1
Изобретение относится к электротехнике и может быть использовано в качестве высокоточного исполнитель|1ого устройства в системах автоматического регулирования, например, температурных режимов электротехнического оборудования.
I Известен регулятор электрической мощности -переменного тока, содержащий силовую цепь из последовательно соединенных тиристорных ключей и нагрузки, и управляющее устройствгэ, включающее датчик -регулируемой величины, усредняющий фильтр, компаратор и формиpoaaTeJib синхронизирующих импульсов, развертывающего опорного сигнала и запускающих импульсов Т.
.Недостатком таких регуляторов является значительная инерционность, обусловленная наличием усредняющего фильтра и, как следствие, невысокая . статическая и динамическая точность .
Наиболее близким техническим решением к изобретению является регулгугрр мощности переменного тока, содержащий блок тиристоров, включенный в силовую цепь между входной и выходной клеммами, измерительный преобразователь мгновенной мощности, один вход которого подключен к выходу Датчика тока, а другой - к выходу датчика напряжения, включенных в силовую цепь, пос10ледовательно соединенные первый интегратор и вычитатель, к другому входу которого подключен задатчик, формирователь синхронизирующих импульсов, входом соединенный с входными клемма15ми, а выходом через формирователь синхронизирующего опорного сигнала подключенный к одному из входов компаратора, выход которого через формирователь запускающих импульсов подключен
20 к управляющему входу блока тиристоров С 2 .
В таком регуляторе точность под деружания заданного значения зависит от
точностных показателей усредняющего фильтра (интегрирующей цепи), причем точность увеличивается с увеличением постоянной времени фильтра. Однако, увеличение статической точности сеязано с ухудшением динамической точносТи регулятора, так как сигнал- обратной связи .с увеличением постоянной фильтра не может передавать быстрые изменения мощности. Кроме того, при скачкообразном изменении задания регулирования в регуляторе наблюдаются переходные процессы, длительность которых и величина пе зерегулирования также определяются постоянной времени фильтра.
Целью изобретения является увеличение точности и улучшение качества регулирования мощности.
Поставленная цель достигается тем, что в регулятор электрической мощности переменного тока введены второй интегратор, два аналоговых ключа и блок управления, причем первый аналоговый ключ включен между выходом измерительного преобразователя мгновенной мощности и входом первого интегратора, второй аналоговый ключ подключен к входу второго интегратора и выходу вычитателя, а выход второго интегратора соединен с вторым входом компаратора, причем вход блока управления подключен к выходу формирователя синхронизирующих импульсов, а выходы к управляющим входам ключей и первого интегратора.
. По второму варианту в устройство дополнительно введены последовательйо соединенные аналоговый ключ, второй интегратор и сумматор, выход которого подключен к второму входу компаратора, второй вход сумматора соединен с выходом задатчика, а вход аналогового ключа подключен к выходу вычитателя, и блок управления, входы которого соединены с выходо1у1 формирователя синхронизирующих импульсов и выходом компаратора, а первый; второй и третий выходы подключены соответственно к управляющему входу первого интегратора, к управляющему входу ана логового ключа и к стробирующему входу задатчика.
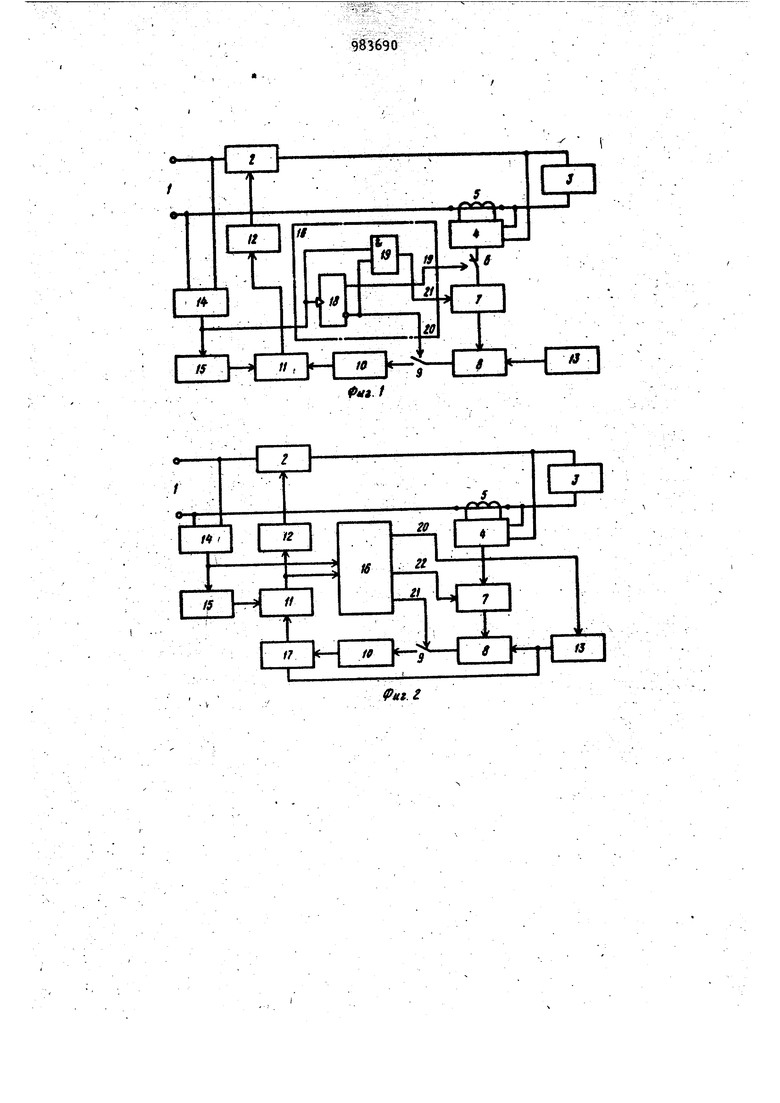
На фиг. 1 представлена функциональная схема регулятора мощности по первому варианту; на фиг. 2 - то же, по второму варианту; на фнг. 3 - временные диагр|Ьммы работы регулятора по
первому варианту; на фиг. Ц - то же, по второму варианту.
Функциональная схема регулятора по первому варианту (фиг. 1) -содержит входные клеммы 1 и подключенную к ней силовую цепь, состоящую из последовательно соединенных блока силовых тиристоров 2 и нагрузки 3 подключенной к выходным клеммам, устройство управления силовыми тиристорами, включающее последовательно соединенные измерительный преобразователь Ц мгновенной мощности, токовая измерительная цепь которого посредством датчика тока на измерительном трансформаторе 5 тока подключена к силовой цепи, а измерительная цепь напряжения подключена к выходу датчика напряжения, подключенного параллельно нагрузке, первый аналоговый ключ 6, интегратор 7, вычитатель 8, второй аналоговый ключ 9, второй интегратор 10, компаратор 11, формирователь 12 запускающих импульсов , выход которого подключен к управляющему входу блока силовых тиристоров 2, задатчик 13, выход которого соединен с вторым входом вычитателя 8, последовательно соединенные формирователь I синхронизирующих импульсов и формирователь 15 синхронизирующего опорного сигнала, выход которого подключен к второму входу компаратора 11, а вход формирователя I синхронизирующих импульсов соединен с входными клеммами 1, блок 1б управления, вход которого подключен К выходу формирователя И синхронизирующих импульсов,а выходы первый, второй и третий соответственно подключены к управляющему входу первого ключа 6, к управляющему .входу второго ключа 9. к управляющему входу первого интегратора 7.
Устройство управления силовыми тирис орами регулятора мощности по второму варианту (фиг. 2) содержит последовательно соединенные измерительный преобразователь Ц мгновенной мощности, первый интегратор 7, вычитатель 8 аналоговый ключ 9, сумматор 17, компаратор 11 и формирователь 12 запускающих импульсов, выход которого подключен к управляющему входу блока силовых тиристоров 2, последовательно соединённые формирователь It синхронизирующих импульсов и формирователь 15 опорного сигнала, выход которого соединен q вторым входом компаратора 59 11, задатчик 13. выход которого соединен с вторыми входами вычитателя 8 и сумматора 17, и блок 16 управления, входы которого подключены к выходу формирователя синхроимпульсов и к выходу компаратора, а первый, второй и третий выходы соединены соответственно с управляющим входом первого интег ратора 7. с управляющим входом аналогового ключа 9, со стробирующим входом задатчика 13Блок управления ключами для первого регулятора (фиг. 1) содержит счетный триггер 18 и двухвходовой логичес кий элемент И 19, входы которого подключены один к счетному входу триггера, а второй - к инверсному выходу триггера. Блоком силовых тиристоров может служить симметричный силовой тиристор или два встречно-параллельно включенных тиристора. В качестве измерительного преобразователя мгновенной мощности используется измерительный преобразователь мощности на датчике Холла, например ИПМ типа nOZt, определенным образом доработанный для увеличения точности Интеграторы 7 и 10, вычитатель 8 и компаратор 11 выполнены на основе операционных усилителей. Интегрирующая емкость интеграторов может закорачиваться ключом для возврата ратора в исходное состояние. Формирователь 15 синхронизирующего опорного сигнала выполняет функцию генератора спадающего пилообразного напряжения, синхронизированного сетью Формирователь 12 запускающих импульсов выполнен как транзисторный импуль сный усилитель с трансформаторным выходом; Аналоговыми, ключами могут служить МОП-ключи серий 1КТ682 и другие. Стробирующее устройство задатчика во втором варианте регулятора при произвольном изменении аналогового сигна .ла задания выполнено на основе устрой ства хранения-выборки аналоговых сигналов. Если же задатчик выполнен таким образом, что изменение сигнала задания происходит в определенные моменты, то приведённое, стробирующее устройство может отсутствовать, однако моменты изменения сигнала задания должны стробироваться импульсом с выхода 20 блока управления. Принцип работы регулятора мощности основан на фазовом методе управления 0 силовыми тиристорами с естественным ,выключением их. Момент включения тиристоров в полупериоде питающей сети определяет:ся соотношением опорного развертывающего сигнала и интеграла от ошибки между заданным значением и сигналом обратной связи, усредненным за полупериод питающей сети, в первом варианте регулятора, и соотношением опорного сигнала и сигналов задания и интеграла от ошибки между заданным значением и сигналом обратной связи, усредненным за полупериод питающей сети во втором варианте регулятора. Для первого регулятора в момент пенапряжения IL питающей сети череходарез нуль формирователь 1 синхроимпульсов формирует импульс, который запускает формирователь опорного сигнала и переключает счетный триггер 18 в блоке 16 управления ключами. Допустим, tpиггep 18 установился в нулевое состояние, при этом ключ 6 разомкнут, а ключ 9 замкнут. Интегратор 10 интегрирует сигнал ошибки, снимаемый с выхода вычитателя 8 и представляющий собой разность величины задания U и проинтегрированного значения мгновенной мощности U-J, переданной в на|- рузку в предыдущем полупериоде. 8 момент равенства сигнала интегратора 10 и опорного сигнала 1) , снимаемого с формирователя 15, компаратор фор-. мирует импульс, который запускает блок силовых тиристоров 2, обеспечивая подачу импульса мощности в нагрузку. Выключаются силовые тиристоры в момент спада тока нагрузки до нулевого значения. Следующий синхроимпульс переключает триггер 18, запускает формирователь 15 опорного сигнала и обнуляет интегратор 7. После переключения триггера 18 ключ 6 замыкается, а ключ 9 размыкается. Сигнал, записанный в интеграторе 10, запоминается, а ратор 7 готов к интегрированию сигна- . ла мгновенной мощности, снимаемого с измерительного преобразователя мгновенной мощности. В момент равенства опорного сигнала Ц и сигнала с интегратора 10 U-p компаратор 11 снова выдает сигнал на запуск блока силовых тиристоров 2, формируя новый импульс мощности. Мгновенные значения импульса мощности измеряются и складыва)отся в интеграторе 7-Последующим синхроимпульсом блок 1б управления переключается, ключ 6 размыкается, а ключ 9 замыкается. При этом сигнал в интеграторе 7 запоминается для формирования ошибки, а интегратор 10 интегрирует ее, формируя новый регулирующий сигнал. Временные диаграммы работы со ставных элементов этого регулятора приведены на фиг. 3Для второго регулятора синхроимпульс и,, запускает формирователь 15 опорного развертывающего сигнала и формирователь импульсов стабильной длительности в блоке 16 управления. Во время существования импульса стабильной длительности на выходе 21 ключ 9 замкнут, интегратор 10 интегрирует сигнал разности с выхода вычитателя 8, представляющего собой разность сигналов задания и обратной свя зи, полученного усреднением за полупериод сигнала, пропорционального мгновенной мощности, переданной в нагрузку в предшествующем полупериоде питающей сети. По окончании импульса на выходе 21 ключ 9 размыкается, интегратор 10 превращается в ячейку памяти, в которой содержится корректирующий сигнал сумматором 17, представляющий собой сумму сигнала задания и корректирующего сигнала U,Q . Oднoвpeмeннo по окончании импульса узел задержки в блоке 16 управления формирует импульс на выходе 22 на обнуление интегратора 7. В момент равенства опорного развер тывающего и регулирующего сигналов компаратор 11 формирует сигнал, который запускает блок силовых тиристоров 2. Мощность, поступающая в нагрузку, измеряется датчиком k и усредняется, в интеграторе 7 формируя при этом сигнал обратной связи. С приходом нового синхроимпульса цикл работы регулятора повторяется. Временные диаграм мы работы регулятора приведены на фиг. . Стробируйщий, импульс на выходе 20 блока 16 управления формируется7 начиная с момента появления синхроимпульса и заканчивается в момент срабатывания компаратора 11. В этот период задатчик 13 может изменить задающий сигнал, т. е. схема стробирования повторяет изменение задающего сиг Таким образом, для первого регулятора цикл работы, равный периоду пита ющей сети, состоит из двух подциклов: измерительного и формирования регулирующего сигнала, равных полупериодам питающей сети. В измерительном подцикле (ключ 6 замкнут, ключ 9 разомкнут) проводится измерение мгновенных значений импульса мощности, поступающих в нагрузку, и формирование сигнала о среднем значении мощности импульса за полупериод, т.. е. реализуется зависимость г u --Pcp t)-%J iC-t)uit)at, где Те - период питающей сети; i(t), U(t) - мгновенные значения тока и напряжения. В подцикле формирования регулирующего сигнала (ключ 6 разомкнут, ключ 9 замкнут) разность среднего значения импульса мощности Pcp(t) и заданной величины мощности 1), интегрируется в течение Тс/2 интегратором 10, формируя регулирующий сигнал, т. е. обеспечивается реализация функциональной зависимости Тс . Так как в |5егуляторе мощности си|- нал обратной связи формируется в течение одного полупериода питающей сети, а второй полупериод используется для формирования регулирующего сигнала, инерционность регулятора можно считать равной одному периоду питающей сети, в отличие от известного устройства, имеющего инерционность vi-периодов питающей сети, что позволяет в предла гаемом регуляторе в и раз уменьшить длительность переходных процессов, возникающих при изменении задающих или возмущающих воздействий. Кроме того, раздельное дискретное формирование.сигналов регулирования и обратной связи позволяет исключить перерегулирование в предлагаемом регуляторе, неизбежно возникающее при изменении задания регулирования в известном устройстве. Действительно, при скачкообразном изменении сигнала задания сигнал обратной связи из-за своей инерционности не в состоянии мгновенно изменить свое значение, а это приводит к возникновению ошибки регулирования, которая в свою очередь вызывает такое увеличение мощности, чтобы за минимально возможное время компенсировать возникшую ошибку. В регуляторе 9 вследствие того, что обратная связь фактически замыкается лишь в определенные моменты времени, интегратор 10 который в подцикле формирования регулирующего сигнала, имея коэффициент передачи равный единице, изменяет свое состояние на величину ошибки, обеспечивая в измерительном полупериоде регулирующий сигнал, при котором среднее значение мощности за полупериод соответствует заданному. Таким образом, при любых возмущениях по заданию регулятор обеспечивает переход к новому значению регулирования за . один период питающей сети без перерегулирования. Во втором варианте регулятора сигнал обратной связи и регулирующий сиг нал формируются в течение одного полу периода питающей сети, т. е. инерцион ность регулятора равна полупериоду пи тающей сети. При изменении задающего сигнала, которое может происходить в моменты существования стробирующего импульса (во время отсутствия стробирующего импульса изменения задающего сигнала не передаются на выход задатчика и задание регулирования в- этот момент равно заданию в момент окончания стробирующего импульса), регулятор формирует , импульс мощности по заданию, существующий в момент срабатывания компаратора (или в момент.окончания стробирующего. импульса) , По окончании импульса мощности, когда в первом интеграторе сформирован сигнал обратной связи, происходит сравнение сигнала задания и сигнала обратной связи, и по разности этих сигналов формируется вторым интегратором корректирующий сигнал, который учитывает возможные несоответствия между задающим сигналом и фактической мощностью, переданной в нагрузку импульсом. При коэффициенте передачи корректирующего интег ратора равном единице, это несоответствие отработано при формировании оче редного импульса мощности. Так как изменение задания регулирования не влияет на корректирующий сигнал, то при номинальных параметрах питающей сети и нагрузки переходной процесс практически отсутствует, т. е. выходная мощность регулятора соответствует заданной в каждом попупериоде питающей сети. 90 Регулятор может работать и без стробирования задатчика. Однако ввиду того, что возмущение по заданию может произойти в любой момент времени, например в тот момент, когда уже мощность поступает в нагрузку, изменение задания оказывает влияние на корректирующ|ий интегратор и в регуляторе в этом случае наблюдается перерегулирование и Затягивание переходного процесса, значения величин которого определяются коэффиц| ентом передачи корректирующего интегратора К. При переходной процесс заканчивается за два полупериода питающей сети, а величина перерегулирования равна возникшему рассогласованию. При уменьшении коэффициента передами величина перерегулирования падает, а длительность переходного процесса возрастает. Уменьшить величину пёререгулирования и длительность переходного процесса можно ограничением выходного сигнала корректирующего интегратора. Для этого емкость второго интегратора необходимо зашунтировать двумя стабилитронами, включенными встречно-параллельно или последовательно. Уровень ограничения определяется возможным значением отклонений мощности от номинальной при изменении параметров питающей сети и нагрузки. При отработке возмущений по мощности оба регулятора формируют корректирующий сигнал по величине возникшей ошибки, которая отрабатывается в последующем полупериоде. Следовательно. величина возможных отклонений регулируемой мощности от заданной зависиттолько от величины возникших возмущений. Использование предлагаемых регуляторов электрической мощности, имеющих высокую статическую точность регулирований и быстродействие близкое к оптимальному, позволяет строить на их основе быстродействующие прецизионные системы автоматического- регулирования, например, температуры электротермического оборудования. Формула изобретения 1. Регулятор электрической мощности переменного тока, содержащий блок тиристоров, включенный в силовую цепь между входной и выходной клеммами, измерительный преобразователь мгновенном мощности, один вход которого подключен к выходу датчика тока, а другой - к выходу датчика напряжения, включенных в силовую цепь, последовательно соединенные первый интегратор и вычитатель, к другому входу которого подключен задатчик, формирователь синхронизирующих импульсов, входом соединенный с входными клеммами, а выходом через формирователь синхронизирующего опорного сигнала подключенный к одному из входов компаратора, выход которого через формирователь запускающих импульсов подключен к управляющему входу блока тиристоров, отличающимися тем, что, с целью увеличения точности и улучшения качества регулирования, в него введены второй интегратор, два аналоговых ключа и блок управления, причем первый аналоговый ключ включен между выходом измерительного пр еобразователя мгновенной мощности и входом первого интегратора, второй аналоговый ключ подключен к входу второго ратора и выходу вычитателя, а выход второго интегратора соединен с вторым входом компаратора, вход блока управления подключен к выходу формирователя синхронизирующих импульсов, а первый, второй и третий выходы блока управления соединены соответственно с управляющим входом первого аналогового ключа, с управляющим входом второго аналогового ключа, и с управляющим входом первого интегратора.
2. Регулятор электрической мощности переменного тока, содержащий блок тиристоров, включенный в силовую цепь между входной и выходной клеммами, измерительный преобразователь мгновенНОИ мощности, один вход которого подключен к выходу датчика тока, а друго.й - к выходу датчика напряжения, включенных в силовую цепь, последовательно соединенные первый интегратор и вычитатель, к другому входу которого подключен задатчик, формирователь синхронизирующих импульсов, входом соединенный с входными клеммами, а выходом через формирователь синхронизирующего опорного сигнала подключенный к одному из входов компаратора, выход которого через формироват.ель запускающих импульсов подключен к управляющему входу блока тиристоров, отличающийся тем, что, с целью увеличения точности и улучшения качества регулирования, в него введены последовательно соединенные аналоговый ключ, второй интегратор и сумматор, а также блок управления, причем второй вход сумматора соединен с выходом задатчика, а выход подключен к второму входу компаратора, вход аналогового ключа подключен к выходу вычитателя, входы блока управления соединены с выходом формирователя синхронизирующих импульсов и выходом компаратора соответственно, а первый, втрой и третий ВЫХОДЫподключены соответственно к управляющему входу первого интегратора, к управляющему входу аналогового ключа и к стробирующему входу задатчика.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР If ,.кл. G 05 F 1/166, 1978.
2.Патент ФРГ № (1, кл. G 05 F 1/66, 1976.
I
Г-
гл-j
miJ
г
г
r -t-QIl


| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой тиристорный регулятор | 1981 |
|
SU954992A1 |
| Регулятор электрической мощности | 1980 |
|
SU943685A1 |
| Регулятор мощности переменного тока | 1980 |
|
SU877508A1 |
| Регулятор электрической мощности переменного тока | 1982 |
|
SU1056170A1 |
| Регулятор мощности переменного тока | 1983 |
|
SU1243069A1 |
| Устройство для формирования управляющего сигнала | 1980 |
|
SU903843A2 |
| Регулятор энергетического цикла сварки | 1987 |
|
SU1512736A1 |
| Фазовый регулятор машины контактной сварки | 1988 |
|
SU1563922A1 |
| Устройство регулирования электрической мощности переменного тока | 1991 |
|
SU1830523A1 |
| Регулятор мощности | 1986 |
|
SU1411109A1 |