Изобретение относится к медицинской технике, а именно, к устройствам биоэлектрического управления движениями человека, и предназначено для использования в нормальных и специфических условиях, где необходимо управление движениями, их коррекция или обучение определенным двигательным навыкам, например при тренаже, профессиональном обучении, спорте и т.д., а также для использования в клинических условиях для анализа, диагностики и лечения ряда двигательных расстройств (параличей и парезов) при некоторых заболеваниях центрального и периферического отделов нервной системы.
По основному авт . св. N 929054 известно многоканальное устройство адаптивного биоэлектрического управления движениями, человека,каж.дый канал которого содержит цепь стимуляции, состоящую из отводящих (от донора) электродов, подключенных через усилитель биопотенциалов к интегратору, модулятора, один из входов которого подключен к генератору стимулирующего сигнала, выход - ко входу усилителя мощности и стимулирующих (реципиента) электродов, цепь
обратьюП связи, состоящую из последовательно соединенных усилителя биопотенциалов и интегратора, блока разделения, оцин из входов которого подключен к выходу усилителя мощности, выход - к стимулирующим электродам, вТорюй вход - к стимулирующим электрО рам, второй выход ко входу цепи обратной связи, блок
10 сравнения, один из входов которого через первый триггер Имидта подключен к выходу интегратора цепи обратной связи, второй вход через второй триггер и1мидта - к выходу
15 интегратора цепи стимуляции, выход к одному из входов блока формирования подпорогового уровня, ко второму входу которого подключен выход второго триггера Шмидта, выход бло20ка формирования подпорогового уровня подключен ко второму выходу модулятора fl.
Однако при работе с устройством
25 происходит искажение программа движений при управлении, вызванных изменением функционального состояния стимулируемых нервно-мышечных групп реципиента, и утомляемость
30 мышц реципиента.
Известно также многоканальное устройство адаптивного биоэлектрического управления движениями человека, в каждый канал которого с целью уменьшения искажений программы движений при управлении введен регулируемый делитель, один из входов которого подключен к выходу интегратора цепи стимуляции, второй вход - к выходу блока формирования подпорогового уровня, а выход к входу модулятора.
Однако формирование управляющего сигнала в известном устройстве происходит без учета утомляемости мышц при стимуляции. В то же время известно, что при длительной электрической стимуляции мышц наступает их утомление. В зависимости от того, с какой целью применяется электрическая стимуляция мышц, в каждо конкретном случае при наступлении утомления нужно либо вообще прекратить стимуляцию, либо продолжать стимулировать мышцы в щадящем режиме,т.е. понизить амплитуду стимулирующего сигнала, что не выпол.няется при управлении движениями с помощью известного устройства. Поскольку при длительной стимуляции порог возбуждения мышц реципиента растетJ амплитуда стимулирующего сигнала также возрастает. В результате rvщшцы реципиента стимулируются все возрастающим по a /lплитyдe сигналом, что приводит к еще большему их утомлению.
Цель изобретения - уменьшение утомляемости мышц реципиента при стимуляции. I
Поставленная цель достигается :Тем, что в каждый канал устройства введены дополнительная обратная связь, состоящая из частотомера, подключенного к выходу усилителя бипотенциалов мышц реципиента,первого дифференцирующего усилителя, вход которого подключен к выходу часто-, томера, второго дифференцирующего усилителя, вход которого подключен к выходу интегратора биопотенциалов мышц реципиента, блока умножения, первый и второй входы которого подключены к выходам соответствующих дифференцирующих усилителей, и электронного ключа, один вход которого подключен к выходу блока умножения, а другой - к выходу частотомера, и дополнительный регулируемый делитель, один вход которого подключен к выходу дополнительной цепи обратной связи, второй вход к выходу блока формирования порогового уровня, а выход - к третьему входу модулятора и второму входу регулируемого делителя цепи стимуляции .
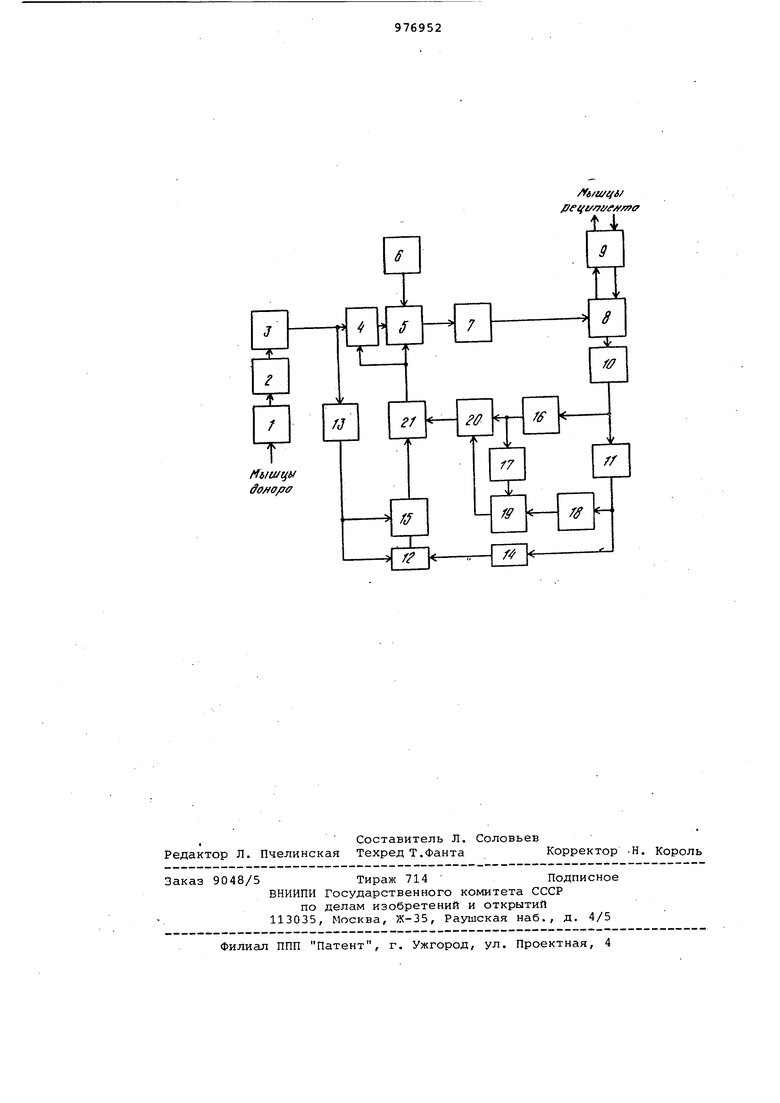
На 1ертеже изображена структурная схема многоканального устройства адаптивного биоэлектрического управления движениями человека.
Каждый канал устройства содержит электроды 1, подсоединенные к мышцам донора, усилитель 2 биопотенциалов мьшщ донора, интегратор 3, регулируемый делитель 4, модулятор 5, генератор 6 стимулирующего сигнала, o усилитель 7 мощности, блок 8 разделения управляющего сигнала и сигнала вызванной биоэлектрической активности мышц реципиента, электроды 9, подсоединенные к мышцам реципиента, усилитель 10 биопотенциалов мышц реципиента, интегратор 11, блок 12 сравнения, первый пороговый эле-. мент 13, второй пороговый элемент 14, блок 15 формирования порогово. to уровня, частотомер 16, первый дифференцирующий усилитель 17, второй дифференцирующий усилитель 18, блок 19 умножения, электронный ключ 20 и дополнительный регулируемый делитель 21.
Устройство работает следующим образом.
Биоэлектрическая активность мышц донора, возникающая при выполнении донором тех или иных движений, через электроды 1, подсоединенные
к мышцам донора, и усилитель 2 биопотенциалов поступает на интегратор 3. На выходе интегратора 3 формируется программный сигнал в
5 виде усредненной во времени биоэлектрической активности мышц донора, который через делитель 4 поступает на первый вход модулятора 5, на второй вход которого с выхода генератора б поступает стимулирующий сигнал. На выходе модулятора 5 формируется управляющий сигнал, который через усилитель 7 мощности и блок 8 разделения поступает на
5 электроды 9, подсоединенные к мышцам реципиента. Под влиянием управляющего сигнала мышцы реципиента возбуждаются и сокращаются. Вызванная биоэлектрическая активность дшшц реципиента через блок 8 разделения управляющего сигнала и сигнала вызванной биоэлектрической активности и усилитель 10 биопотенциалов мышц реципиента поступает на интегратор 11. На выходе интегратора 11 формируется усредненная во времени биоэлектрическая активность мышц реципиента, которая поступает на вход второго порогового
элемента 14.
0 с выхода интегратора 3 усредненная во времени биоэлектрическая активность мышц донора поступает на первый пороговый элемент 13, на выходе которого формируется прямоугольный импульс постоянной амплитуды, передний фронт которого совпадает с временем появления программного сигнала и длительность которого равна времени первого порогового элемента 13, и на первый вход блока 12 сравнения. На второй вход блока 12 сравнения с выхода второго порогового элемента 14 поступает прямоугольный импульс постоянной амплитуды, передний фронт которого совпадает с временем появления вызванной электродиаграммы мышц реципиента. На выходе блока 12 сравнения формируется импульс постоянной амплитуды, длительность которого равна времени запаздывания появления вызванной электромиограммы реципиента по отношению к появлению электромиограммы донора. Поскольку это время запаздывания пропорционально порогу возбуждения мышц реципиента, длительность импульса на выходе блока 12 сравнения пропорциональна порогу возбуждения мышц реципи.ента. С выхода блока 12 сравнения упомянутый импульс поступает на первый вход блока 15 формирования порогового уровня, на второй вход которого поступает импульс с выхода первого порогового элемента 13. На выходе блока 15 формирования порогового уровня формируется импульс, амплитуда которого пропорциональна порогу возбуждения мышц реципиента, а длительность которого совпадает с временем существования программного сигнала. С выхода усилителя 10 биопотенцисшов вызванная электромиограмма мыщц реципиента поступает на частотомер 16, на выходе которого появляется электрический сигнал, пропорциональный средней частоте вызванной электромиограммы мьпяц реципиента в данный момент времени. С выхода частотомера 16 этот сигнал поступает на первый дифференцирующий усилитель 17 и второй вход электронного ключа 20. На выходе первого дифференцирующего усилителя 17 появляется сигнал, пропорциональный скорости изменения частоты вызванной электромиограммы. Этот сигнал - положительный при возрастании частоты и отрицательный при уменьшении частоты. С выхода усилителя 17 сигнал ( положительной или отрицательной полярности) поступает на первый вход блока 19 умножения. С выхода интегратора 11 усредненная во времени вызванная электромиограмма поступает на второй дифференцирующий усилитель 18, на выходе которого формируется сигнал, пропорциональный скорости изменения амплитуды усредненной во времени вызванной электромиограммы реципиента. На второй вход блока 19
умножения с выхода второго дифференцирующего усилителя 18 поступает сигнал положительной или отрицательной полярности в зависимости от того, возрастает или уменьшается
амплитуда усредненной во времени вызванной электромиограммы реципиента в данный момент времени. На выходе блока 19 умножения появляется сигнал только в тот момент времени, когда на его входы поступают разнополярные сигналы.
Известно, что при возрастании усилия, развиваемого работающей мышцей, растут амплитуда и частота
5 интерференционной электромиограмл« и, наоборот, при уменьшении усилия амплитуда и частота уменьшаются. При утомлении работающей мышцы гз условиях стандартизации нагрузки
Q как для статической, так и для динамической работы, амплитуда усредненной во времени биоэлектрической активности увеличивается, а частота следования колебаний интерференцион- ной электромиограммы уменьшается, причем чем больше сила сокращения, тем значительнее уменьшение частоты. Поэтому в момент наступления утомления на первый вход блока 19 умножения с выхода первого дифференцирующего усилителя 17 поступает сигнал отрицательной полярности (поскольку частота электромиограмNfci в этот момент падает), а на второй вход блока 19 умножения с выхода второго дифференцирующего усилителя 18 поступает сигнал положительной полярности (амплитуда растет) . Поэтому при наступлении утомления мышц реципиента на выходе блока 19 умножения появляется сигнал в виде импульса постоянной амплитуды, длительность которого равна времени существования разнополярных импульсов на входах блока 19
5 умножения, который с выхода блока 19 умножения поступает на управляющий вход электронного ключа 20, на второй вход которого с выхода частотомера 16 поступает электрический сигнал, пропорциональный сред0ней частоте вызванной электромиограммы реципиента. На выходе нормально разомкнутого электронного ключа 20 появляется сигнал, пропорциональный средней частоте вызванной электро5миограммы реципиента, только в том случае, если присутствует сигнал на его управляющем входе, т.е. если наступает утомление кышц реципиента. Этот сигнал с выхода злектронного ключа 20 поступает на управляющий вход дополнительного регулируемого делителя 21, на второй вход которого с выхода блока 15 формирования порогового уровня
5 поступает сигнал, амплитуда которого
пропорциональна порогу возбуждения МЫ1ЛЦ реципиента. При отсутствии утомления мьшщ реципиента на управляющий вход дополнительного делител 21 сигнал не поступает. При этом коэффициент передачи дополнительного делителя 21 равен единице и на его выходе формируется сигнал, амплитуда которого пропорциональна порогу возбуждения мышц реципиента. Этот пороговый.уровень поступает на второй ( управляющийj вход делителя 4 и третий вход модулятора 5. Tfiкимобразом, при отсутствии утомления мышц реципиента на выходе модулятора 5 формируется такой же управляющий сигнал, как в известном устройстве, а именно, на выходе модулятора 5 формируется управляющий сигнал, по форме повторяющий стимулирующий сигнал, по амплитуде пропорциональный преобразованному в соответствии с пороговым уровнем мышц реципиента программному сигналу и суммированный с этим пороговым уровнем.
При утомлении мышц реципиента на управляющий вход дополнительного делителя 21 поступает сигнал, пропорциональный средней частоте вызванной электромиограммы реципиента, и коэффициент передачи дополнительног делителя 21 уменьшается тем значительнее, чем больше уменьшение частоты вызванной электромиограммы, т.е. чем сильнее утомление мышц реципиента. В соответствии с уменьшением коэффициента передачи дополнительного делителя 21 уменьшается амплитуда порогового уровня, поступающего на второй (управляющий) вха.4 делителя 4 на третий вход модулятора 5. Таким образом, на выходе модулятора 5 формируется управляющий сигнал, амплитуда которого уменьшается пропорционально утомлению мышц реципиента, а мышцы последнего стимулируются в щадящем режиме до тех пор, пока не прекратится утомление.
Таким o6pei3OMf в устройстве амплитуда управляющего сигнала изменяется не только в зависимости от порога возбуждения мышц реципиента, но-и с учетом утомления этих мьшц,
что позволяет уменьшить амплитуду управляющего сигнала в случае наступления утомления мышц реципиента и предотвратить их дальнейшее утомление.
Формула изобретения
Многоканальное устройство адаптивного биоэлектрического управления движeния да человека по авт. св. f 929054, отличающееся тем, что, с целью уменьшения утомляемости мышц реципиента при стимуляд ции, в каждый канал устройства введены дополнительная обратная связь, состоящая из частотомера, подключенного к выходу усилителя биопотенциалов мышц реципиента, первого дифференцирующего усилителя, вход которого подключен к выходу частотомера, второго дифференцирующего усилителя, вход которого подключен к выходу интегратора биопотенциалов мышц реципиента, блока умножения, первый
0 PJ второй входы которого подключены к выходам соответствующих дифференцирующих усилителей, и электронного ключа, один вход которого подключен к выходу блока умножения, а другой 5 к выходу частотомера, и дополнительный регулируемый делитель, один вход «которого подключен к зыходу дополнительной цепи обратной связи, второй вход - к выходу блока формирования порогового уровня, а выход к третьему входу модулятора и второму входу регулируемого делителя цепи стимуляции.
2 Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 929054, кл. А 61 В 5/04, 1976.
/ff/t i/ pei/t/ i/f / e7
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1976 |
|
SU929054A2 |
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1974 |
|
SU856436A1 |
| Многоканальное устройство био-элЕКТРичЕСКОгО упРАВлЕНия дВижЕНи-яМи чЕлОВЕКА | 1974 |
|
SU847993A1 |
| Способ формирования стимулирующего напряжения | 1976 |
|
SU608282A1 |
| Корректор движений | 1980 |
|
SU938929A1 |
| Многоканальный стимулятор | 1983 |
|
SU1181671A1 |
| Электростимулятор мышц | 1986 |
|
SU1391659A1 |
| Устройство для определения временных интервалов активного состояния мышц | 1990 |
|
SU1766370A1 |
| Тренажер для выработки координарно-моторного рефлекса | 1983 |
|
SU1168199A1 |
| Устройство для диагностики нервно-мышечных заболеваний | 1988 |
|
SU1711819A1 |