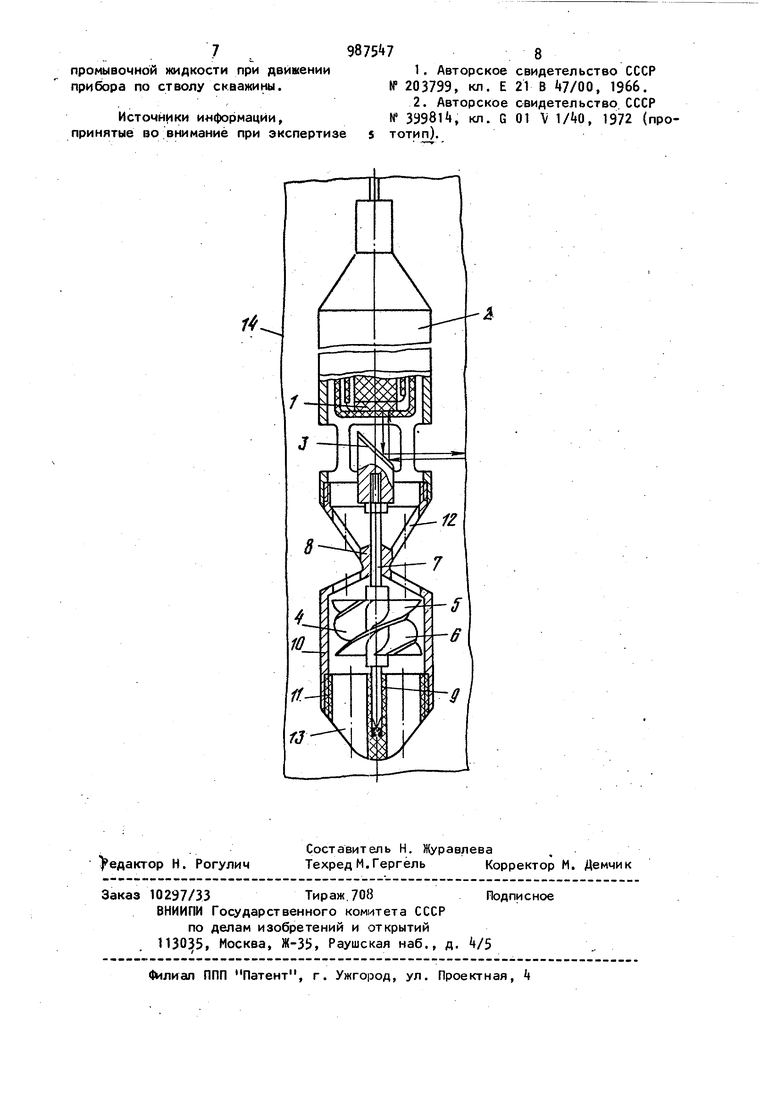
(Ц) СКВАЖИННЫЙ КАРОТАЖНЫЙ ПРИБОР Изобретение относится к области промысловых геофизических исследований скважин и может быть использовано преимущественно в аппаратуре с круговым обзором (скважинные акустические телевизоры, акустические профилемеры-каверномеры и др.). Известен прибор для исследования цементного кольца, за обсадной колонной в скважинах -с использованием рассеянного -излучения. Основным узлом прибора является вращающийся зонд, состоящий из цилиндрического экрана, в котором на одной образующей в узких пазах поме щены источник -излучения, сцинтил. ляционный индикатор с фотоумножителем, и электронного блока, укреплен ного в верхней части экрана. Электри ческая связь электронного блока с каротажным кабелем осуществляется с помощью вращающегося коллектора. При работе электродвигатель с помощью,эластичной муфты через пониже ющий редуктор приводит во вращение зонд, который производит сканирование стенок скважин с помощью рассеянного jf-излучения через коллимационные окна в экране зонда. Скорость вращения зонда регулируется с поверхности путем изменения напряжения питания электродвигателя Ij. Необходимость вращения всего зонда обуславливает применение довол1 но мощного двигателя и рассчитанного на большие нагрузки редуктора, что в условиях ограниченных габаритов скважинного прибора не позволяет обеспечить достаточную надежность конструкции. Не вполне надежным является и коллектор для связи жил кабеля с вращающимся вместе с зондом электронным блоком. Наиболее близким к изобретению является сква}|а1нный каротажный Г1рибор для акустического видеокаротаща, содержащий электроакустический датчик, электронный блок и сканирующий , установленный с возможностью вращения в азимутальной плоскости. Кроме того, каротажный прибор содержит электродвигатель, понижающий редуктор, а сканирующий элемент выполнен в виде металлического отражателя, помещенного в цилиндр с жидкостью с окном напротив звукопроводящей вставки. Электроакустический датчик установлен неподвижно, а отражатель, наклоненный под углом 45° к оси прибора, в процессе каротажа равномерно вращается, обеспечивая сканирование стенок скважины. Режим вращения задается двигателем и редуктором. Ультразвуковые импульсы возбуждаются электроакустическим датчиком и с отражателя направляются через окно и звукоподводящую вставку на стенки скважины, а затем, отразившись от стенок, тем же путем через отражатель попадают снова на электроакус тический /:1,атчик, который в это время включен на прием. Электронная схема обеспечивает возбуждение ультразвуковых импульсов, усиление принятого отраженного сигнала и синхрониза цию. Усиленный сигнал через каро тажный кабель поступает на наземную регистрирующую аппаратуру. Поскольку в процессе сканирования наряду с вра щением отражателя имеет место поступательное движение, связанное с подъемом скважинного прибора, то траекторией сканирующего луча является винто вая линия. Для получения максимально подробной информации шаг винтовой ли нии должен соответствовать ширине датчика с небольшим превышением, учи тывающим рассеивание. В этом случае строки сканирования не накладываются друг на друга, а следуют непосредственно одна за другой без потери ин формации . Обеспечение необходимого соответствия между скоростью подъема прибора и числом оборотов сканирующего элемента,осуществляется регули рованием с поверхности числа оборотов электродвигателя 2. Недостатки известного устройства связаны с изменени ем шага сканирова ния из-за нестабильности скорости подъема прибора в процессе каротажа, что имеет место,например, при увели-: чении диаметра Лебедки с кабелем, по меое увеличения количества намотанного на лебедку кабеля или в связи с воздействием вибрации на регулятор газа двигателя подъемника и в других случаях. Изменение шага сканирования прим водит к накладыванию строк друг на друга при уменьшении скорости каротажа, или к увеличению межстрочного расстояния при увеличении скорости каротажа. В первом случае имеет место искажение информации, а во втором случае пропускается ( и теряется информация об участках поверхности скважины между строками. Все это приводит к снижению разрешающей способности, к потере информации об относительно мелких деталях в акустическом изображении стенок скважины. Целью изобретения является повышение точности путем сохранения разрешающей способности при изменении скорости каротажа. Указанная цель достигается тем, что скважинный каротажный прибор, содержащий электроакустический датчик, электронный блок и сканирующий эле-мент, установленный с возможностью вращения в азимутальной г-шоскости, дополнительно содержит винтовые лопасти, кинематически связанные со сканирующим элементом помещенные в камеру, имеющую окна для пропуска промывочной жидкости при движении прибора по стволу скважины На чертеже изображен акустический скважинный каротажный прибор для сканирования рельефа стенок скважины - акустический прос1 1лемер, Функциональными узлами прибора являются электроакустический датчик 1, электронный блок 2, сканирующий элемент 3; винтовые лопасти 4-6 вал 7. Электронный блок герметичен и через электровводы подключен к элект роакустическому датчику, В электронном блоке размещены схема синхронизации, схема возбуждения, усилитель, детектор. Сканирующий элемент представляет собой металлический отражатель, рабочая поверхность которого наклонена под углом 45 к оси прибора. Отражатель укреплен на валу 7, который установлен в подшипниках 8 и 9. На этом же валу укреплены собранные на втулке винтовые лопасти -6. Лопасти защищены от механических повреждений кожухом 10, который вместе с наконечником 11 образует камеру. Камера при нахождении прибора в сква жине заполнена промывочной жидкостью, поступающей туда через окна 12 в кожухе 10 и через окна 13 в наконечнике 11., При работе прибора, расположенная в электронном блоке 2, схема возбуж дения периодически возбуждает электроакустический датчик 1, который генерирует пакет упругих (ультразвуко вых) колебаний. Эти колебания прелом ляются отражателем сканирующего элемента 3 и выводятся радиальным лучо на расположенный напротив сканирующего элемента участок стенки скважины И. Часть колебаний, отразившись от стенки скважины, возвращается на отражатель, преломляется и поступает на тот же электроакустический датчик, работающий теперь уже в качестве приемного преобразователя упругих колебаний. Электрические колебания с выхода датчика поступают на усилитель и детектор, а затем через каротажный кабель - на наземное регистрирующее устройство, визуализирующее поступающую информацию. Схема синхронизации обеспечивает переключение режима работы с возбуждения на прием и формирование сйнхроимпуль сов для синхронизации наземного регистрирующего устройства. Получение информации о рельефе стенок скважины осуществляется при перемещении прибора (с помощью лебедки подъемника и каротажного кабеля) от забоя к дневной Г1оверхности. Неподвижный слой промывочной жидкости, заполняющей скважину, оказывает сопротивление движущемуся при бору и его частям, в том числе винтовым лопастям, перемещающимся относительно той части столба жидкости, которая благодаря окнам оказыва ется в камере. Сила сопротивления жидкости, приложенная при движении прибора к винтовым лопастям, создает- на валу 7 вращающийся момент, который через вал передается на сканирующий элемент 3) обеспечивая его вращение в плоскости , перпендикулярной оси прибора. Вращаясь, сканирующий элемент 3 облучает ультразвуковыми импульсами стенки скважины. Поскольку кроме вращательного движения отражатель осуществляет вместе со скважинным прибором и поступательное движение, то траектория сканирующего луча на стенке скважины представляет собой, винтовую линию с шагом t,прямо пропорциональным скорости подъема прибора (скорости каротажа) V и обратно пропорциональным числу оборотов п отражателе за единицу времени, т.е. t й Для обеспеченная максимальной разрешающей способности шаг сканирования устанавливается равным ширине строки сканирования. В этом случае строки не накладываются друг на друга и в то же время нет пропуска информации между строками. Поскольку число оборотов п лопастей и связанного с ними отражателя прямо пропорционально скорости V подъема прибора, то при изменении скорости движения прибора в равной степени изменяются и числитель и знаменатель выражения для шага t винтовой траектории сканирующего луча, т.е. шаг сканирования в реальном диапазоне скоростей не зависит от скорости движения скважинного прибора, а является постоянной величиной, определяемой конструкцией и геометрией лопастей, вязкостью и плотностью жидкости и рядом других факторов, постоянных для конкретных каротажных УСЛОВИИ. Постоянство шага сканирования, а следовательно, и сохранение оптимального размещения строк акустического изображения при отклонении скорости каротажа от номинальной, обеспечивает сохранение разрешающей способности и получение высококачественной ин-, формации в широком диапазоне изменений скорости каротажа практически при любой ее нестабильности. Формула изобретения Скважинный каротажный прибор, содержащий электроакустический датчик, электронный блок и сканирующий элемент, установленный с возможностью вращения в азимутальной плоскости, о.тл и чающийся тем, что с целью повышения его точности путем сохранения разрешающей способности при изменении скорости каротажа, прибор дополнительно содержит винтовые лопасти, кинематически связанные со сканирующим элементом, помещенные в камеру, имеющую окна для пропуска

| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический профилемер подземных полостей, заполненных жидкостью | 1989 |
|
SU1786458A1 |
| Аппаратура для акустического каротажа на отраженных волнах | 1984 |
|
SU1239670A1 |
| СПОСОБ, СИСТЕМА И СКВАЖИННЫЙ ПРИБОР ДЛЯ ОЦЕНКИ ПРОНИЦАЕМОСТИ ПЛАСТА | 2007 |
|
RU2419819C2 |
| СКВАЖИННЫЙ АКУСТИЧЕСКИЙ СКАНЕР | 2015 |
|
RU2614193C1 |
| СПОСОБ ПРОВЕДЕНИЯ КАРОТАЖНЫХ РАБОТ В СКВАЖИНЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2447279C2 |
| Скважинный прибор акустического видеокаротажа | 1972 |
|
SU437035A1 |
| Акустический зонд для каротажных исследований | 1985 |
|
SU1437820A1 |
| Скважинный зонд каротажной аппаратуры | 1975 |
|
SU765771A1 |
| СКВАЖИННЫЙ ГЕОЛОКАТОР | 1965 |
|
SU172507A1 |
| ИНТРОСКОП МАГНИТНЫЙ СКВАЖИННЫЙ | 2008 |
|
RU2382357C1 |
