дачи перемещений смещается к объект изгибая упругий подвес штока. При этом объект исследования подвергается иэгибным деформациям, что значительно искажает результаты испытаний. Для того, чтобы избежать изгиных деформаций объекта исследований необходимо увеличить длину горизонтальных плеч параллелограмма,- что в свою очередь увеличивает габаритные размеры механизма передачи пере мещений.
Целью изобретения является расширение диапазона измерения, что особенно актуально при исследовании объектов на эластичных материгшов с большими относительными удлинениями - деформациями, доходяшд1ми до 1000% и выше, при воздействии повышенных температур.
Указанная цель достигается тем, что устройство для измерения линейНОЙ деформации объекта, содержащее основание, закрепленный на нем цилиндр с установленным в его полости штоком, два измерительных наконечника, которые предназначены для уст новки на объект, рычаг, соединенный с одним из измерительных н.аконечников, жесткий подвес, концы которого шарнирно соединены с цилиндром и со свободным концом рычага, и измеритель, взаимодействующий с одним из концов штока, снабжено механизмом с гибкой связью, выполненным в виде уравнительного блока, связанного со вторым концом штока, трех пар направляющих блоков, первая из которых установлена внутри цилиндра в месте крепления подвеса, а две.другие на концах рычага с обеих сторон, и нерастяжимой нити, огибающей блоки и закрепленной на втором измерительном наконечнике, . .
Такое конструктивное решение обеспечивает точную передачу на измеритель деформации, при дтом относительное удлинение может достигать 1000% и более. А заданный диапазон измерения обеспечивается соответствующим выбором длины гибкой нити, Так, если относительное удлинение
,. материала исследуемого объекта достигает 1000%, то длины гибкой нити должно хватать на крайнее положение наконечников установки на объект когда расстояние между ними увеличивается в 10 раз по сравнению с Пврвоначал;ьным,
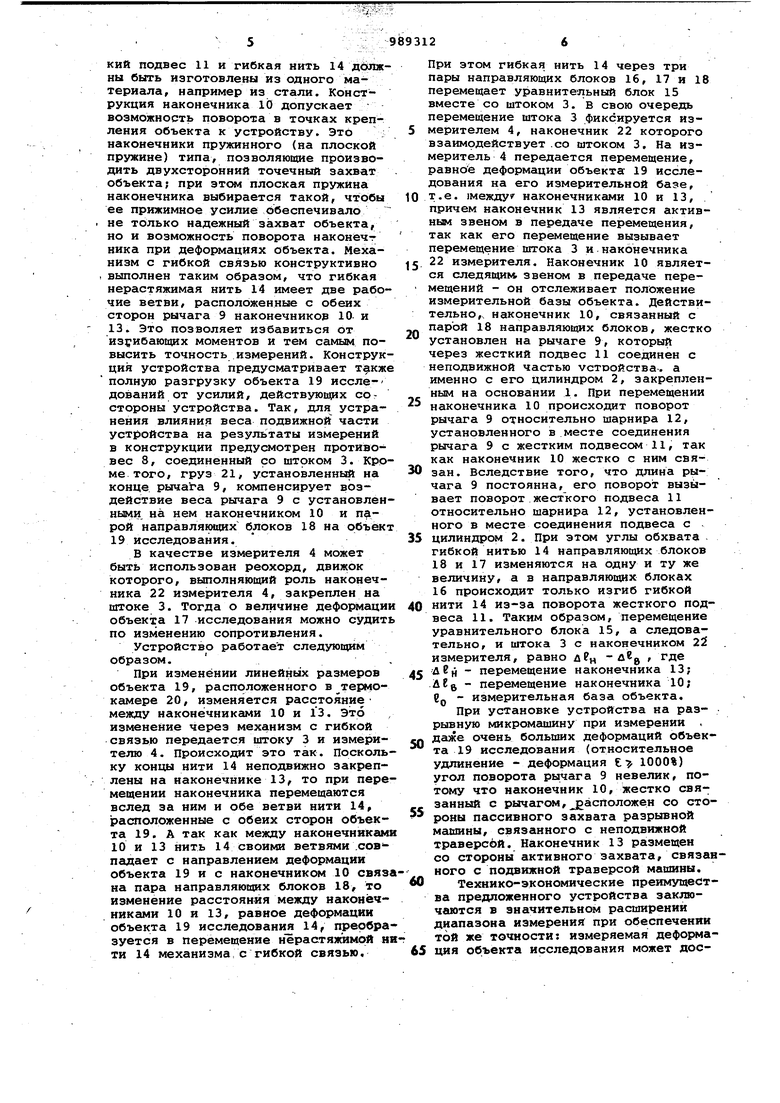
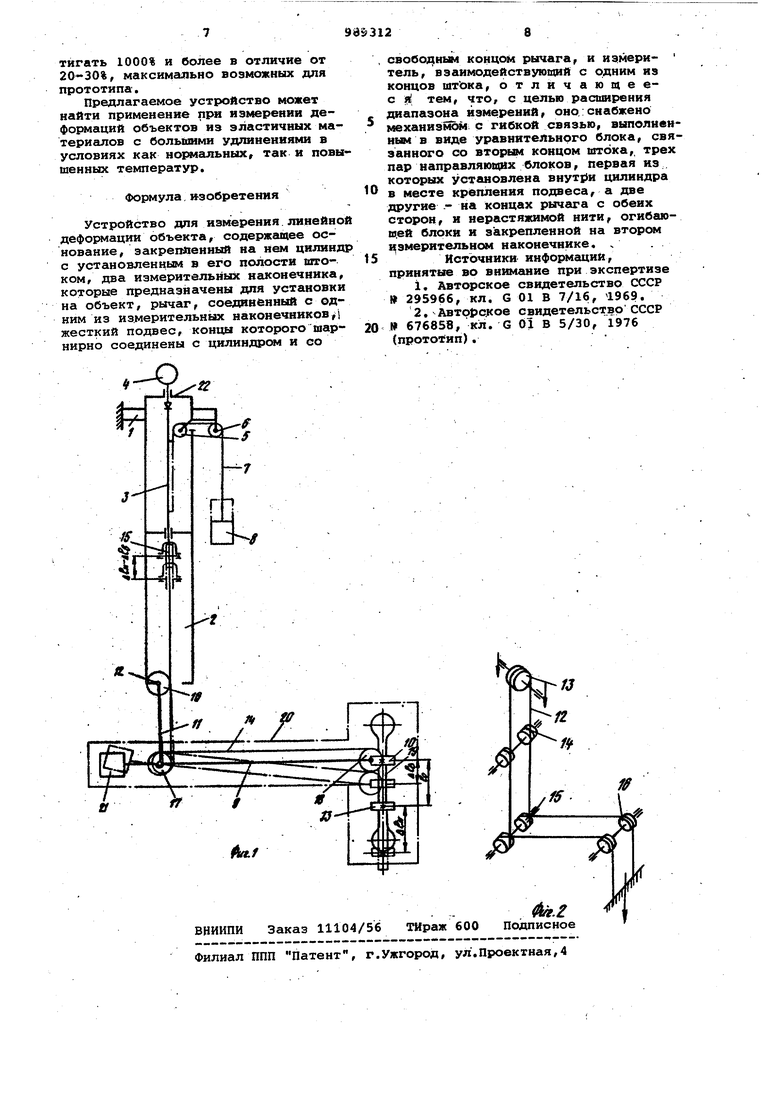
На фиг,1 изображена прйнципиальмая кинематическая схема устройства для измерения деформаций объекта; на фиг,2 - схема запасовки нерастяжимой нити.
Устройство для измерения деформаций объекта состоит из основания 1, закрепленного на нем цилиндра 2, внутри которого размещен шток 3.
один конец штока 3 соединен с измерителем 4, Со штоком 3 через два блока 5 и б, установленных на основании 1, и гибкую связь 7 соединен противовес 8, служащий для устранения влияния веса подвижной части устройства на результаты измерений,
8состав устройства входит также рычаг 9 с измерительным наконечником 10, жестко с ним связанным, и жесткий подвес 11, концы которого с помощью шарниров 12 зак зеплены на цилиндре 2 и рычаге 9, а также механизм с гибкой связью, который установлен между свободным концом штока 3. и измерительным наконечником 13, Механизм с гибкой связью выполнен в виде нерастяжимой нити 14, которая перекинута через уравнительны блок 15, установленный на свободном конце штока 3. Ветви нити 14 последовательно перекинуты через три пары направляющих блоков 16, 17и 18, Первая пара направляющих блоков 16 размещена внутри цилиндра 2 в месте крепления жесткого подвеса 11, Две другие пары направляющих блоков 17
и 18 размещены с обеих сторон рычаг
9на его концах: пара 17 - в месте крепления жесткого подвеса 11 к рычагу 9, а пара 18 - в месте жесткого крепления наконечника 10 к рычагу 9. Концы нити 14 неподвижно закреплены на наконечнике 13 установки с двух его сторон. При таком конструкт.ивном решении механизма
с гибкой связью ветви гибкой нити 14 с двух сторон охватывают объект 19 исследования, тем самым исключая его изгиб. В наконечниках 10 и 13 закрепляется объект 19 исследования Он вместе с рычагом 9 и частью механизма с Гибкой связью расположен в термокамере 20, Для обеспечения, компенсации температурной погрешности цилиндр 2 со 3, часть жесткого подвеса 11 и механизма с гибкой связью вынесены за пределы термокамеры 20, На конце рычага 9 установлен груз 21, служащий для устранения влияния веса рычага 9 с установленными на нем наконечником
10и парой направляющих блоков 18 на объект 19 исследования, а следовательно, и на результаты измерений Для передачи штоком 3 на наконечник 22 измерителя 4 через механизм
с гибкой связью истинного (неискаженного) значения деформации объекта 19 исследований необходимо, чтобы между наконечниками 10 и 13 гибкая нить 14 (зврими ветвями совпадала с направлением деформации объекта 19 исследования,- т,е, ажно правильно (без перекосов) устанавливать объект исследования в устройство, кроме того, для компенсации температурной логреишости измерений рычаг 9, жесткий подвес 11 и гибкая нить 14 дйлжны быть изготовлены из одного материала, например из стали. Конструкция наконечника 10 допускает возможность поворота в точках крепления объекта к устройству. Это ; наконечники пружинного на плоской пружине) типа, позволяющие производить двухсторонний точечный захват объекта; при этом плоская пружина наконечника выбирается такой, чтобы ее прижимное усилие обеспечивало не только надежный захват объекта, но и возможность поворота наконечника при деформациях объекта. Механизм с гибкой связью конструктивно выполнен таким образом, что гибкая нерастяжимая нить 14 имеет две рабочие ветви, расположенные с обеих сторон рычага 9 наконечников 10 и 13. Это позволяет избавиться от изгибающих моментов и тем самым повысить точность измерений. Конструкция устройства предусматривает полную разгрузку объекта 19 исследований от усилий, действующих состороны устройства. Так, для устранения влияния веса подвижной части устройства на результаты измерений в конструкции предусмотрен противовес 8, соединенный со штоком 3. Кроме того, груз 21, установленный на конце рычага 9, компенсирует воздействие веса рычага 9 с установленными на нем наконечником 10 и парой направляющих блоков 18 на объек 19 исследования.
В качестве измерителя 4 может быть использован реохорд, движок которого, выполняющий роль наконечника 22 измерителя 4, закреплен на штоке 3. Тогда о величине объекта 17 исследования можно судит по изменению сопротивления.
Устройство работает следующим образом.
При изменении линейных размеров объекта 19, расположенного вдермокамере 20, изменяется расстояние между наконечниками 10 и 13. Это изменение через механизм с гибкой связью передается штоку 3 и измерителю 4. Происходит это так. Поскольку концы нити 14 неподвижно закреплены на наконечнике 13, то при перемещении наконечника перемещаются вслед за ним и обе ветви нити 14, расположенные с обеих сторон объекта 19. А так как между наконечникам 10 и 13 нить 14 своими ветвями .совпадает с направлением деформации объекта 19 и с наконечником 10 связна пара направляющих блоков 18, то изменение расстояния между наконечниками 10 и 13, равное деформации объекта 19 исследование 14, преовразуется в перемещение нерастяжимрй нти 14 механизма,с гибкой связью.
При этом гибкая нить 14 через три пары направляющих блоков 16, 17 и 18 перемещает уравнительный блок 15 вместе со штоком 3. в свою очередь перемещение штока 3 фиксируется измерителем 4, наконечник 22 которого взаимодействует .со штоком 3. На измеритель 4 передается перемещение, равное деформации объекта 19 исследования на его измерительной базе, т.е. )между наконечниками 10 и 13, причем наконечник 13 является активным звеном в передаче перемещения, так как его перемещение вызывает перемещение штока 3 и наконечника 22 измерителя. Наконечник 10 являет5ся следящим звеном в передаче перемещений - он отслеживает положение измерительной базы объекта. Действительно,, наконечник 10, связанный с парой 18 направляющих блоков, жестко
0 установлен на рычаге 9, который через жесткий подвес 11 соединен с неподвижной частью устройства-, а именно с его цилиндром 2, закрепленным на основании 1. При перемещении
5 наконечника 10 происходит поворот рычага 9 относительно шарнира 12, установленного в.месте соединения рычага 9 с жестким подвесом 11, так как наконечник 10 жестко с ним свя0зан. Вследствие того, что длина рычага 9 постоянна, его поворот вызывает поворот . жестокого подвеса 11 относительно шарнира 12, установленного в месте соединения подвеса с .
5 цилиндром 2. При этом углы обхвата гибкой нитью 14 направляющих блоков 18 и 17 изменяются на одну и ту же величину, а в направляюпдах блоках 16 происходит только изгиб гибкой нити 14 из-за поворота жесткого под0веса 11. Таким образом, перемещение уравнительного блока 15, а следовательно, и штока 3 с наконечником 22 измерителя, равно дрц Д® дСц - перемещение наконечника 13;
5 - перемещение наконечника 10; 8р - измерительная база объекта.
При установке устройства на разрывную микромашину при измерении . даже очень больших деформаций объек0та 19 исследования (относительное удлинение - деформация С 1000%) угол поворота рычага 9 невелик, потому что наконечник 10, жестко связанный с рычагом, расположен со сто5роны пассивного захвата разрывной машины, связанного с неподвижной траверсой. Наконечник 13 размещен со стороны активного захвата, связанного с подвижной траверсой машины.
0
Технико-экономические преимущества предложенного устройства заключаются в значительном расширении диапазона измерения при обеспечении той же точности: измеряемая деформация объекта исследования может дос5
| название | год | авторы | номер документа |
|---|---|---|---|
| Тензометрическое устройство для измерения линейной деформации объектов | 1989 |
|
SU1665218A1 |
| Устройство для определения остаточных напряжений | 1990 |
|
SU1765688A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕОЛОГИЧЕСКИХ СВОЙСТВ СНЕЖНОГО ПОКРОВА | 2008 |
|
RU2396539C2 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2008 |
|
RU2365916C1 |
| Устройство для измерения профиля объекта | 1990 |
|
SU1796872A1 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ КАРТИН, ПЛАНШЕТОВ, ПЛАКАТОВ, РЕКЛАМНЫХ ПРОСПЕКТОВ И ЧЕРТЕЖЕЙ | 1999 |
|
RU2153832C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК СЛОЯ ПОЧВОГРУНТА | 2013 |
|
RU2540432C1 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ ПРОИЗВЕДЕНИЙ ИСКУССТВА, ПРЕДПОЧТИТЕЛЬНО КАРТИН (ВАРИАНТЫ) | 2006 |
|
RU2301008C1 |
| Устройство для измерения размеров трубы | 1990 |
|
SU1747862A1 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ ПОЛОТЕН КАРТИН, РАЗМЕЩЕННЫХ ПРЕДПОЧТИТЕЛЬНО В РАМАХ | 2006 |
|
RU2304915C1 |
