(54) СПОСОБ РЕГУЛИРОВАНИЯ НАГРУЗКИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ НА ИСПЫТАТЕЛЬНОМ СТЕНДЕ
Изобретение относится к автоматизированным способам испытания ДВС на неустано- ; вив шихся режимах.
Известны способы регулирования нагрузки две на испьггательном стенде путем соединения вала двигателя с электрогенератором, а обмотки генератора с неизменным активным сопротивлением, измерения напряжения на зажимах активного сопротивления, измерения частоты вращения вала двигателя, формирования и подачи сигнала отрицательной обратной связи в обмотку электрогенератора 1. .
В качестве электрогенератора при этом используется генератор постоянного тока (ЭПТ) общепромьпыленного исполнения и в контур регулирования оказьгааются включенными маховые массы вращающихся узлов ЭПТ в совокупности с элементами цепи связи ее якоря с коленчатым валом испытуемого двнгателя. Вследствие этого удовлетворительное быстродействие при высоком качестве регулирования Может быть достигнуто лишь при
якорном регулирующем воздействии (цепь якоря практически безынерционна), например с использованием цщротно-импульсной модуляции. Улучшение указанного показателя в 5 этом случае связано с недопустимьтм з еличением колебательности регулирования, т.е. со снижением его качества. Кроме того, осуществление якорного регутшрующего воздействия нельзя признать рациональным, так
10 как уже при средних мощностях испытуемых двигателей токи якорей соответствующих ЭПТ измеряются сотнями и тысячами ампер, что усложняет регулирутоще-преобразующее оборудование. При полюсном же регулирую,5 щем воздействии (током возбуждения) и цри отсутствии специальных мер быстродействие системь, как правило, соверщенно недостаточно для реализации неустановившихся режимов работы транспортных и некоторых
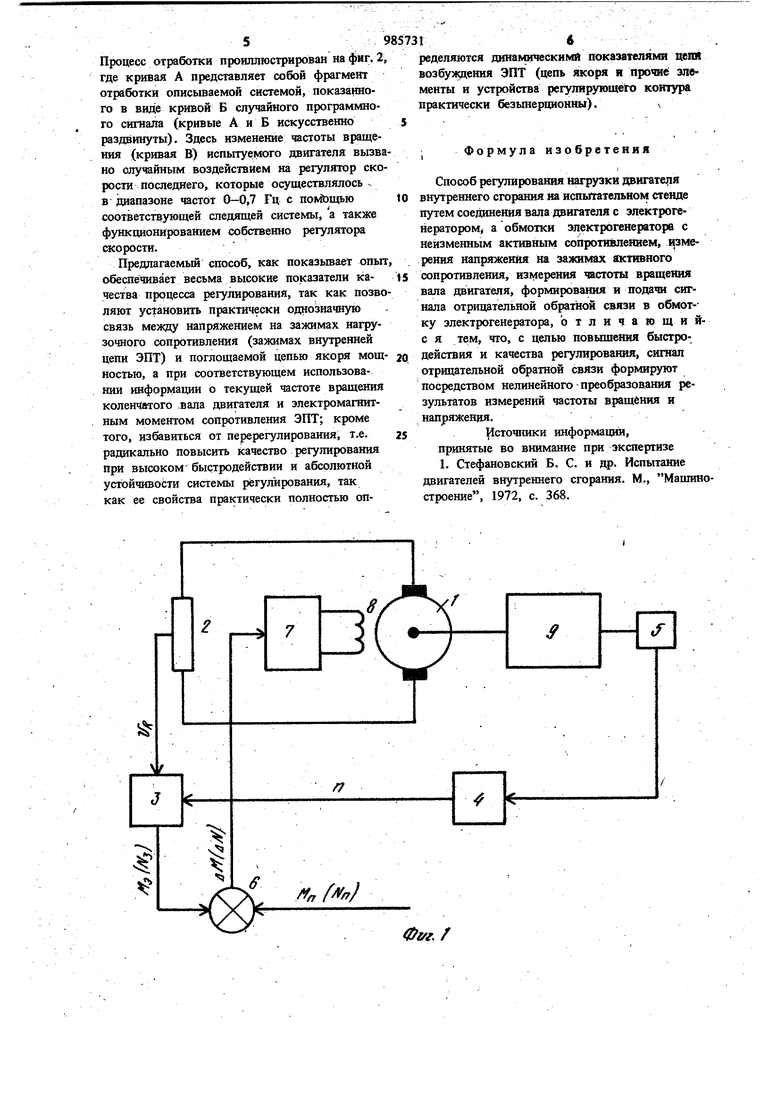
20 других двигателей, поскольку ;ш)гнтовые или независимьге обмотки возбучодения ЭПТ общепромышленного исполнения вьшолняются значительным числом витков проводника относительно малого сечения (слаботочных). 39 т.е. быстродействие известного способа и качество регулирования нагрузки недостаточны. . Цель изобретения - повьпиение быстродействия и качества регулирования нагрузки ДВС Для достижения указанной цели в способе регулирования нагрузки двигателя внутреннего сгорания на испытательном стенде путем соединения вала даигателя с электрогенератором, а обмотки генератора - с неизмегалш активным сопротивлением, измерения иапряжения на зажимах активного сопротивления, измерения частоты вращения вала двигателя, фор мирования и нодачи сигнала отрицательной обратной связи в обмотку электрогенератора, сигнал отрицательной обратной связи формируют посредством нелинейного преобразования результатов измерения частоты вращения и напряжения. На фиг. 1 приведена схема системы, реализующей предлагаемый способ регулирования нагрузки дизеля на испытательном стенде; на фиг. 2 - фрагмент процесса обработки реальной системы регулирования случайного программного сигнала. В системе (фиг. 1), реализующей предлагае мый способ, контур регулирования состоит из следующих элементов и устройств; ЭПТ 1 общепромьпяленного исполнения (регулируемы объект), активного сопротивления 2 нагрузки; специализированного вытаслителя 3, демо дулятора 4, датчика 5 частоты вращения, элемента 6 сравнения, исполнительного устройства 7, обмотки 8 возбуждения. Датчик 5 подключен к валу испытываемого двигателя 9. Система работает следующим образом. Двигатель 9 сочленен с электрогенератором 1 постоянного тока (ЭПТ), цепь якоря которого соединена с неизменным активным сопро тивлением 2. Специализированный вычислитель 3 (аггалоговый или достаточно быстродействующий цифровой) на основании и11формации о текущем значении напряжения Vg на зажимах активного сопротивления 2, а также о частоте п вращения коленчатого вала испытуемого двигателя, постунающего через демодулятор 4 с мапштоимпульсного или иного датчика 5 частоты вращения, формирует сигнал отрицательной обратной связи, пропорциональный текущему значению электромагнит ного момента Мэ сопротивлению ЭПТ или поглощаемой цепью якоря мощности N3 (второй режим необходим при испытаниях транспортных двигателей). При этом осуществляется коррекция указанного сигаала с целью компенсации влияния маховых масс ЭПТ, а также учета механических потерь, имеющих место в ее подвижных узлах. Сигнал с выхода вычислителя 3 поступает иа один нз входов элемента 6 сравнения, в то время на другой его вход подается программный сигнал (Мп или Nn). Полученный такрм образом сигнал рассогласования ( fM или AN) поступает на вход исполнительного устройства 7, которое воздействует на обмотку 8 возбуждения ЭПТ так, чтобы вызвать форсированное изменение величины Vf; в направлении, обеспечивающем ликвидацию раЬсогласования. Предлагаемый способ регулирования позволяет учесть потери холостого хода ЭПТ. Эти потери слагаются из магнитных потерь, а также механических потерь, обусловленных наличием трения в узлах машины. Как магнитные, так и механические потери зависят от скорости вращения якоря. Кроме того, магнитные потери зависят еще от величины магнитного потока возбуждения, который при полюсном регулирующем воздействии является переменной величиной. В современных ЭПТ эти потери незначительны и их влиянием представляется возможным пренебречь. Таким образом, потери холостого хода ЭПТ определяются главным образом механическим трением, в ее подвижных узлах, Если закон изменения мощности трения имеет нелинейный характер, т.е. если MX t Kj или соответственно N В , то в цепи отридательной обратной связи необходимо реализовать следующие функции: + Вп, где К, В - константы коррекции соответственно величины электромагнитного момента сопротивления ЭПТ и поглощаемой цепью якоря мощности, А и Ал - постоянные, п - частоты вращения. Следует отметить, что при необходимости коррекция сигнала обратной связи по потерям холостого хода может осуществляться и в соответствии со значительно более сложными законами. Кроме того, в данном случае необходимо осуществлять еще одну дополнительную частотную коррекцию этого сигнала с целью компенсации влияния момента инерции вращающихся масс ЭПТ. Экспериментальное исследование этой системы показало, что в диапазоне частот программного сигнала 0-1,0 Гц при предусмотренной степени интенсификации переходных процессов в цепи возбуждения ЭПТ системы регулирования полностью инвауиантна относительно частотного возмущения со стороны испытуемого двигателя и представляет собой практически безьшерционный канал проводимости.
Процесс отработки проиллюстрирован иа фиг. 2, где кривая А представляет собой фрагмент отработки описываемой системой, показанного в виде кривой Б случайного программного сигнала (кривые А и Б искусственно раздвинуты). Здесь изменение частоты вращения (кривая В) испытуемого двигателя вызвано случайным воздействием иа регулятор скорости последнего, которые осуществлялось в диапазоне частот 0-0,7 Гц с полй)щью соответствующей следящей системы, а также функционированием собственно регулятора скорости.
Предлагаемый способ, как показьшае опыт, обеспечивает весьма высокие показатели качества процесса регулирования, так как позволяют установить практически однозначную связь между напряжением на зажимах нагрузочного сопротивления (зажимах внутренней цепи ЭПТ) и поглощаемой цепью якоря мощностью, а при соответствующем использовании информации о текущей частоте вращения коленчатого вала двигателя и электромагнитным моментом сопротивления ЭПТ; кроме того, избавиться от перерегулирования, т.е. радикально повысить качество регулирования при высоком быстродействии и абсолютной устойчивости системь регулирования, так как ее свойства практически полностью определяются дина апескимй показателями целя возбуждения ЭПТ (цепь якоря я прочие элементы и устройства регулирующего контура практически безынерционны).
jФормула изобретения
Способ регулирования нагрузки двигателя внутреннего сгорания на испытательном стенде путем соединения вала двигателя с электрогеHepaiopoMi а обмотки эл ектрогенератора с неизменным активным сопротивлением, измерения напряжения на зажимах аостпвного сопротивления, измерения частоты вращения вала двигателя, формирования и подачи сигнала отридательной обратаой связи в обмот-ку электрогенератора, отличающийс я TesM, что, с целью повшоения быстродействия и качества регулирования, сипгал отрицательной обратной связи формируют посредством нелинейного преобразования результатов измерений частоты вращения и напряжения.
Источники информацта, принятые во внимание при экспертизе 1. Стефановский Б. С. и др. Испытание двигателей внутреннего сгорания. М., Машиностроение, 1972, с. 368.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования скорости вращения двигателя внутреннего сгорания на испытательном стенде | 1979 |
|
SU873008A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 2016 |
|
RU2623625C1 |
| Стенд для испытания двигателя внутреннего сгорания | 1978 |
|
SU748162A1 |
| Стенд для испытания двигателей | 1990 |
|
SU1760429A1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| ИСПЫТАТЕЛЬНАЯ СТАНЦИЯ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2005 |
|
RU2300117C1 |
| Стенд для испытания передач | 1984 |
|
SU1196718A1 |
| Стенд для динамических испытаний транспортных средств | 1987 |
|
SU1495666A1 |
| Автоматический стенд для испытания передач | 1985 |
|
SU1295260A1 |
| СТЕНД ДЛЯ НАГРУЖЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1814385A1 |

Ч
у
()
tfCfff)
