Изобретение относится к автоматике, вычислительной и иамерительной технике и может быть использовано для формирования управляющих сигналов, сигналов обратной связи и кор- рекции в гироскопических системах автоматического управления и регулирования.
Цель изобретения - повьшение точности регулятора при сохранении его рабочего диапазона за счет осуществ ления цифроаналогового преобразования не во всем диапазоне изменения с управляющего воздействия, а последовательно в отдельных его поддиапазонах, при одновременной компенсации различия в тепловыделении в обмотке датчика момента при переходе от одного поддиапазона к другому.
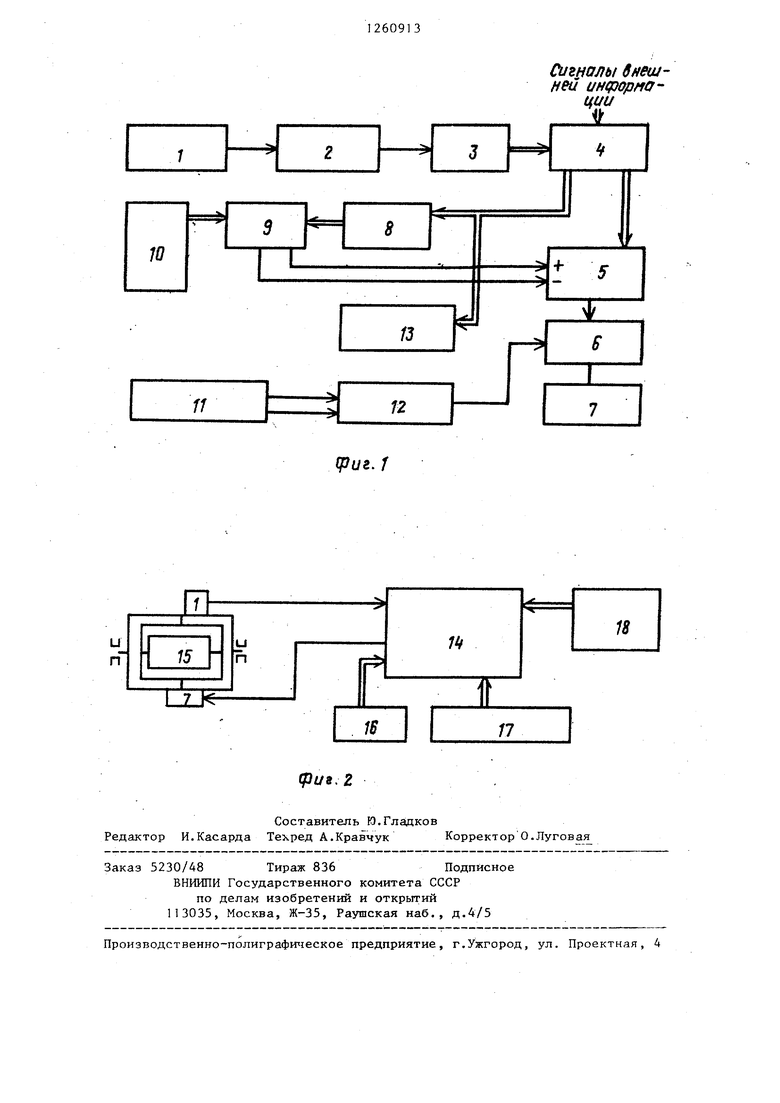
На фиг.1 приведена функциональная схема регулятора; на фиг.2 - функциональная схема примера системы автоматического управления, в которой может быть использован де- гулятор.
Регулятор содержит датчик 1 положения, усилитель 2, аналого-цифровой преобразователь 3, формирователь 4 сигнала управления, первый цифроаналоговый преобразователь 5, сумматор 6, моментный датчик 7, дешифратор 8, к оммутатор 9, источник 10 опорного напряжения, источник 11 переменного напряжения, второй цифроаналоговый преобразователь J2, блок 13 инверторов, регулирзто- щий блок 14, ротор 15 в кардановом подвесе, лаг 16, задатчик 17 широты, курсовзто систему 18.
Регулирующий блок 14 содержит усилитель 2, аналого-цифровой преобразователь 3, формирователь 4 сигнала управления, первый цифроаналоговый преобразователь 5, сумматор 6, дешифратор 8, коммутатор 9, источник 10 опорного напряжения, источник 11 переменного напряжения, второй цифроаналоговый преобразователь 12 и блок 13 инверторов.
В качестве датчика 1 положения использован индикатор горизонта, установленный на внешней рамке карданова подвеса ротора 15. В качестве коммутатора 9 использован управляющий делитель напряжения.
Регулятор работает следующим образом.
5
0
5
0
5
0
45
50
55
Выходной сигнал датчика 1 положения , несутдий информацию о положении ротора 15, т.е. объекта регулирования, усиленный с помощью усилителя 2, преобразуется аналого-цифровым преобразователем 3 в цифровой код. Этот код поступает в формирователь 4 сигнала управления вместе с сигналами внешней информации (фиг.1) , вырабатьтающий цифровой эквивалент сигнала управления, который подается на вход моментно- го датчика. 7, являющегося исполнительным органом. С зтой целью младшие разряды выходного кода формирователя 4 сигнала управления поступают на информационные входы цифро- аналогового преобразователя 5, выходное напряжение которого через сумматор 6 воздействует на обмотку моментного датчика 7. Знаковый и старшие разряды выходного кода формирователя 4 сигнала управления через дешифратор 8 поступают на управляющие входы коммутатора 9, осуществляющего изменение величины выходного напряжения источника 10 опорного напряжения. Выходное напряжение коммутатора 9 подается на входы питания первого цифроаналогового преобразователя 5. При этом выходное напряжение источника IО опорного напряжения в коммутаторе 9 разбивается на поддиапазоны, а напряжение нужного поддиапазона выбирается и подключается коммутатором 9 к входам питания второго цифроаналогового преобразователя 5 в зависимости от выходного сигнала дешифратора. Указанные цоддиапазоны выбираются в соответствии с поддиапазонами, на которые разбивается весь диапазон изменения управляющего воздействия, что позволяет при заданной разрядности выходного кода формирователя 4 сигнала управления и цифроаналогового преобразователя 5 получить наибольшую разрешающую способность регулятора в целом, поскольку величина шага квантования по уровню управляющего воздействия определяется как отношение максимального значения входного кода цифроаналогового преобразователя 5 к его питающему напряжению.
Знаковый и старшие разряды выходного кода формирователя 4 сигнапа управления поступают через блок I3
3
инверторов на информационные входы цифроаналогового преобразователя 12 который запитьшается переменным выходным напряжением с выходов источника 11 переменного напряжения. В результате на второй вход сумматора 6 поступает величина, дополнительная к максимальному значению напряжения на первом входе сумматора 6. Поскольку на второй вход сумма тора 6 поступает переменное напряжение, его выходной сигнал определяется только напряжением на первом входе, т.е. выходным сигналом цифроаналогового преобразователя 5. Мощность,выделяемая в обмотке управления моментного датчика 7, зависит от выходных напряжений цифроанало- говых преобразователей 5 и 12 и остается поэтому практически неизмен- ной при изменении выходного кода формирователя 4 сигнала управления.
Это, в свою очередь, позволяет обеспечить постоянство коэффициента передачи моментного датчика 7, а следовательно, и точность системы управления (фиг.2). В этой системе датчик 1 положения вырабатьшает напряжение, пропорциональное углу отклонения оси ротора 15 от плоскости горизонта. По этому сигналу, также сигналам, поступающим с выхо
11 и
01 10 00 00
1 1 1 о
609
5 О 5 20
5
0
134
доз лага 16, задатчика 17 широты и курсовой системы 18, формирователь 4 сигнала управления в регулирующем блоке 14 вырабатывает сигнал, осуществляющий приведение оси ротора 1 5 в плоскость горизонта, например , по след тощему алгоритму
Uj Э cos ч + V Sink tg ч
где р - выходной сигнал аналого- цифрового преобразователя 3 ;
Ч,V,К - соответственно широта, скорость и курс.
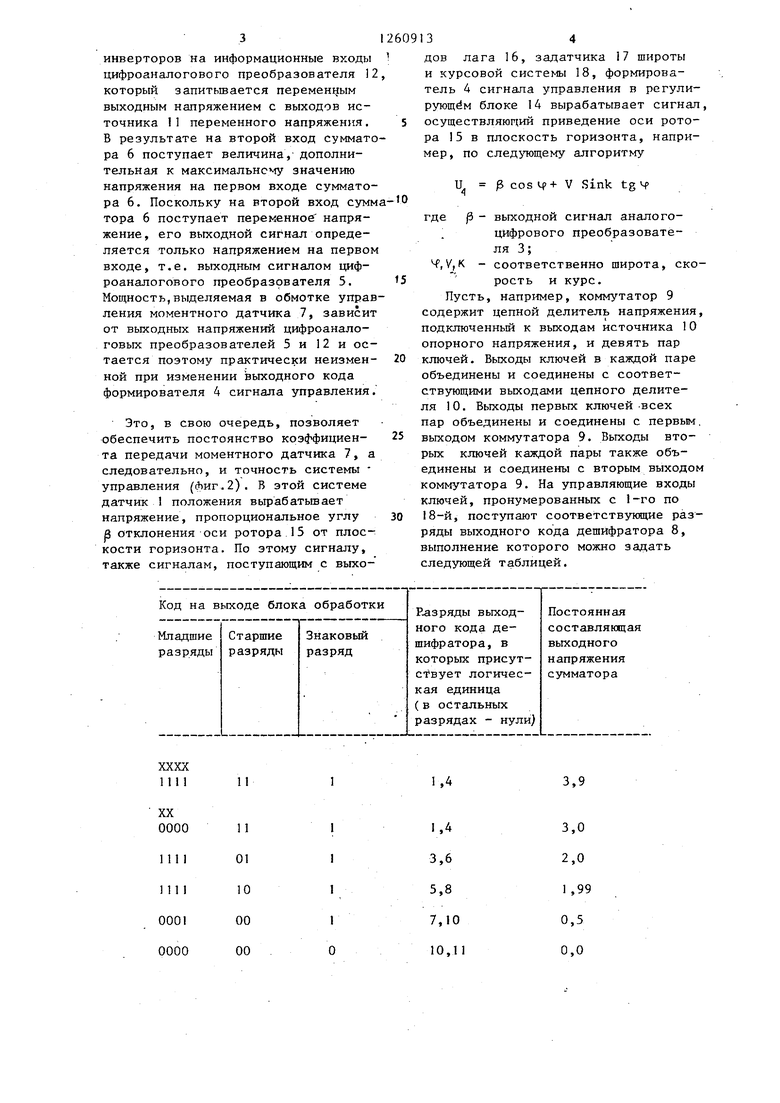
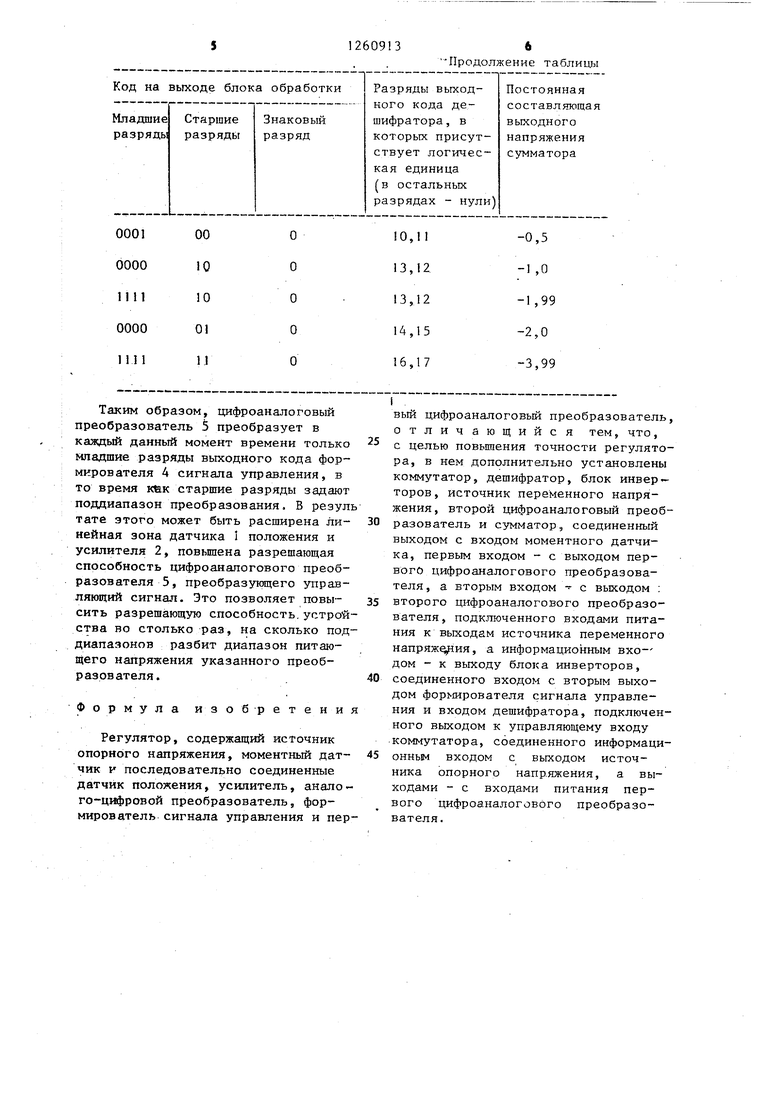
Пусть, например, коммутатор 9 содержит цепной делитель напряжения, подключенный к выходам источника 10 опорного напряжения, и девять пар ключей. Выходы ключей в каждой паре объединены и соединены с соответствующими выходами цепного делителя 10. Выходы первых ключей .всех пар объединены и соединены с первым, вькодом коммутатора 9. Выходы вторых ключей каждой пары также объединены и соединены с вторым выходом коммутатора 9. На управляющие входы ключей, пронумерованных с 1-го по 18-й, поступают соответствующие разряды выходного кода дещифратора 8, выполнение которого можно задать следующей таблицей.
3,9
3,0 2,0 1 ,99 0,5 0,0
Таким образом, цифроаналоговый преобразователь 5 преобразует в каждый данный момент времени только младшие разряды выходного кода формирователя А сигнала управления, в то время KfiK старшие разряды задают поддиапазон преобразования. В резуль тате этого может быть расширена ли- нейная зона датчика I положения и усилителя 2, повышена разрешающая способность цифроанапогового преобразователя 5, преобразующего управляющий сигнал. Это позволяет повы- сить разрешающую способность,устройства во столько раз, на сколько поддиапазонов разбит диапазон питающего напряжения указанного преобразователя.
Формула изобретения
Регулятор, содержащий источник опорного напряжения, моментный дат- чик и последовательно соединенные датчик положения, усилитель, аналого-цифровой преобразователь, формирователь сигнала управления и пер Продолжение таблицы
вый цифроаналоговый преобразователь, отличающийся тем, что, с целью повышения точности регулятора, в нем дополнительно установлены коммутатор, дешифратор, блок инвер-- торов, источник переменного напряжения, второй цифроаналоговый преобразователь и сумматор, соединенный выходом с входом моментного датчика, первым входом - с выходом первого цифроаналогового преобразователя , а вторым входом - с выходом : второго цифроаналогового преобразователя , подключенного входами питания к выходам источника переменного напряжория, а информационным вхо- дом - к выходу блока инверторов, соединенного входом с вторым выходом формирователя сигнала управления и входом дешифратора, подключенного выходом к управляющему входу коммутатора, соединенного информационным входом с выходом источника опорного напряжения, а выходами - с входами питания первого цифроаналогового преобразователя.
97иг. ;
(риа. Z
Составитель Ю.Гладков Редактор И.Касарда Техред А.Кравчук Корректор О.Луговая
Заказ 5230/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфи еское предприятие, г.Ужгород, ул. Проектная, 4
Сигналы внешне информо- цаи
L
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления (ее варианты) | 1985 |
|
SU1260915A1 |
| Устройство управления | 1984 |
|
SU1229721A1 |
| Регулятор | 1987 |
|
SU1462232A1 |
| Самонастраивающееся устройство управления | 1983 |
|
SU1130830A1 |
| Система управления | 1985 |
|
SU1302238A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1262730A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1531221A1 |
| Преобразователь среднего значения напряжения | 1982 |
|
SU1114964A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| Цифровой акселерометр | 1984 |
|
SU1242831A1 |
Изобретение относится к автоматике , вычислительной и измерит ельной технике и может быть использовано для формирования управляющих сигналов , сигналов обратной связи и сигналов коррекции в гироскопических , системах управления и регулирования. Целью изобретения является повьш1е- ние точности регулятора. Эта цель достигается за счет тогю, что аналоговый сигнал, пропорг иональньет положению, усиливается, преобразует-. ся в цифровой код и подается в формирователь сигнала управления, в котором на основании этого сигнала и внешней информации о скорости, курсе и широте места формируется сигнал управления. Сигналы с младших , разрядов формирователя сигнала управ- ления поступают на входы первого i г цифроаналогового преобразователя и , с его выходов аналоговый сигнал пос- тупает на первый вход сумматора. Сигналы со знакового разряда и старших разрядов поступают на вход дешифратора, который в зависимости от величины этих сигналов подключает к питающим входам первого цифроаналогового преобразователя опорное , напряжение нужной величины. Сигналы со знакового разряда и старших раз- рядов формирователя инвертируются и поступают на информационные входы второго цифроаналогового преобразователя, который запитьшается от источника переменного напряжения. Выходной сигнал этого, преобразователя поступает на второй вход сумматора и с его выхода на вход мо ментного датчика. 2 ил. I (Л tVS Од CD СА
| Гироскопические системы | |||
| Под ред | |||
| Д.С.Пельпора, ч.Ш, М | |||
| : Высшая школа, 1980, с,41-46Гироскопические системы | |||
| Под ред | |||
| Д.С.Пельпора, ч.1, М.: Высшая школа, 1977,с.128-134. |
