Изобретение относится к медицинекой технике и может быть использовано при формировании новых и коррекции уже сформированных двигательных навыков.
Известно устройство для коррекции движения, содержащее усилители биопотенциалов, последовательно соединенные с ними интеграторы, формирователь функции модуля разности, пороговое устройство и электростимулятор tl 3.
Недостатком известного устройства является низкая эффективность коррекции движений, обусловленная тем, что выработка корректирующих сигналов происходит на основе сравнения реального движения с постоянным эталоном движения, устанавливаемым до коррекции.
Цель изобретения - повышение эффективности коррекции движений путем адаптивного регулирования биэлектрической активности мышц.
. , ,
Указанная цель достигается тем, что в устройство, содержащее усилители биопотенциалов, последовательно соединенные с ними интеграторы, формирователь функции модуля разности, пороговое устройство и электростимулятор, введены два блока памяtoти, счетчик, блок усреднения, регулируемый делитель, причем вход счетчика и информацибнный вход первого блока памяти соединены с выходом формирователя функции модуля
15 разности, первый выход счетчика подключен к управляющему входу первого блока памяти, выход которого соединен с информационным входом блока усреднения, управляющий вход
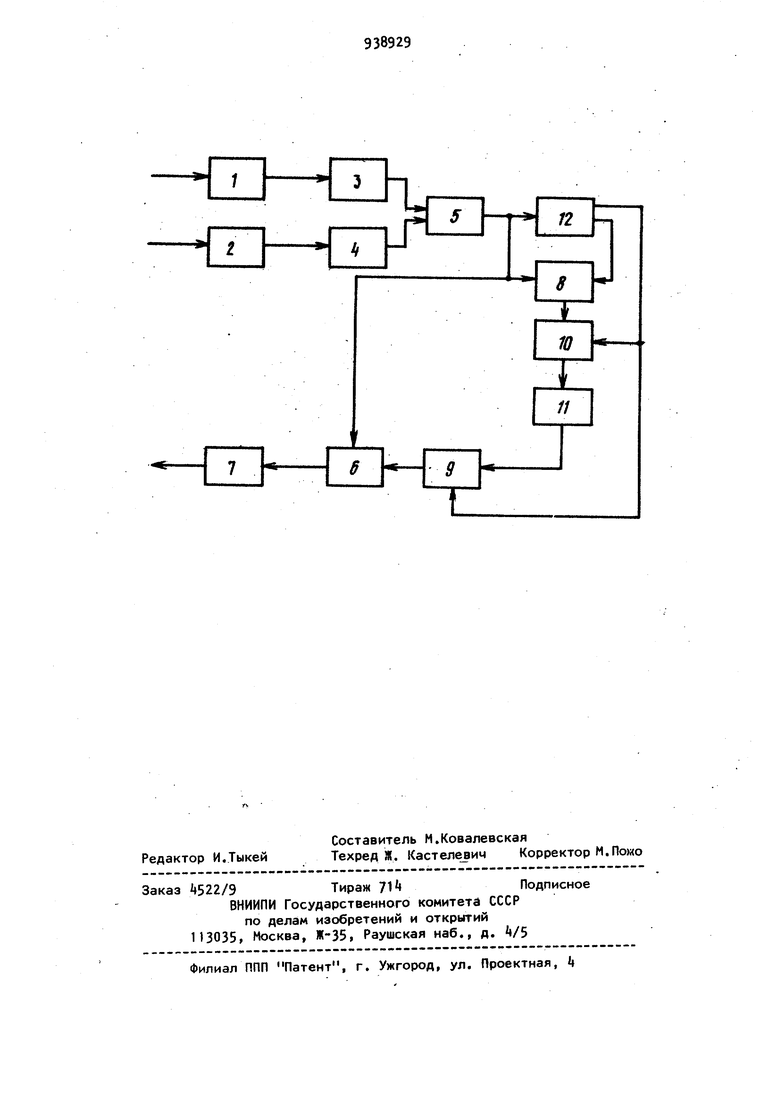
20 которого соединен с вторым выходом счетчика, первым входом регулируемого делителя и управляющим входом второго .блока памяти, выход которо-. 3 го подключен к второму входу порогового устройства, а информационный вход второго блока памяти соединен с выходом регулируемого делителя, второй вход которого подключен к вы ходу блока усреднения. На чертеже изображена блок-схема предлагаемого корректора движений. Корректор движений содержит усилители биопотенциалов 1 и 2, последовательно соединенные с ними интеграторы 3 и , подключенный к ним формирователь 5 функции модуля разности, пороговое устройство 6, электростимулятор 7, первый 8 и вто рой 9 блоки памяти, блок 10 усреднения, регулируемый делитель 11, счетчик 12, Вход с.четчик-а 12 и информационный вход первого блока В памяти соединены с выходом формирователя 5 функции модуля разности, а первый выход счетчика 12 подключен к управляющему входу первого блока 8 памяти. Выход первого блока 8 памяти соединен с информационным входом блока 10 усреднения, управля щий вход которого соединен с вторым выходом счетчика 12, первым входом регулируемого делителя 11 и управляющим входом второго блока 9 памяти. Выход второго блока 9 паЛяти подключен к второму входу пороговог устройства 6, а его информационный вход соединен с выходом регулируемо го делителя 11, второй вход которог подключен к выходу блока 10 усредне ния. Устройство работает следующим об разом. Биопотенциалы корректируемых мышц усиливаются усилителями 1 и 2 биопотенциалов, затеи поступают на интеграторы 3 и , с выходов которы проинтегрированные сигналы поступаю на входы формирователя 5 функции мо дуля разности, на выходе которого формируется сигнал, пропорциональный разности амплитуд вхрдных сигналов. Сигнал с выхода формирователя 5 фун ции модуля разности поступает на вход блока памяти и записывается в него по сигналам управления, снимае мым с первого выхода счетчика 12, который изменяет свое состояние с приходом каждого сигнала с выхода формирователя 5 функции модуля разности. Таким образом, в блоке 8 памяти оказываются записанными все текущие значения сигналов функции мо9дуля разности, причем число записанных значений определено счетчиком 12. По сигналам, снимаемым с второго выхода счетчика 12, в блоке 10 усреднения определяют среднее значение накопленных текущих значений сигналов формирователя 5 функции модуля разности в соответствии со следующей формулой X - . где а - текущий порядковый индекс; N - число записанных значений; х. текущее значение функции модуля разности; среднее значение по N. Полученная в блоке 10 усреднения величина поступает на информационный вход управляемого делителя 11, где производится ее деление на индивидуальный коэффициент, выбираемый экспериментально для данного объекта регулирования. Полученная, таким образом, величина поступает на второй блок 9 памяти и записывается в него по сигналам, снимаемым с второго выхода счетчика 12. В результате выполненных действий в блоке 9 памяти оказывается записанным среднее значение по N, которое поступает на второй вход порогового устройства 6 в течение следующих N импульсов и является пороговым значением для сигналов, снимаемых с выхода формирователя 5 функции модуля разности. Если эти сигналы не превышают заданного порога, на выходе порогового устройства 6 формируется импульс, который осуществляет запуск электростимулятора 7 вырабатывающего импульсы электрокожной стимуляций, подаваемые на объект регулирования. Эти импульсы создают отрицательные ощущения, по которым объект определяет неправильность выполняемого движения и осуществляет направленную адаптивную регуляцию выполненного движения. В исходном состоянии устройства для обеспечения оптимальных условий коррекции движений путем адаптивного регулирования биоэлектрической активности мышц устанавливают индивидуальное значение порога срабатывания электростимулятора, равное 0,6-0,9 от максимально возможного, вычисленнсго в результате предварительного выполнения человеком движения. При выполнении последующих движений, .значения функции модуля разности могут изменяться в зависимости от совершенствования выполняемого движения, совершенствования центральной программы выполняемого движения, утомления объекта регуляции и от многих других причин. Для непрерывного учета факторов, оказывающих влияние на изменение объекта регуляции и сохранения постоянного оптимального уровня подкрепления корректируемого движения, пороговое значение срабатывания элект ростимулятора непрерывно автоматически изменяется через каждые N последовательно выполненных движения (переменный эталон), тем самым обеспечивая поддержание постоянного оптимального уровня подкрепления корректируемого движения, что повышает эффективность коррекции движений при использовании метода адаптивного регулирования биоэлектричес кой активности мышц. Таким образом, предлагаемое устройство позволяет повысить эффек тивность коррекции движений путем адаптивного регулирования биоэлектрической активности мышц. Формула изобретения Корректор движений, содержащий усилители биопотенциалов, последова тельно соединенные с ними интеграто 96 ры, формирователь функции модуля разности, пороговое устройство и электростимулятор, отличающийс я тем, что, с целью повышения эффективности коррекции движений путем адаптивного регулирования биоэлектрической активности мышц, в него введены два блока памяти, счетчик, блок усреднения, регулируемый делитель, причем вход счетчика и информационный первого блока памяти соединены с выходом формирователя функции модуля разности, первый выход счетчика прдключен к управляющему входу первого блока памяти, выход которого соединен с информационньм входом блока усреднения, управляющий вход которого соединен с вторым выходом счетчика, первым входом регулируемого делителя и управляющим входом второго блока памяти, выход которого подключен к второму входу порового устройства, а информационный вход второго блока памяти соединен с выходом регулируемого делителя, второй вход которого подключен к выходу блока усреднения. Источники информации, принятые во внимание при экспертизе 1v Яковлев Н.М., Сметанкин А,А. Направленная регуляция биоэлектрической активности мышц в ходьбе у больных церебральным спастическим параличом. - Ортопедия, травматология и протезирование, 1976, Н 10, с. 72-75.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для диагностики нервно-мышечных заболеваний | 1988 |
|
SU1711819A1 |
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1977 |
|
SU976952A2 |
| Устройство для тренировки и обучения ритмоатлетическим упражнениям | 1986 |
|
SU1347950A1 |
| Устройство для тренировки мышц нижних конечностей человека | 1988 |
|
SU1711822A1 |
| Способ миоэлектрического управления отображением информации и устройство для его реализации | 1988 |
|
SU1575206A1 |
| Многоканальное устройство адаптивного биоэлектрического управления движениями человека | 1976 |
|
SU929054A2 |
| Адаптивный классификатор | 1984 |
|
SU1220004A1 |
| Устройство для определения временных интервалов активного состояния мышц | 1990 |
|
SU1766370A1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1833966A1 |
| Устройство для исследования органа слуха | 1981 |
|
SU995740A1 |
LlL
