(54) МЕХАНИЗМ УГЛОВОГО СКАНИРОВАНИЯ К УСТРОЙСТВУ ДЛЯ ОБМЕРА ФИГУРЫ ЧЕЛОВЕКА
1
Изобретение относится к оборудованию для объективного пространственного обмера фигуры человека.
Известен механизм углового сканирования к устройству для обмера фигуры человека, содержащий основание, на котором расположена каретка с.приводом вращения, с сигнальными метками и датчики положения каретки 1.
Недостатком известного устройства является низкая точность измерения.
Цель изобретения - повыщение точности измерения.
Эта цель достигается тем, что механизм углового сканирования к устройству для обмера фигуры человека, содержащий основание, на котором расположена каретка с приводом вращения, с сигнальными метками и датчики положения каретки, имеет источник света и фотоприемники, причем источник света расположен на каретке, а фотоприемники расположены на основании по окружности и ориентированы в сторону центра вращения.
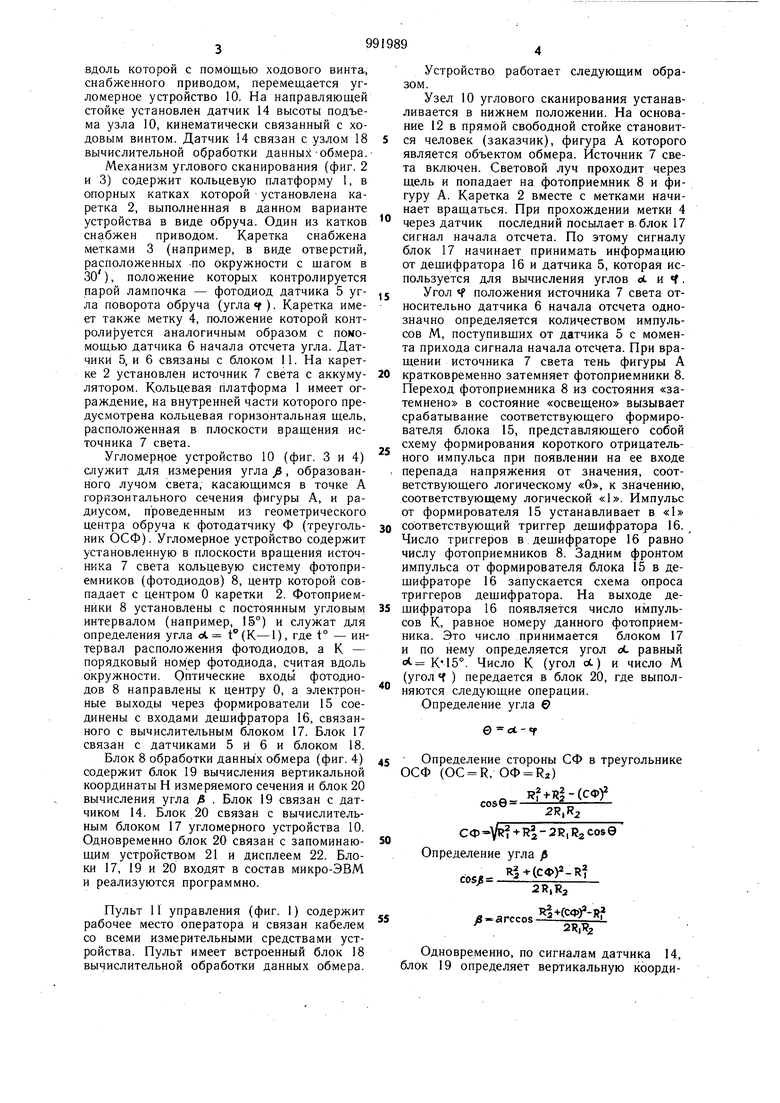
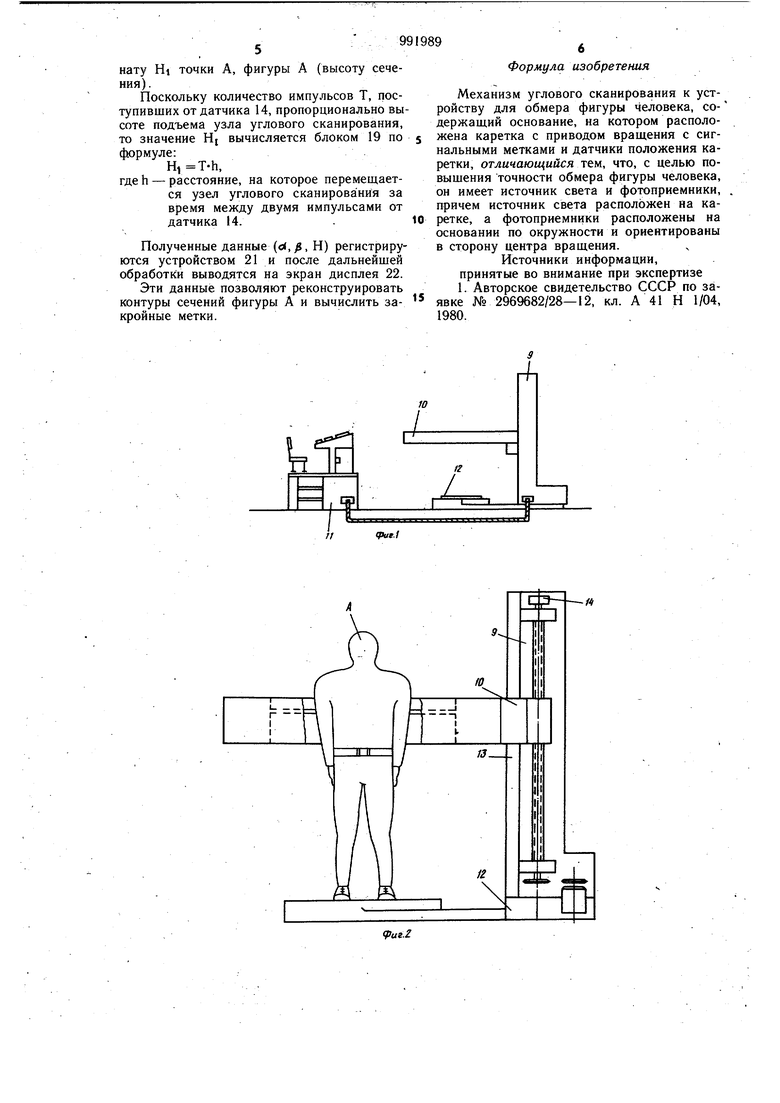
На фиг. 1 показано устройство, общий вид; на фиг. 2 - устройство измерения; на фиг. 3 - механизм углового сканирования;
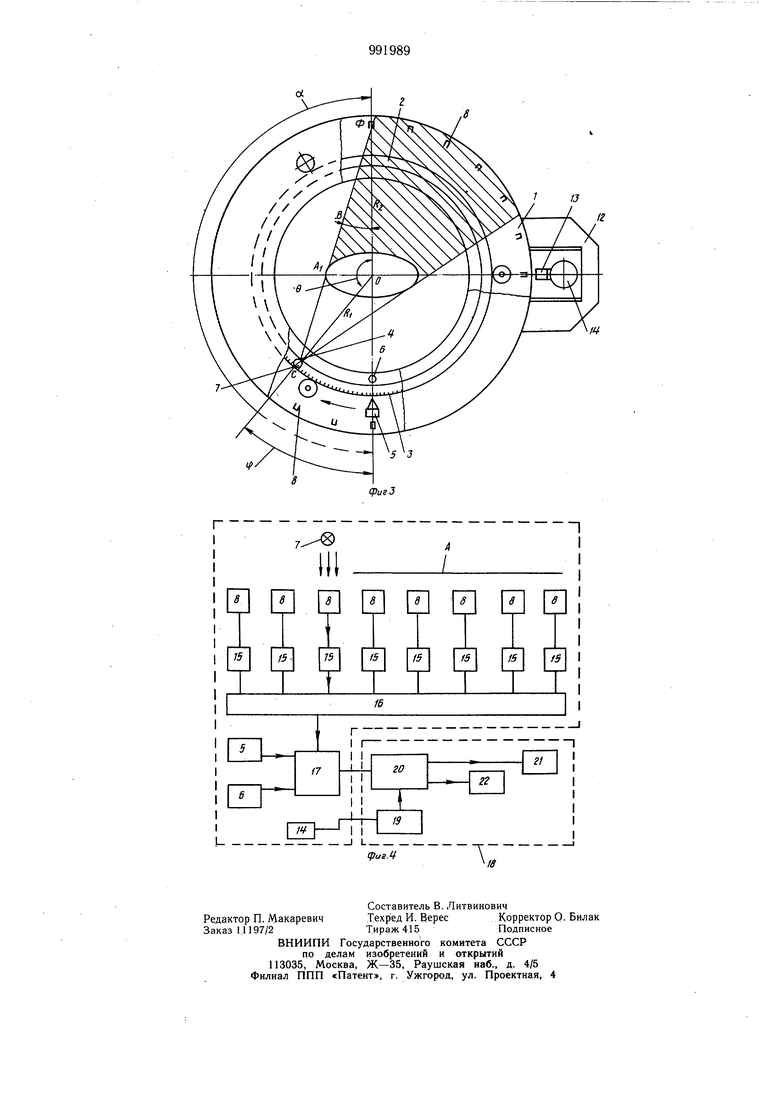
на фиг. 4 - функциональная схема устройства.
Механизм углового сканирования к устройству для обмера фигуры человека содержит основание 1, каретку 2 с приводом вращения и сигнальными метками 3 и 4, датчики 5 и 6 положения каретки, источник 7 света, фотоприемники 8, узел 9 вертикального сканирования, угломерное устройство 10, пульт 11 управления, основание 12, стойку 13, датчик 14 высоты, формировате10ли 15, дешифраторы 16, вычислительный блок 17, блок 18обработки данных обмера, блок 19 вычисления вертикальной координаTbi, блок 20 вычисления угла, запоминающее устройство 21, дисплей 22.
Устройство функционирует следующим
15 образом.
Для обмера фигуры человека устройство имеет закрепленный на основании 12 узел 9 вертикального сканирования с угломерным устройством 10, включающим меха20низм углового сканирования, и пульт управления.
Узел 9 вертикального сканирования (фиг. 1 и 2) содержит установленную на основании 12 направляющую стойку 13,
вдоль которой с помощью ходового винта, снабженного приводом, перемещается угломерное устройство 10, На направляющей стойке установлен датчик 14 высоты подъема узла 10, кинематически связанный с ходовым винтом. Датчик 14 связан с узлом 18 вычислительной обработки данных-обмера.
Механизм углового сканирования (фиг. 2 и 3) содержит кольцевую платформу 1, в опорных катках которой установлена каретка 2, выполненная в данном варианте устройства в виде обруча. Один из катков снабжен приводом. Каретка снабжена метками 3 (например, в виде отверстий, расположенных по окружности с щагом в 30), положение которых контролируется парой лампочка - фотодиод датчика 5 угла поворота обруча (угла ч). Каретка имеет также метку 4, положение которой контролируется аналогичным образом с помомощью датчика 6 начала отсчета угла. Датчики 5, и 6 связаны с блоком 11. На каретке 2 установлен источник 7 света с аккумулятором. Кольцевая платформа 1 имеет ограждение, на внутренней части которого предусмотрена кольцевая горизонтальная щель, расположенная в плоскости вращения источника 7 света.
Угломерное устройство 10 (фиг. 3 и 4) служит для измерения угла /, образованного лучом света, касающимся в точке А горизонтального сечения фигуры А, и радиусом, проведенным из геометрического центра обруча к фотодатчику Ф (треугольник ОСФ). Угломерное устройство содержит установленную в плоскости вращения источника 7 света кольцевую систему фотоприемников (фотодиодов) 8, центр которой совпадает с центром О каретки 2. Фотоприемники 8 установлены с постоянным угловым интервалом (например, 15°) и служат для определения угла Л t(K-1), где t° - интервал расположения фотодиодов, а К - порядковый номер фотодиода, считая вдоль окружности. Оптические входь фотодиодов 8 направлены к центру О, а электронные выходы через формирователи 15 соединены с входами дещифратора 16, связанного с вычислительным блоком 17. Блок 17 связан с датчиками 5 И 6 и блоком 18.
Блок 8 обработки данных обмера (фиг. 4) содержит блок 19 вычисления вертикальной координаты И измеряемого сечения и блок 20 вычисления угла Д . Блок 19 связан с датчиком 14. Блок 20 связан с вычислительным блоком 17 угломерного устройства 10. Одновременно блок 20 связан с запоминающим устройством 21 и дисплеем 22. Блоки 17, 19 и 20 входят в состав микро-ЭВМ и реализуются программно.
Пульт 11 управления (фиг. 1) содержит рабочее место оператора и связан кабелем со всеми измерительными средствами устройства. Пульт имеет встроенный блок 18 вычислительной обработки данных обмера.
Устройство работает следующим образом.
Узел 10 углового сканирования устанавливается в нижнем положении. На основание 12 в прямой свободной стойке становится человек (заказчик), фигура А которого является объектом обмера. Источник 7 света включен. Световой луч проходит через щель и попадает на фотоприемник 8 и фигуру А. Каретка 2 вместе с метками начинает вращаться. При прохождении метки 4
через датчик последний посылает в. блок 17 сигнал начала отсчета. По этому сигналу блок 17 начинает принимать информацию от дешифратора 16 и датчика 5, которая используется для вычисления углов ot и «Г.
Угол «f положения источника 7 света относительно датчика 6 начала отсчета однозначно определяется количеством импульсов М, поступивших от датчика 5 с момента прихода сигнала начала отсчета. При вращении источника 7 света тень фигуры А
кратковременно затемняет фотоприемники 8. Переход фотоприемника 8 из состояния «затемнено в состояние «освещено вызывает срабатывание соответствующего формирователя блока 15, представляющего собой схему формирования короткого отрицательного импульса при появлении на ее входе , перепада напряжения от значения, соответствующего логическому «О, к значению, соответствующему логической «1. Импульс от формирователя 15 устанавливает в «1
0 соответствующий триггер дешифратора 16. Число триггеров в дешифраторе 16 равно числу фотоприемников 8. Задним фронтом импульса от формирователя блока 15 в дещифраторе 16 запускается схема опроса триггеров дещифратора. На выходе де5 щифратора 16 появляется число импульсов К, равное номеру данного фотоприемника. Это число принимается блоком 17 и по нему определяется угол оС равный К15°. Число К (угол сК.) и число М (угол Ч ) передается в блок 20, где выполняются следующие операции. Определение угла Q
45 Определение стороны СФ в треугольнике ОСФ (OC R, ОФ К2)
(CФУ
С08в 2R,R2
CO VR +Ri-2R,R2Cose Определение угла ft
2R,R2
Я|-(СФУ-| Д
)8- arccos
2R,
Одновременно, по сигналам датчика 14, блок 19 определяет вертикальную координату HI точки А, фигуры А (высоту сечения). Поскольку количество импульсов Т, поступивших от датчика 14, пропорционально высоте подъема узла углового сканирования, то значение Hj вычисляется блоком 19 по формуле:. Н, T-h, где h - расстояние, на которое перемещается узел углового сканирования за время между двумя импульсами от датчика 14. Полученные данные (с,д, Н) регистрируются устройством 21 и после дальнейшей обработки выводятся на экран дисплея 22. Эти данные позволяют реконструировать контуры сечений фигуры А и вычислить закронные метки.
9 Формула изобретения Механизм углового сканирования к устройству для обмера фигуры человека, содержащий основание, на котором расположена каретка с приводом вращения с сигнальными метками и датчики положения каретки, отличающийся -v&vi, что, с целью повышения точности обмера фигуры человека, он имеет источник света и фотоприемники, причем источник света расположен на каретке, а фотоприемники расположены на основании по окружности и ориентированы в сторону центра вращения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке №2969682/28-12, кл. А 41 Н 1/04, 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обмера фигуры человека | 1979 |
|
SU784860A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| Устройство для обмера фигуры человека | 1980 |
|
SU936874A1 |
| Устройство для обмера объемных фигур | 1989 |
|
SU1621846A1 |
| Устройство для снятия портновской мерки | 1988 |
|
SU1607768A1 |
| Устройство для обмера фигурычЕлОВЕКА | 1978 |
|
SU812261A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОТСЧЕТНОГО КРУГА УГЛОМЕРНОГО ИНСТРУМЕНТА | 1992 |
|
RU2082087C1 |
| Устройство для обмера фигуры человека | 1988 |
|
SU1570703A1 |
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1104573A1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
а
ftepue.f
-«
fO
iZ
