Изобретение относится к системам автоматического контроля и преобразования перемещений в дискретный электрический сигнал, а именно к преобразователям линейного перемещения в код.
Известен преобразователь линейных перемещений в электрический сигнал, содержащий первичную обмотку, намотанную на немагнитную трубу по всей длине измеряемого диапазона, и дополнительные обмотки, а в трубе перемещается якорь из ферромагнитного материала 1.
Недостатками данного устройства являются: технологическая трудность намотки первичной обмотки, особенно для преобразователей больших линейных перемещений; объем информации о положении контролируемого органа ограничен числом вторичных обмоток датчика, которые можно разместить на заданном диапазоне измерения, так как это число равно количеству дискретных точек, в которых происходит выдача информационного сигнала.
Наиболее близким по технической сущности к изобретению является преобразователь линейного перемещения в код, содержащий поплавок - якорь из ферромагнитного материала, трансформаторные датчики с разомкнутыми магч нитопроводг.ми, помещенные в трубе из немагнитного материала, реле, блок памяти, дешифратор номера датчика, вторичные обмотки датчика объединены поразрядно по группам, и один из выводов группы через реле соединен с соответствующим входом блока памяти, а вторые выводы групп объединены
10 вместе, вторичные обмотки соед инены по группам последовательно, а внутри каждой группы они включены попарно-встречно 2 .
Однако этот преобразователь также
15 обладает недостатками, а именно: при большом количестве дискретных очвк контроля устройство должно содержать большое количество датчиков, так как их число должно быть равно числу ди20скретных точек; наличие в схеме индикации блока памяти создает возможность потери информации при обесточивании устройства; расположение датчиков внутри трубы исключает доступ
25 к обмоткам датчика при регулировке и смене их во время эксплуатации и ремонта.
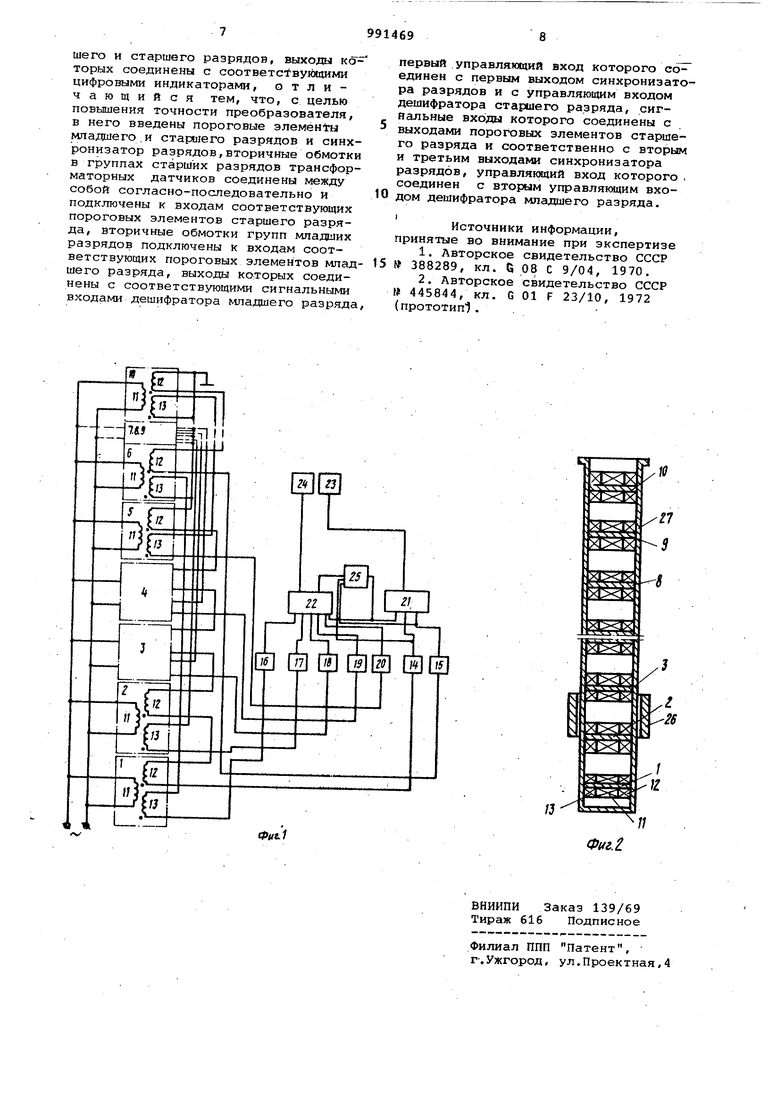
Цель изобретения - повыгчение точности преобразователя за счет умень30шения шага дискретности. Поставленная цель достигается тем что в преобразователь линеЛиого перемещения в код, содержащий ферромаг нитный якорь, трансформаторные датчики с первичными обмотками и с вторичными обмотками младшего и старшего разрядов, первичные обмотки соеди нены параллельно и подключены к шинам переменного напряжения, вторичные обмотки объединены поразрядно Б группы, вторичные обмотки в группах младшего разряда соединены между собой попарно-встречно, и дешифраторы младшего и старшего разрядов, выходы которых соединены с соответству ющими цифровыми индикаторами, введены пороговые элементы младшего и старшего разрядов и синхронизатор разрядов, вторичные обмотки в группах старших разрядов трансформаторных датчиков соединены между собой согласно-последовательно и подключеНы к входам соответствующих пороговых элементов старшего разряда, вто ричные обмотки групп младших разряг ДОН подключены к входам соответствую щих пороговых элементов младшего раз ряда, выходы которых соединены с соответствующими сигнальными входами д шифратора младшего разряда, первый управляю ций вход которого соединен с первым выходом синхронизатора разрядов и с управляющим входом дешифра тора старшего разряда, сигнальные входы которого соединены с выходами пороговых элементов старшего разряда и соответственно с вторым и третьим выходами синхронизатора разрядов, управляющий вход которого соединен с вторым управляющим входом дешифратора младшего разряда. На фиг. 1 показана структурная .схема преобразователя; на фиг. 2 пример расположения якоря и трансфор маторных датчиков. Преобразователь линейного перемещения в код содержит трансформаторны датчики 1 - 10 с обмотками 11 старше го 12 и младшего 13 разрядов, порого вые элементы старшего 14 и 15 и млад шего 16 - 20 разрядов, подключенные соответственно к дешифраторам старше го 21 и младшего 22 разрядов, цифровые индикаторы 23 и 24, синхронизато 25 разрядов. Кроме того/ на фиг. 2 показан фер ромагнитный якорь 26, охватывающий трубу 27, в которой расположены тран сформаторные датчики. Возможен вариант размещения трансформаторгых датчиков снаружи трубы, в этом случае ферромагнитный якорь расположен внутри трубы. Преобразователь линейного перемещения в код работает следующим образом. При достижении якорем 26 (фиг. 2) положения, при котором он замыкает магнитную цепь датчика 1, сигнал с обмоток 13 и 12 поступает на входы пороговых элементов 16 и 17 (фиг. 1), а с выходов этих элементов через дешифраторы младшего 22 и старшего 21 разрядов на цифровые индикаторы 24 и 23 соответственно. Весь диапазон измерения в приведенном примере разбит на два диапазона. При указанном положении якоря 26 индикатор 24 высвечивает цифру 1, а индикатор 23 - цифру 0. При дальнейшем перемещении якоря 26 последний занимает положение, при котором замыкает магнитопроводы датчиков 1 и 2 в соответствии с условием 2 Д Е 4, г:де Р - длина якоря, Л - шаг дискретности, и сигналы поступают на входы пороговых элементов 16 и 17. С выходов элементов 16 и 11 сигнал поступает на входы дешифратора 22, с выхода которого сигнал высвечивает в индикаторе 24 цифру 2, т.е. номер второй дискретной точки. При этом цифра 1 на индикаторе 24 гаснет, а на индикаторе старшего разряда 23 продолжает высвечиваться цифра О (первый поддиапазон измерения). При перемещении якоря 26 сигнал с обмотки 13 уменьшается, отключается пороговый элемент 16, и на вход дешифратора 22 поступает сигнал только с выхода порогового элемента 17. С выхода дешифратора 22 на цифровой индикатор 24 приходит сигнал на высвечивание цифры 3, а цифра 2 гасится в ин; икаторе младшего разряда. С дешифратора 21 на цифровой индикатор 23 поступает сигнал, который продолжает высвечивать цифру О на протяжении всего первого поддиапазона измерения, включающего 10 первых дискретных точек. Состояние пороговых элементов канала индикации младшего разряда для первого поддиапазона преобразователя с пятью трансформаторными датчиками в каждом поддиапазоне приведены в таблице. Последняя десятая дискретная точка в первом поддиапазоне формируется посредством включения пороговых элементов 20 и 15, т.е. когда якорь занимает положение, при котором замкнуты магнитопрлводы датчика 5, кото рый является последним датчиком первого поддиапазона, и датчика б, который является первым датчиком второго поддиапазона. При положении якоря 26, когда замкнуты магнитопроводы датчиков 5 и 6, сигналы датчиков поступают на пороговые элементы 14, 15 и 16, 20. С выходов пороговых элементов 14,15 и 16, 20 сигнсшы поступают на дешифратоЕял 22 и 21. При одновременном поступлении сигналов с пороговых элементов 14 и 15 и дешифратора 22 включается синхронизатор 25 -разрядов который выдает сигнал на зажигание цифры О в индикаторе 24 младшего разряда и цифры 1 в индикаторе 23 старшего разряда. При дальнейшем перемещении якоря 26 пороговые элементы 20 и 14 отключаются, а включенными остаются пороговые элементы 16. и 15, в результате чего на индикаторах представления информации высвечиваются цифры 1 и 1 свидетельствукядие о том, что якорь переместился, до первой дискретной точки во втором поддиапазоне измерения . При движении в обратном направлении якорь 26 закыкает магнитопроводы датчиков 6 и 5,в указанной последовател ности первым выдает сигнал датчик тем приходит сигнал с датчика. 5,включаются пороговые элементы 15, 16, 14 и 20, сигналы с которых вызывают срабатывание индикаторов через дешифраторы 22 и 21, высвечиваются на индикаторах 24 и 23 цифры О и 1 соответственно. При этом в момент отключения пороговых элементов 15 и 16 синхройизатор 25 разрядов через дешифратор 21 старшего разряда Ш:шает сигнал на отключение циф{Я:1 1 в индикаторе 23 и на включении цифры О в индикаторе 24. Таким образом, индикаторы 24 и 23 высвечивают цифры О и 9, свидетельствующие о том, что якорь находится в районе девятой дискретной точке в первом поддиапазоне измерений. логично работает преобразователь во всем диапазоне измерения. Формула изобретения Преобразователь линейного перемещения в код, содержащий.ферромагнитный якорь, трансформаторные датчики с первичными, обмотками и с вторичными обмотками младшего и старшего разрядов, первичные обмотки соединены параллельно и подключены к переменного напряжения, вторичные обмотки объединены поразрядно в группы, вторичные, обмотки в группах мпадшего разряда соединены между собой попарно-встречно, и дешифраторы млад

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1977 |
|
SU744697A1 |
| Преобразователь угол-код | 1983 |
|
SU1179528A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1977 |
|
SU734776A1 |
| Преобразователь перемещенийВ АНАлОгОВый СигНАл | 1978 |
|
SU815477A1 |
| Электромагнитный преобразователь перемещения в код | 1987 |
|
SU1439736A1 |
| Многоканальное устройство для регистрации | 1985 |
|
SU1322156A1 |
| Устройство для индикации линейных перемещений | 1975 |
|
SU600391A1 |
| Устройство для индикации линейных перемещений | 1979 |
|
SU859817A2 |
| Регулятор | 1984 |
|
SU1260913A1 |
| Преобразователь положения в код | 1989 |
|
SU1624689A1 |
