируют давление в шинах колес и рабочую длину катушки высевающего аппарата.
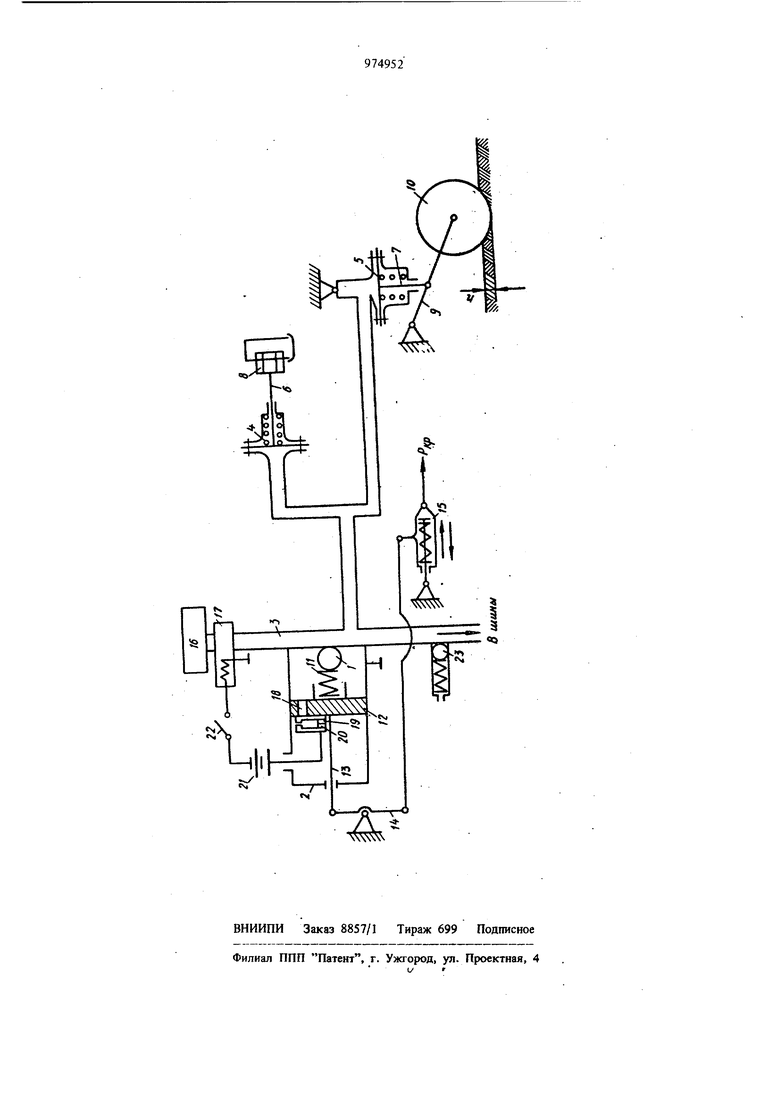
На чертеже изображено устройство, реализуюшее способ управления работой сеялки.
Устройство для реализации способа содержит управляющее устройство в виде шарика 1, который помешен б шигандре 2 и сообщен седлом с одной стороны через магистраль 3 с полостями шин опорных колес сеялки и исполнительными механизмами 4 и 5, выполненными в виде воздушных камер с эласгичным1 подпружиненными диафрагмами, которые штоками 6 и 7 соответственно, соединены с с катушкой 8 высевающего аппарата и поводками 9 сошников 10. С другой стороны шарик 1 подпружинен пружиной 1 относительно поршня 12, шток 13 которого посредством коромысла 14 и рычага соединен с подпружиненным прицепным , механизмом 15 сеялки. Магистраль 3 сообшена с компрессором 16 через электромагнитный клапан Г/. В поршне :12 выполнено сквозное отверстие 18, к которому примыкает подвижный контакт 19, соединяющийся в определенном положении с неподвижным контактом 20, который соедине| источником 2 тока и выключателем 22 с электромагнитным клапаном 17. Для ограничения максимально допустимого, давления воздуха в Ъганах опорных колес сеялки и в камерах исполнительных механизмов 4 и 5 рабочих органов в магистрали 3 установлен предохранительный клапан 23. Управление работой сеялки осушествляется следуюшим образом. При увеличении тягового сопротивления сеялк выше номинального, что соответствует увеличению скорости движения сеялки, поршен 12 посредством коромысла 14 перемешается влево, уменьшая величину сжатия пружины 11 Под действием давления воздуха в магистрали 3 шарик 1 отходит от седла, пропуская воздух в надпоршневую полость цилиндра 2, откуда он через отверстие 18 воздействует на подвижный контакт 19, который , перемещаясь соединяется с неподвижным контактом 20. За счет указанного ток от источника 21 тока проходит через электромапштный клапан 17, который перекрывает поступление воздуха от компрессора 16 в магистраль 3. При зтом часть воздуха из шин опорных колес и исполнительных механизмов 4 и 5 высеваюи1его аппарата и сошников через отверстие 18 выхо дит в атмосферу. Снижение величины давления воздуха в ши нах опорных колес приводит к увеличению площади контакта их с почвой и уменьшению из радиуса, что влечет за собой увеличение частоты их врашения и увеличение нормы высева семян,, за счет большей частоты вращени 8 высевающих аппаратов, нриводимы в действие опорных колес сеялки. Снижение дав;гения воздуха в камерах исполнительнг 1х механизмов 4 и 5 влечет за собой перемещение катушки 8 относительно кор 9 4 уса высевающего аппарата за счет подпружиненного штока 6 влево, в сторону уменьшения, нормы высева, и перемещение поводков 9 сошников 10 вверх за счет подпружиненного штока 7, уменьшая глубину хода сошников. При снижении тягового сопротивления сеялки до номинального, что соответствует снижению скорости сеялки, поршень 12 перемещается вправо. Под действием пружины 11 шарик 1 прижимается к своему седлу, выход воздуха из магистрали 3 прекращается. Контакты 19 и 20 размыкаются и выключается цепь электромагнитного клапана, который сообшает магистраль 3 с компрессором 16 подвода воздуха. Полости шин и исполнительных механизмов 4 и 5 заполняются воздухом до номинального значения давления. При этом давление воздуха воздействует на эластишые мембраны исполнительных механизмов 4 и 5, перемещая штоками 6 и 7, соответственно, катушки 8 в корпусе высевающих аппаратов в поводки 9 сошников 10, обеспечивая оптимальную норму высева семян, глубину хода сошников 10, величину площади контакта и радиус опорных колес сеялки. Таким образом, предложенный способ обеспечивает за счет единого управляющего устройства в зависимости от тягового сопротивления устанавливать оптимальную норму высева семян, глубину хода сошников и плошадь контакта опорных колес сеялки с почвой. Формула изобретения Способ управления работой сеялки с катушечным высевающим аппаратом и пневматическими колесами, включающий регулирование положения сощников в зависимости от технологического параметра ее работы, отличающийся тем, что, с целью улучшения регулирования глубины заделки семян, в качестве технологического параметра используют тяговое сопротивление сеялки, в зависимости от величины которого дополнительно регулируют давление в шинах колес и рабочую длину катушки высевающего аппарата. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ N 1949926, кл. 45 В 7/12, 1973. 2.Авторское свидетельство СССР № 345892, кл. А 01 С 7/20, 1971 (прототип).
