Изобретение относится к легкой промышленности, в частности к швейной, и может быть использовано при бесконтактном измерении топографии поверхности объектов сложной формы, преимущественно фигуры человека, в частности для массовых антропометрических обследований населения и при изготовлении одежды по индивидуальным заказам, обеспечивающем повышение уровня автоматизации и точности индивидуального проектирования шаблонов одежды.
Известны различные системы объективного пространственного обмера фигуры человека или других тел сложной формы, отличающиеся степенью автоматизации данного процесса и принципами работы. Распространены контактные системы, в которых, например, данные о фигуре человека получают в виде функции или ее дискретных значений, заключающей в себе описание формы обмеряемой фигуры по угловому положению измерительной ленты в процессе ее качения по поверхности фигуры во время обмера (см., например, авторское свидетельство СССР 341465, кл. А 41 Н 1/04, 1969; авторское свидетельство СССР 508247, кл. А 41 Н 1/04, 1974; авторское свидетельство СССР 936874, кл. А 41 Н 1/04, 1980). При этом сечения или прямоугольные проекции фигуры человека восстанавливают по угловому отклонению измерительной ленты от направления радиус-вектора положения устройства подачи и приема измерительной ленты в пространстве, то есть от направления на центр кольцевой траектории движения лентопротяжного механизма. Замкнутая в кольцо измерительная лента выполняет функцию контактного элемента, прикатывающего легкую одежду и располагающегося по касательной к контуру сечения фигуры, что используется для измерений. Устройства, как правило, содержат узел углового сканирования (механизм обмера фигуры), электрически связанный с пультом управления и подвижно размещенный на вертикальной направляющей стойке, установленной на основании устройства, датчик положения и привод перемещения узла углового сканирования вдоль стойки с помощью механизма вертикального перемещения, и регистрирующие результаты измерений и вычислительные блоки, как, например, размещенные в пульте управления и соединенные между собой угломерный блок и блок обработки и выдачи информации (авторское свидетельство СССР 936874, кл. А 41 Н 1/04, 1980). В целом узел углового сканирования таких устройств представляет собой подвижно установленную для вертикального перемещения на стойке, ориентированную в горизонтальной плоскости кольцевую направляющую (круговое основание) с расположенными на ней подвижной кареткой с приводом вращения, подвижным датчиком углового отклонения измерительной ленты, кинематически связанным с лентой и выполненным в виде сигнальной планки, и с компенсатором натяжения измерительной ленты, посредством лентопротяжного механизма связанной с кареткой, а также отсекатели измерительной ленты и датчики положения каретки, выполненные в виде оптронных пар и размещенные на круговом основании с возможностью взаимодействия с сигнальной планкой. В процессе обмера человек остается неподвижным, в то время как лентопротяжный механизм равномерно движется по кольцевой направляющей вокруг фигуры человека, а последняя перемещается по вертикали и соответственно перемещается по вертикали плоскость расположения витка измерительной ленты, охватывающего объект. Таким образом, каретка с лентопротяжным механизмом описывает в пространстве винтовую линию вокруг объекта и, следовательно, выходная функция обмера поверхности содержит в себе описание винтового контура поверхности, измеренного в результате движения по поверхности фигуры единственной точки касания витка измерительной ленты со стороны сигнальной планки по винтовой линии, что усложняет и снижает точность алгоритма восстановления сечений (прямоугольных проекций) фигуры человека для дальнейших вычислений параметров фигуры с целью проектирования шаблонов одежды. Основным недостатком таких систем, кроме того, является низкая надежность в работе из-за большого числа подвижных, механически управляемых элементов устройств, участвующих в процессе обмера: это сама измерительная лента, подвижные натягивающие каретки, ограничители натяжения измерительной ленты, двигающиеся по соответствующим направляющим. Применение механических систем накладывает ограничения на продолжительность процесса обмера, что повышает вероятность погрешностей за счет подвижки объекта за длительное время измерения.
Общим недостатком систем контактного обмера фигуры человека является наличие погрешностей вследствие соприкосновения измерительных элементов с мягкими тканями поверхности тела человека, что снижает точность и скорость обмера, а также может вызвать неудобство и неприятные ощущения для измеряемого человека. Контактные методы также исключают возможность одновременного обмера более чем одного объекта, как, например, поверхность торса тела человека и рук или обеих ног, и ограничивают количество информации, получаемой об объекте. Это снижает общую информативность измерений и, как следствие, качественный уровень информационного обеспечения САПР одежды.
Бесконтактным способом изучают форму поверхности объемных тел при помощи устройств, излучающих электромагнитные световые или звуковые волны.
Известны бесконтактные стереофотограмметрические и автоматические телевизионные системы (обязательно включают съемочные камеры и воспроизводящий монитор) измерения поверхности тела человека, предлагающие аналоговое представление информации и требующие автоматического анализа изображений на ЭВМ для определения обхватных параметров тела (см., например, Петров С.В., Медведева Т.В. Метод проектирования цифровых моделей поверхностей манекенов фигур // Швейная промышленность. М., 1992. 5 и "Making measurements on a body" EP 0222498 А2, publ. 20.05.87, Bulletin 87/21). Первая технология основывается на методах короткобазисной фотограмметрии, которые позволяют проводить высокоточные множественные измерения координат трехмерных объектов по их разноракурсным изображениям. В основу данного способа изучения формы поверхности объекта положено изображение всей поверхности. Данные системы бесконтактного обмера характеризуются высокой точностью и скоростью измерений. Однако в них используются большие сложные оптические системы и массивы камер для измерений и предусматриваются особые требования к освещению и отражательной способности поверхности объекта, который необходимо измерить. Все это усложняет данные методы и устройства, создает неудобства в использовании, ограничивает возможности применения, значительно повышает стоимость систем, сложность и продолжительность алгоритмов автоматической обработки результатов измерений и, как следствие, нецелесообразность применения систем для малых партий измерений. Для обработки результатов обмера во многих случаях требуется работа устройства в системе со специализированными компьютерами.
Известны также системы оптического измерения топографии поверхности объектов сложной формы, как, например тела человека, путем блокирования или затенения источника когерентного света, отличающиеся по конструкции развертывающего устройства, траектории сканирующего луча, размеру и типу измеряемых объектов, типу фотоэлектронного преобразователя и способу фиксирования тени, оптической разрешающей способности. В основе метода топографического измерения формы и размеров поверхности объекта лежит измерение контура поверхности объекта в поперечных направлениях с определением горизонталей поверхности как поперечных сечений поверхности в виде замкнутых плоских кривых, в совокупности формирующих дискретный каркас - топографию поверхности измеряемого объекта. Горизонтали поверхности определяют как сечения измеряемого объекта, полученные в дискретных секущих горизонтальных плоскостях уровня.
Наиболее близким к предлагаемому изобретению по технической сущности являются бесконтактный способ и устройство для оптического измерения топографии поверхности объекта (см. "Устройство для оптического измерения топографических параметров поверхности объекта" // Изобретения стран мира 08/98 или "Optical method and apparatus for measuring surface topography of an object" US 5636030, publ. 3.06.1997, Int. Cl.6 G 01 B 11/10; G 02 B 26/08). Устройство предназначено для измерения полной поверхности больших непрозрачных объектов сложной формы, как, например тело человека, и его характеристики в трех измерениях. В соответствии с текстом описания и схемным решением устройство содержит источник узкого луча света - генератор когерентного излучения типа лазера с малым сечением светового пучка, излучающего световой пучок с очень острой направленностью, т.е. малой расходимостью световых лучей в пучке, установленный в неподвижном горизонтальном положении над измеряемым объектом в оптомеханическом блоке, вмещающем устройство углового поперечного сканирования пространства лучом. Устройство также содержит фоточувствительный приемник излучения источника в виде одиночного оптического датчика состояния светового луча, на котором фокусируется отраженное излучение типа фотодиода, установленного в неподвижном осевом положении над измеряемым объектом в оптомеханическом блоке и регистрирующего состояния светового луча при его блокировании объектом и вырабатывающего электрический сигнал согласно количеству излучения, падающего на датчик в различные моменты времени. В настоящем изобретении используются единственный оптический приемник, который регистрирует состояния светового луча, а именно блокируется ли световой луч объектом или нет. Источник узкого светового луча оптически связан с внешней оптической системой отклоняющих зеркал для управления направлением излучения, ориентируемым последовательно в вертикальном и горизонтальном направлении по сложенному оптическому пути с многозвенной геометрической конфигурацией в плоскость измерения устройства многоракурсного поперечного углового сканирования его внутреннего пространства лучом, которое содержит механически управляемые конструктивные элементы, а именно вращающийся горизонтально ориентированный кронштейн-основание, конструктивно радиально связывающий пару размещенных по краям, оптически связанных поворотных зеркал в форме призмы с угловым наклоном рабочих граней 45o, последовательно направляющих осевой луч горизонтально радиально во внешнюю сторону от центральной оси устройства на расстояние направляющей кронштейна, согласованного с радиусом кольцевого модуля, и радиальный луч - вертикально в положение слежения сканирующего многогранного зеркала, ведущее зубчатое колесо привода механической зубчатой передачи с внутренним зацеплением непрерывного вертикального движения кольцевого модуля, являющееся основанием для многогранного сканирующего зеркала, осуществляющее его вращение вокруг собственной оси и одновременно движение по окружности направляющей зубчатой передачи с внутреннем зацеплением, для углового сканирования в плоскости измерения кольца с внутренней поверхностью обратного отражения, выполненного в виде пирамиды с угловым наклоном граней 45o, одновременно совершающего собственное вращение и движение вокруг объекта по направляющей (орбите) кольцевого модуля с помощью привода и разворачивающего и направляющего следящий луч внутрь кольцевого модуля в горизонтальную плоскость сканирования, и связанное с ведомым зубчатым колесом внутреннего зацепления механической передачи и с внутренней поверхностью обратного отражения сканирующего луча назад вдоль траектории падения через светоделительное зеркало и линзу на оптический датчик. Кольцевой модуль, имеющий достаточный диаметр для охвата измеряемого объекта и выполненный с возможностью вертикального перемещения вдоль центральной вертикальной осевой линии с помощью привода, размещен в оптомеханическом блоке устройства в горизонтальном положении и включает кольцевое основание с кольцевой направляющей вращательного движения сканирующего оптического элемента - многогранного зеркала, выполненной в виде поверхности зубчатого колеса с внутренним зацеплением передачи механизма привода вращения зеркала вдоль направляющей, и ведущее несущее зубчатое колесо этого механизма с соосно размещенным сверху на его внешнем диаметре многогранным зеркалом. Вдоль внутренней поверхности кольцевого модуля размещается лента с поверхностью обратного отражения луча вдоль траектории его падения. А также в оптомеханическом блоке устройства размещены в удалении от объекта и положении по одну сторону измеряемого объекта над ним источник, генерирующий узкий световой луч, и оптический датчик, регистрирующий состояния светового луча в процессе измерения, и оптически связаны между собой посредством внешней оптической системы отклоняющих зеркал для управления направлением излучения источника с помощью динамичных оптических элементов, передающей на оптический датчик поток света, не блокированный объектом, т.е. возвращающийся отраженный от внутренней обратно отражательной поверхности кольцевого модуля оптической системы луч, включающей также неподвижно расположенные вдоль центральной вертикальной оси оптомеханического блока светоделительное зеркало и фокусирующую излучение на детектор линзу.
Принятый световой поток преобразуется в электрический сигнал. В целом все конструктивные компоненты и оптический элементы устройства ориентированы вдоль центральной вертикальной оси оптомеханического блока, проходящей через центр кольцевого модуля, линзу и направляющее луч светоделительное зеркало и оптический датчик излучения. Эта ось является одновременно осью механического вращения элементов кинематического механизма сканирования по направляющей кольцевого модуля вокруг объекта и направлением относительного вертикального перемещения кольцевого модуля и объекта.
При измерении объекта, топографию поверхности которого необходимо получить, устанавливают в вертикальном положении в целом в одну линию с центральной осью оптомеханического блока устройства. Источник света генерирует световой пучок с малой расходимостью лучей, который отражается ответвителем под прямым углом. Этот отраженный луч падает на первое зеркало вращающейся пары поворотных зеркал вдоль оси вращения этого зеркала. Первое вращающееся зеркало пары расположено под углом 45o, так что луч вновь отражается под прямым углом, тем самым создавая вращательный сканирующий луч, который непрерывно сплошь сканирует пространство в секторе угла 360o в горизонтальной плоскости, совершая непрерывное круговое сканирование. Данный вращательный сканирующий луч в свою очередь отражается под прямым углом вторым, радиально смещенным вдоль направляющей кронштейна зеркалом пары, совершающим вращение вокруг первого зеркала. При этом вращательный сканирующий луч преобразуется в луч, параллельно сканирующий в вертикальной плоскости по образующей цилиндрической поверхности. Далее этот цилиндрически сканирующий луч падает на многогранное зеркало, которое синхронно с этим лучом обращается вдоль кольцевого основания вокруг измеряемого объекта, и отражается многогранным зеркалом под прямым углом внутрь плоскости измерения, ограниченной им. Так как данное многогранное зеркало совершает собственное вращение по мере того, как оно движется вдоль кольцевого основания вокруг измеряемого объекта, поворотным сканирующим лучом многократно сканируют поперек объекта со всех его сторон.
Доли светового потока для каждой развертки луча в плоскости измерения, соответствующей завершенному циклу оборота грани зеркала вокруг своей оси, которые не блокируются измеряемым объектом, попадают на кольцевое основание с поверхностью обратного отражения, которое окружает объект. Обратно отражающее кольцевое основание возвращает сканирующий луч вдоль соответствующей траектории падения обратно на светоделительное зеркало. Возвращаемый световой луч проходит через светоделительное зеркало и фокусируется линзами на фотоприемнике. Принятый световой поток преобразуется в электрический сигнал. Оптический параметр (коэффициент поглощения), являющийся функцией положения сканирующего луча в кольцевом модуле, преобразуется в амплитуду электрического сигнала, изменяющуюся на выходе оптического датчика во времени при угловом сканировании пространства лучом. Непрерывный диапазон напряжения электрического сигнала, полученного от оптического датчика, является аналогом состояния излучения по данному ракурсу в кольцевом модуле. В процессе аналого-цифрового преобразования с помощью специальной платы ПЭВМ предварительно осуществляют замену непрерывного интервала значений электрического сигнала рядом дискретных значений при квантовании на два уровня. Таким образом, измеряя продолжительность тени, созданной объектом, во время каждого скана и связывая эту тень для каждого цикла с соответствующими местоположением на орбите (кольцевой траектории) и ориентацией собственного вращения многогранного зеркала, можно вычислить поперечное сечение объекта, лежащее в плоскости сканирующего луча. При этом кольцевой модуль перемещается относительно объекта в продольном вертикальном направлении с помощью электромеханического привода. По данному способу следующие один за другим поперечные сечения измеряются путем вертикального перемещения многогранного зеркала вместе с обратно отражающим кольцом вдоль объекта. Далее можно геометрически соединить последовательные поперечные сечения в единое целое для вычисления топографии всей поверхности объекта. Дальнейшая обработка результатов обмера также осуществляется на ПЭВМ.
В данном устройстве (прототипе) управление направлением излучения осуществляется использованием ряда нестационарных оптических элементов, в том числе движущегося по окружности сканирующего элемента (многогранное зеркало). Тем самым обеспечивается последовательное движение светового луча в плоскости поперек объекта и периодическое блокирование (прерывание) светового луча, направленного к объекту, в плоскости сканирования (поле развертки луча).
В основу данного способа изучения формы поверхности объекта положено получение теневых контуров поперечных сечений рельефной поверхности измеряемого объекта в горизонтальных плоскостях с последующим вычислением координат узловых точек сечений. Таким образом, получают графическое задание объемной формы поверхности измеряемого объекта в виде набора ее горизонтальных сечений плоскостями уровня с образованием каркаса поверхности. С помощью таких устройств получают топографию проекций контуров поперечных сечений поверхности объекта на плоскости, приведенных к единому центру - центру измерительной окружности.
При измерении поверхность облучают источником узкого луча света, при этом зеркало, вращаясь вокруг собственной оси и одновременно перемещаясь по окружности вокруг объекта, отражает луч поперек объекта и сканирует данным лучом при движении по окружности. Таким образом, выполняют многоракурсное угловое сканирование пространства в отраженном свете узким лучом в плоскости поперек объекта путем регистрации отраженного излучения источника, не блокированного объектом. Датчик регистрирует отраженное излучение и вырабатывает электрический сигнал, соответствующий количеству излучения, заблокированного объектом. Предложенный способ сканирования не требует перемещения источника вокруг объекта. Таким образом, по данному способу измерение топографии поверхности объекта осуществляется многократным измерением продолжительности тени на детекторе в результате блокирования источника излучения измеряемым объектом для каждой развертки луча за время полного оборота направляющей лазерный луч оптической системы зеркал вокруг объекта в процессе измерения и определением границ тени для соответствующих ракурсов (направлений) излучения и положений многогранного зеркала обращающейся оптической системы зеркал на орбите по моментам времени начала и конца тени от объекта на детекторе. По результатам измерений тени вычисляют касательные к контуру сечений поверхности, связывая соответствующие орбитальную позицию и собственную вращательную ориентацию многогранного зеркала, и вычисляют поперечное сечение поверхности объекта. Таким образом, согласно прототипу горизонтальные сечения поверхности тела человека определяют по касательным к поверхности, соответствующим полученным границам тени объекта в секторе развертки для каждого ракурса обзора лучом, измеренным в различные моменты времени обмера фигуры человека. Объект в процессе измерения остается неподвижным, а пара зеркал и многогранное зеркало обращаются вокруг него, одновременно совершая перемещение вдоль вертикальной оси.
Устройство и способ позволяют произвести определение координат полной поверхности тела человека путем расчета по касательным к контуру сечений поверхности тела человека. Касательные могут быть составлены в контур для вычисления горизонтального сечения, лежащего в плоскости поля разверток (секторов разверток), охватываемого сканирующим лучом (прототип).
Устройство и способ для оптического измерения топографических параметров поверхности объекта (прототип) обладает рядом известных преимуществ, однако в некоторых его аспектах может быть улучшен для достижения наилучшего результата измерений. В связи с этим основным недостатком прототипа является описанная необходимость использования механических элементов привода узла углового сканирования лучом в плоскости измерения горизонтального сечения и механических управляемых конструктивных элементов, включающих ряд нестационарных оптических элементов, в том числе движущийся по окружности сканирующий оптический элемент (многогранное зеркало), для управления направления света в сочетании с точной оптикой измерительной системы, что ограничивает время проведения измерений и снижает надежность системы в работе. Наличие движущихся и вращающихся несущих конструкций для линз и зеркал достаточно сложной оптомеханической системы требует точной динамической балансировки и синхронизации работы ее элементов и при этом не только понижает надежность устройства, но и значительно усложняет его. Применяемый принцип развертки луча предусматривает высокую скорость вращения зеркала, что при жестких требованиях к точности изготовления механических узлов повышает стоимость системы и снижает экономичность и эффективность ее использования для малых партий измерений, что характерно при текущих антропометрических обмерах.
Характерно, что при данной реализации способа измерения полной топографии поверхности объекта по мере того, как многогранное зеркало обращается по круговой направляющей кольцевого модуля вокруг объекта в процессе его поперечного углового сканирования, плоскость траектории непрерывно равномерно перемещается по вертикали. Таким образом зеркало описывает в пространстве винтовую линию с радиусом R и некоторым шагом по вертикали ε, соответственно совершает винтовое движение луч, касательный к поверхности прямой с каждой ее стороны с началом в точках цилиндрической винтовой линии и направленный внутрь к объекту, перпендикулярно вертикальной оси. Это характеризует поперечное измерение винтового контура поверхности за каждый полный оборот многогранного зеркала вокруг объекта, соответствующий измерению одного сечения. Плоская реконструкция сечения поверхности при данной реализации способа получения топографии будет соответствовать некоторому малому слою поверхности и являться очерком его горизонтальной проекции на плоскости начального элементарного уровня данного слоя, включающего первую полученную в сечении касательную. Очерк проекции данного слоя с винтовым контуром на поверхности, измеренным в слое за время обмера данного сечения, будет представлен ломаным контуром в плоскости реконструкции. Точность приближения измеренного контура его проекцией (реконструкцией) по параметрам винтовой линии определяется приращением соответствующих длин рассматриваемых контуров и зависит от времени углового сканирования лучом в плоскости измерения. При достижении высокой скорости измерений в горизонтальных направлениях очерк горизонтальной проекции некоторого слоя h данной поверхности будет точно соответствовать истинному контуру горизонтального сечения поверхности на начальном элементарном уровне данного слоя. В данной реализации способа время углового сканирования определяется параметрами механической связи конструктивных элементов управления сканированием в кольцевом модуле узла углового сканирования. Скорость углового вращения сканирующих оптических элементов, а именно многогранного зеркала и пары установленных на радиальном кронштейне поворотных зеркал оптической системы управления направлением луча, ограничена также конечной массой зеркал и конструктивных элементов их размещения и жесткими требованиями согласования их взаимодействия при измерении и равномерности вращения. Таким образом, точность измерений контуров сечений в системе ограничена рядом перечисленных параметров и собранные в системе данные для каждого сечения требуют приведения результатов к стандартным горизонтам при определении контура горизонтального сечения, т.е. горизонтальным плоскостям с фиксированными при измерении уровнями, что создает также дополнительные погрешности измерения, поскольку при этом определяют контур горизонтального сечения поверхности, аппроксимированный по ближайшим касательным, полученным в различные моменты времени и соответствующим различным уровням измерений по вертикали. Необходимость точного выполнения вышеперечисленных требований согласования работы, а также точного соответствия формы выполнения оптических зеркал установленным параметрам устройства снижает надежность системы в работе и усложняет устройство. Использование лазерных источников света, обладающих высокой стоимостью, и опасность их влияния на человека также является существенным недостатком данной системы при проведении измерений поверхностей живых объектов.
В соответствии с текстом описания прототипа высокая точность измерений сечений по параметрам винтовой линии обхода источником вокруг объекта, т.е. винтовой траектории оптического компонента управления световым лучом, может быть достигнута также при пошаговом последовательном по вертикали измерении сечений. Однако измерение топографии таким путем сопровождается потерями во времени измерения всей поверхности и требует точного позиционирования кольцевого модуля при пошаговом управлении его вертикальным перемещением, что может снизить надежность измерений и усложняет устройство. Поэтому более предпочтительным, эффективным во времени является управление измерением топографии поверхности при непрерывном по вертикали скользящем способе послойного измерения сечений поверхности объекта, хотя и требует точного согласования работы привода вертикального перемещения кольцевого модуля и вращательного движения оптических компонентов управления световым лучом.
Кроме того, использование при измерениях по данному способу светового пучка с очень острой направленностью, т.е. малой расходимостью световых лучей в пучке, для определения оптических и соответствующих геометрических границ тени поверхности фигуры человека по многим ракурсам, требует преобразования узкого пучка в поворотный сканирующий луч, совершающий сложное перемещение в пространстве, и обхода данным лучом вокруг объекта при одновременном угловом сканировании лучом пространства в плоскости окружности, охватывающей объект. Способ оптического измерения топографии поверхности объекта характеризуется тем, что каждую пару линий, касательных противолежащим сторонам объекта, определенных в заданном направлении сканирования, получают из элемента дуги окружности, который успевает пройти вращающееся зеркало за каждое изменение светового сканирующего луча между его последовательными состояниями блокирования и разблокирования объектом.
При этом определение характерных касательных положений светового луча от противолежащих сторон поверхности объекта, по которым восстанавливают контур измеренного сечения, осуществляют из элементов дуги окружности, что физически ограничивает количество ракурсов измерения диаметров сечения, соответствующее числу полученных элементов дуги и определенное компоновкой устройства. Причем с каждой позиции луча на окружности может быть определена граница тени только с одной стороны поверхности и получена лишь одна касательная. Это в два раза сокращает информативность измерений, количественно выражаемую числом линейных элементов, составляющих приближающий ломаный контур реконструкции измеренного сечения поверхности, характеризует недостаточно эффективное использование пространства кадра - поля реконструкции, ограниченного окружностью, что снижает точность отсчета. А также снижает точность приближения измеренного контура поверхности его плоской реконструкцией по параметру длины звеньев ломаной кривой.
Распределение положений касательных лучей на окружности в пределах каждого элемента дуги, определяющего ракурс углового сканирования и измерения диаметра сечения, для каждого сечения имеет непостоянный (случайный) характер и определяется путем предварительного анализа электрических сигналов регистрирующего излучение оптического датчика и сенсора положения плоскости измерения. По тем же причинам данные, полученные для обеих сторон поверхности не могут быть совокупно использованы для получения реконструкции, в том числе, в режиме реального времени измерения. В целом, это усложняет обработку данных и расчет реконструкции контура сечения, увеличивая продолжительность процесса измерений.
Задачей изобретения является повышение технологичности автоматизированного измерения поверхности фигуры человека при одновременном повышении точности за счет сокращения времени измерения путем уменьшения времени анализа и обработки данных, повышения информативности и надежности измерений за счет одновременного измерения противолежащих боковых сторон контура поверхности объекта в сечениях.
Указанная задача решена за счет того, что в устройстве бесконтактного измерения топографии поверхности объекта, содержащем кольцевой модуль поперечного многоракурсного непрерывного углового сканирования его внутреннего пространства световым лучом в горизонтальной плоскости, включающий кольцевое основание, оптический компонент управления световым лучом и изменением ракурса сканирования вдоль его внутренней поверхности с оптически связанными между собой излучателем и оптическим приемником, и датчик начала измерения сечения объекта с возможностью регистрации вертикального положения кольцевого модуля относительно объекта, выполненный с возможностью вертикального перемещения при помощи привода вдоль центральной вертикальной осевой линии объекта измерения, проходящей через центр кольцевого основания, электрически связанный с управляющей и регистрирующей персональной электронно-вычислительной машиной, включающей систему цифровой обработки информации, кольцевой модуль, кроме того, включает стационарные оптические компоненты управления световым лучом, образующие группу излучателя, состоящую из широкоугольных, облучающих внутреннее пространство кольцевого модуля источников светового излучения с длиной волны за пределами видимого диапазона света, выполненных с возможностью их последовательного подключения к источнику питания, и группу оптического приемника, состоящую из широкоугольных фотоприемников, согласованных по частоте излучения источников, с прямой оптической связью между ними, жестко установленных на кольцевом основании со стороны его внутренней части и размещенных на одном высотном уровне кольцевого основания в горизонтальной плоскости по дуге окружности его внутренней поверхности с равным малым угловым шагом Δϕ и Δϕ/2 отстояния оптических компонентов друг от друга соответственно в группе излучателя и группе оптического приемника, и с заданным угловым шагом смещения Δϕ/4 оптических компонентов одной из групп относительно другой так, что компоненты группы излучателя внутренним образом делят дуговой отрезок между каждой соседней парой фотоприемников и скомпонованы так, что каждому источнику группы излучателя в направлении его излучения на центр кольцевого основания ставится в соответствие группа фотоприемников оптического приемника, вмещаемая дугой окружности кольцевого основания определяемой углом обзора источника, на противоположной от источника стороне, при этом группа излучателей и группа оптических приемников параллельно электрически связаны с ключевыми электронными устройствами блока электронного управления излучением и регистрации границ тени объекта, соответственно оптические компоненты группы излучателя - с коммутатором источников, а оптические компоненты группы оптического приемника - с коммутатором фотоприемников, электрически соединенным с пороговым устройством - компаратором, а ключевые электронные устройства электронного управления излучением и регистрации границ тени объекта, которые параллельно электрически связаны с управляющей и регистрирующей персональной электронно-вычислительной машиной, причем электрическая связь с персональной электронно-вычислительной машиной коммутатора источников и коммутатора фотоприемников осуществляется через соответствующие регистры адресов источников и фотоприемников, а персональная электронно-вычислительная машина параллельно электрически связана с пультом управления, связанным электрически с электродвигателем, и контактным датчиком начала измерения сечения объекта электрического блока управления устройством.
Причем устройство, кроме того, содержит жестко связанную с кольцевым модулем и блоком электронного управления излучением и регистрации границ тени объекта каретку с электромеханическим приводом ее перемещения вдоль цилиндрической вертикальной направляющей стойки, состоящим из механизма вертикального перемещения каретки внутри вертикальной цилиндрической направляющей стойки вдоль ходового винта, приводимого в движение механической зубчатой передачей, связанной с электродвигателем, при этом на корпусе установлен электрический блок управления устройством, содержащий электрический пульт управления и контактный датчик начала измерения сечения объекта, взаимодействующий посредством его контактной пары с механической зубчатой передачей электромеханического привода и электрически связанный со счетчиком уровней положения каретки с кольцевым модулем на вертикали, реализованным в блоке регистрации на персональной электронно-вычислительной машине, включающей вычислительный и управляющий блоки системы цифровой обработки информации.
Указанная задача также решена за счет того, что в способе бесконтактного измерения топографии поверхности объекта, заключающемся в том, что последовательно скользяще послойно измеряют вдоль продольной вертикальной оси объекта контуры поперечных сечений его поверхности путем непрерывного облучения движущимся в горизонтальной плоскости световым лучом области измерения, занимаемой объектом, из точки положения источника, движущейся по охватывающей объект окружности, при непрерывном изменении вертикального положения этой плоскости, принимают в движущейся точке положения приемника той же окружности лучи, падающие на незатененные объектом участки противоположной дуги окружности, определяют границы начала и конца тени объекта по последовательным изменениям состояний незатенения и затенения светового луча объектом путем выделения из преобразованного электрического сигнала приемника нулевого сигнала, определяют по выделенным границам тени положение касательного к поверхности объекта луча из соответствующей точки положения источника в плоскости окружности с соответствующим вертикальным положением, определяют после полного оборота точки облучения по окружности вокруг измеряемого объекта в заданном направлении последовательно в плоскости окружности горизонтального уровня начала измерения сечения координат узловых точек пересечения касательных, соответствующих правым и левым границам тени объекта, определяют измеряемый контур поперечного сечения объекта путем интерполяции сглаживания геометрического места точек пересечения касательных к объекту, полученного для интервала высот за время полного оборота точки облучения, повторяют указанную последовательность действий на следующих друг за другом горизонтальных уровнях измерений сечений объекта при изменении относительного положения в продольном вертикальном направлении источника облучения на окружности и объекта, и вычисляют полную топографию поверхности объекта путем геометрической реконструкции поверхности по последовательности измеренных непрерывно следующих друг за другом поперечных сечений поверхности объекта, вдоль его продольной вертикальной оси, для каждой фиксированной точки положения источника облучения на окружности определяют одновременно в одной горизонтальной плоскости положение двух касательных лучей слева и справа к поверхности объекта, охватывающих контур поперечного сечения объекта с двух противолежащих сторон поверхности, путем последовательного облучения области измерения объекта группой дискретно размещенных в заданных точках окружности источников, излучающих расходящиеся веерные пучки лучей с угловой шириной, превышающей угловые поперечные размеры объекта, принимают затененные и не затененные объектом лучи группой приемников, размещенных в заданных точках той же окружности, соответствующих противоположной источнику дуге окружности за объектом, определяют координаты концов дуги тени объекта на окружности путем измерения преобразованных сигналов приемников и выделяют из них группы с нулевым сигналом, определяют положения обоих касательных лучей к поверхности объекта по заданным координатам положения источника и приемников на окружности, соответствующих концам дуги тени объекта для выделенной группы, и повторяют указанную последовательность действий для каждой точки положения источника, причем после облучения объекта последним из группы источников последовательно для каждой пары соседних точек положения источников на окружности в ее плоскости определяют координаты узловых точек пересечения касательных, собранных для всех точек последовательных положений источников на окружности, по геометрическому месту которых определяют контур горизонтального сечения поверхности объекта и, последовательно повторяя измерения контуров горизонтальных сечений поверхности на следующих друг за другом с заданным шагом, регистрируемым чувствительным датчиком, горизонтальных уровнях измерений, вычисляют топографию поверхности объекта путем геометрической реконструкции поверхности вдоль продольной вертикальной оси объекта по последовательности измеренных по шагам дискретных горизонтальных поперечных сечений поверхности объекта, образующей ее дискретный линейный каркас.
Причем геометрическое место точек пересечения, касательных к объекту, собранных для всех точек последовательных положений источников облучения объекта на окружности, определяют одновременно по правым и левым концам дуги тени объекта в режиме реального времени измерения каждого горизонтального сечения поверхности объекта путем последовательного пересечения касательных с ближайшим угловым положением в окружности, вычисленным по координатам соответствующих точек положения источников и приемников на окружности, при обходе вокруг объекта в заданном направлении.
Причем форму измеряемого контура геометрического сечения объекта определяют с учетом высоты каждого контура горизонтального сечения над плоскостью нулевого уровня отсчета измерений сечений тем, что в начале измерения первого сечения топографии поверхности объекта дополнительно измеряют по шкале расстояние от опорной плоскости нулевого уровня отсчета до уровня начала измерений сечений - первого горизонтального уровня измерения топографии поверхности объекта и определяют абсолютные значения высоты точек измеренных контуров сечений поверхности по формуле:
HSv=h0+v•h,
где S - номер луча, вмещающего точку, (S=1, N);
М - количество лучей, соответствующее количеству приемников на окружности;
v - номер измеренного горизонтального сечения поверхности, (v=1, К);
К - количество измеренных горизонтальных сечений поверхности;
h0 - высота первого горизонтального уровня измерения топографии поверхности объекта над плоскостью нулевого уровня отсчета измерений сечений;
h - шаг смещения плоскости уровня измерения сечения по вертикали.
Поставленная задача решена за счет того, что источники светового излучения выполнены в виде светодиодов, фотоприемники - в виде фотодиодов.
Сущность устройства для осуществления способа бесконтактного измерения топографии поверхности объекта, преимущественно фигуры человека, поясняется фиг. 1-4.
На фиг.1 и 2 схематически представлено устройство, реализующее способ, в двух проекциях. Фиг.2 раскрывает также схему кольцевого модуля поперечного многоракурсного облучения пучком световых лучей поверхности объекта в плоскости, реализующую способ, и иллюстрирует характерные положения луча в плоскости облучения для одного ракурса измерения.
На фиг.3 дополнительно изображено устройство, общий вид в аксонометрии.
На фиг.4 приведена блок-схема управления устройства.
Сущность способа поясняется фиг. 5-9.
На фиг.5 показана схема геометрии сбора данных.
На фиг.6-8 представлена схема расчета координат поверхности:
Фиг. 6 представлена для разъяснения определения положения оптических компонентов кольцевого модуля поперечного многоракурсного облучения его внутреннего пространства пучком световых лучей в координатной системе Оху устройства (схема координатного представления элементов);
Фиг.7 иллюстрирует способ определения узловых точек сечения и начало реконструкции сечений по проекционным данным.
Фиг. 8 иллюстрирует геометрическое представление горизонтального сечения фигуры человека (законченная реконструкция сечения) в соответствии с матрицей результатов обмера сечения фигуры человека в плоскости уровня Н.
Экспериментальное доказательство достижения цели представлено на фиг.9, 10.
Устройство (фиг. 1) состоит из основания в виде корпуса 1, на верхней платформе которого с внешней стороны закреплена цилиндрическая направляющая стойка 2, камера которой имеет узкий ограничительный продольный паз 3 для обеспечения вертикального перемещения внутри стойки 2 несущей каретки 4 вместе с кольцевым модулем 5 поперечного многоракурсного облучения его внутреннего пространства пучком световых лучей D (фиг.2) в горизонтальной плоскости уровня Н. Каретка 4 приводится в движение вверх или вниз вдоль направляющей стойки 2 соответственно в направлении стрелки А или А' с помощью электромеханического привода, который состоит из установленного на корпусе 1 механизма вертикального перемещения каретки 4 внутри вертикальной цилиндрической направляющей стойки 2 вдоль его ходового винта 6, приводимого во вращательное движение механической зубчатой передачей 7 внешнего зацепления и соединенного с ней во внутреннем пространстве корпуса 1 со стороны его нижней части, и электродвигателя 8, связанного с этой передачей 7. Причем поверхность внешней верхней платформы корпуса 1 служит плоскостью нулевого уровня измерений абсолютных значений отсчетов высоты Н положений кольцевого модуля 5 поперечного многоракурсного облучения его внутреннего пространства пучком световых лучей D в горизонтальной плоскости по вертикали, задающих последовательные уровни горизонталей топографии поверхности объекта на вертикали OO' в координатной системе устройства. На корпусе 1, кроме того, установлен электрический блок управления устройством, содержащий электрический пульт управления 9 с блоком питания, снабженный клавишами 10, 11 и 12 включения, обмера и реверса соответственно, и чувствительный контактный датчик начала измерения сечения объекта - микровыключатель 13, включаемый штифтом 14 его контактной пары, установленным радиально на внешнем диаметре со стороны нижней части на ведомой шестерне 15 механической передачи 7, закрепленной на ходовом винте 6 и связанной с электродвигателем 8 посредством ведущей шестерни 16. При каждом обороте ходового винта 6 штифт 14 замыкает контакты микровыключателя 13, формирующего управляющий электрический импульс запуска L (фиг.4) для начала измерения сечения объекта на каждом горизонте Н.
Каретка 4, кроме того, конструктивно жестко связана с кольцевым модулем 5 поперечного многоракурсного облучения пучком световых лучей, ориентированным в горизонтальном направлении и содержащем кольцевое основание 17 и стационарные независимые оптические компоненты 18, 19 управления световым лучом, жестко установленные на кольцевом основании 17 со стороны его внутренней части и образующие соответственно группу излучателя, состоящую из широкоугольных, облучающих внутреннее пространство кольцевого модуля источников светового излучения 18, типа светодиодов с длиной волны за пределами видимого диапазона света, выполненного с возможностью их последовательного подключения к источнику питания, и группу оптического приемника, состоящую из широкоугольных фотоприемников 19, типа фотодиодов, согласованных по частоте излучения источников 18, с прямой оптической связью между ними, и размещенные на одном высотном уровне кольцевого основания 17 в горизонтальной плоскости по дуге окружности его внутренней поверхности с равным угловым шагом Δϕ и Δϕ/2 (фиг.6) отстояния оптических компонентов друг от друга соответственно в группе излучателя и оптического приемника и с заданным угловым шагом смещения Δϕ/4 оптических компонентов одной из групп относительно другой так, что компоненты группы излучателя внутренним образом делят дуговой отрезок между каждой смежной парой фотоприемников 19 и компонуются при измерении так, что каждому источнику 18-Иi (фиг.2) группы излучателя в направлении его излучения на центр О кольцевого основания 17 ставится в соответствие группа фотоприемников 19 оптического приемника, вмещаемая дугой ∪ = ФuФu+α окружности кольцевого основания, определяемой углом α обзора источника 18, на противоположной от источника стороне окружности. Излучатель и оптический приемник могут состоять, например, соответственно из широкоугольных источников светового излучения в инфракрасной области спектра, типа светодиодов, и с сектором излучения не менее α = 60° на уровне 0,5, и согласованных по частоте излучения светодиода широкоугольных фотоприемников, типа фотодиодов, чувствительных в инфракрасной области спектра. Каретка 4 обеспечивает возможность перемещения кольцевого модуля 5 поперечного многоракурсного облучения пучком световых лучей вдоль центральной вертикальной осевой линии объекта измерения, проходящей через центр О его кольцевого основания.
Кроме того, на каретке 4 установлен блок электронного управления излучением и регистрации границ тени объекта 20, коммутирующий сигналы включения соответствующих источников излучения 18 и фотоприемников 19 со стороны управляющей и регистрирующей персональной электронно-вычислительной машины (ПЭВМ) 21, а также регистрирующий и передающий сигнал состояния излучения от опрашиваемых фотоприемников 19 (есть свет - нет света) в регистры памяти ПЭВМ 21. Блок 20 электронного управления излучением и регистрации границ тени объекта, выполняет функции безынерционного управления переключением источников 18, регистрации излучения фотоприемниками 19 и аналого-цифрового преобразования электрических сигналов L2 фотоприемников и сбора данных в системе с управляющей и регистрирующей ПЭВМ 21 (фиг.4). Каретка 4 с кольцевым модулем 5 поперечного многоракурсного облучения пучком световых лучей через продольный паз 3 цилиндрической стойки 2 жестко связана с расположенным снаружи кольцом кольцевого модуля 17 и расположенным с противоположной стороны от кольца блоком электронного устройства управления и регистрации 20, а внутри цилиндра направляющей стойки 2 связана с возможностью вертикального перемещения с ходовым винтом 6 и цилиндрической направляющей стойкой 2.
Источники излучения 18 и фотоприемники 19 параллельно электрически соединены (фиг.1, 4) соответственно с коммутаторами источников излучения 22 и коммутаторами фотоприемников 23, подключенными соответственно к регистрам адресов источников излучения 24 и фотоприемников 25. Выходы коммутатора фотоприемников 23 подключены к пороговому устройству - компаратору 26, а входы регистров адресов источников излучения 24 и фотоприемников 25 и выход компаратора 26 подключены к управляющей и регистрирующей ПЭВМ 21.
Вход управляющей и регистрирующей ПЭВМ 21 параллельно электрически соединен с электрическим пультом 9 управления устройством с блоком питания и контактным датчиком начала измерения сечения - микро выключателем 13, и, кроме того, с клавиатурой 27 для управления ПЭВМ 21 оператором. Выход ПЭВМ, кроме того, соединен с устройством вывода результатов измерений поверхности на мониторе 28. Электрический пульт управления 9 устройства электрически связан с электродвигателем 8.
В процессе измерения сечений поверхности объекта 29 каждый оптический компонент системы излучателя Иi (i=(0,М-1) (фиг.2) и соответствующая ему группа регистрирующих состояния светового луча D компонентов Фj(j=(0,N-1), (фиг.5) оптического приемника, расположенные в пространстве по разные стороны объекта, занимают последовательно ряд фиксированных в положений в окружности, охватывающей объект, определяя ракурсы ИiO измерения сквозных диаметров DIM сечений 29 поверхности объекта, и формируя плоских параллельный платформе корпуса 1 веерный пучок лучей Dj от источника излучения к регистрирующей группе оптических компонентов, вмещаемых дугой опроса фотоприемников ∪ = Ф
Устройство взаимодействует с компьютером через стандартный аппаратный интерфейс ПЭВМ 21 - LPT-порт, которые входят в состав устройства (на схеме не показаны). Связь устройства с компьютером выполнена известным образом. Регистрирующая и вычислительная функции устройства по получению и первичной обработке информации (результатов обмера) реализуется в системе с ПЭВМ с помощью управляющей программы ПЭВМ 21 в управляющем блоке 30 цифровой регистрации системы цифровой обработки полученных данных соответственно на ПЭВМ 21. Определение границ тени объекта, геометрическая реконструкция сечений 29 и полной топографии поверхности измеряемого объекта 29 и выдача числовой и графической информации об объекте реализуется в вычислительном блоке 31 системы цифровой обработки информации на ПЭВМ 21. Вычислительный блок системы цифровой обработки и выдачи информации 31 (фиг.4) ПЭВМ выполняет функции визуаилзации данных, т. е. проектирования и генерации изображений на устройствах отображения, преимущественно на экране дисплея 28, на основе исходных цифровых данных и правил и алгоритмов их преобразования, а также обеспечивает вывод визуальной графической и числовой информации на машиночитаемый носитель 32 или в среду трехмерной системы автоматизированного проектирования одежды 3D САПРО.
Устройство работает следующим образом.
Человек, фигуру 29 которого необходимо измерить, устанавливается в основной антропометрической стойке, в продольном вертикальном положении внутри ограничивающего область измерения кольцевого основания 17 кольцевого модуля 5 поперечного многоракурсного облучения пучком световых лучей D в горизонтальной плоскости уровня Н, преимущественно в его центре вдоль центральной вертикальной осевой линии. Основные измерения выполняют в плоскости кольцевого основания 17 в горизонтальном, поперечном по отношению к измеряемому объекту, направлении, перпендикулярно центральной вертикальной оси устройства OO', ориентированной вдоль объекта при измерениях. Область измерений задана окружностью радиуса R кольцевого основания 17 (фиг.2).
Нажатием на пульте 9 (фиг.4) клавиши 10 включается питание Uп электронных устройств блока 20 управления излучением и регистрами границ тени объекта. С клавиатуры 27 ПЭВМ 21 запускается программа управления устройством управляющего блока 30 цифровой регистрации и ПЭВМ 21 входит в режим ожидания управляющего электрического импульса L запуска начала измерения сечения с микро выключателя 13.
Нажатием клавиши 11 пуска включается электродвигатель 8, который через ведущую шестерню 16 приводит в движение ходовой винт 6. При вращении ведомой шестерни 15 штифт 14 замыкает микро выключатель 13, формируя управляющий электрический импульс L запуска начала измерения первого горизонтального сечения, которым начинает выполняться программа ПЭВМ 21 управления обмером фигуры человека 29 управляющего блока 30 цифровой регистрации, регистрирующая импульс L и формирующая его первый отчет v. В соответствии с программой управления управляющего блока 30 цифровой регистрации на начальном этапе сигналом L1 ПЭВМ 21 с LPT-порта компьютера в регистр адреса источников излучения 24 записывается номер первого установленного на кольцевом основании 17 (в последовательности оптических компонентов кольцевого модуля 5 по стрелке В-И0 (фиг.2)) светодиода 18, регистр адреса источников излучения 24 через соответствующий коммутатор 22 подключает светодиод 18 к напряжению питания Uп. Следом за установкой адреса источника И0 ПЭВМ 21 таким же образом выставляет в регистр адреса фотоприемников 25 первый номер фотоприемника 19 соответствующей источнику Ио группы фотоприемников дуги опроса (в последовательности оптических компонентов кольцевого модуля 5 по стрелке С-Фo i (фиг. 2)), то есть соответствующий первой позиции фотоприемника на противоположной от источника дуге полуокружности кольцевого основания 17 при обходе по стрелке С и рассчитываемый по формуле, согласно иллюстрирующей способ схеме размещения оптических компонентов (фиг.6), который через коммутатор приемников 23 подключает установленный фотоприемник Фo i к пороговому устройству - компаратору 26. Порог срабатывания компаратора устанавливается с превышением фонового уровня инфракрасного излучения помещения, в котором проводят измерения, при отсутствии излучения светодиодов. При приеме фотоприемником излучения светодиода на выходе компаратора 26 формируется потенциал +5В, равный логической единице ПЭВМ 21, при отсутствии сигнала на выходе компаратора 26 формируется логический ноль. Оптический параметр излучения источника 18 (коэффициент поглощения), являющийся функцией положения луча D в горизонтальной плоскости кольцевого модуля 17, преобразуется в амплитуду электрического сигнала фотоприемника 19, регистрируемую на выходе фотоприемника. С интервалом времени быстродействия фотоприемника 19, равного 3•10-9 с, ПЭВМ 21 устанавливает поочередно в регистре адреса приемников 25 номера опрашиваемых фотоприемников соответствующей для данного светодиода дуги и заносит информацию об их состоянии в регистр памяти ПЭВМ 21. Эта информация формируется в виде первой строки матрицы результатов измерений каждого горизонтального сечения, в начале которой фиксирован номер первого источника i, номер первого Фo i и состояние всех остальных опрашиваемых для данного источника фотоприемников в ячейках ij матрицы. Таким образом, текущий номер Иi подключаемого светодиода 18 и номер Фj опрашиваемого фотоприемника 19 регистрируется в управляющем блоке 30 цифровой регистрации на ПЭВМ 21, где формируются стоки матрицы результатов измерения сечения, с номером i(i=l,М) включенного светодиода Иi, ячейки которой по столбцам j(j=l,N) формируются согласно предварительно заданному индексу отсчета ИО: ji=(0,(N/2+2)i (фиг.5) опроса фотоприемников 19 и содержат результаты опроса (преобразованные электрические сигналы) соответствующей заданному источнику Иi и номеру строки i дуги ∪ = (0, N/2+2)i фотоприемников 19. Кроме того, в начале каждой строки фиксирован индекс отчета v горизонтального уровня измерения.
Опросив всю группу фотоприемников, установленных на кольцевом основании 17, ПЭВМ 21 вновь выставляет сигналом L1 в регистр адреса источников излучения 24 номер И1 следующего по порядку в кольцевом основании 17 светодиода 18 в направлении стрелки В, подключая его через коммутатор 22 к источнику питания. Далее производится опрос состояния всех фотоприемников для подключенного второго светодиода с регистрацией их состояния в регистре памяти ПЭВМ 21, формируя информацию в виде второй строки матрицы результатов измерения сечения. Процесс продолжается до включения последнего светодиода 18, установленного в кольцевом основании и приема информации от всех фотоприемников для этого светодиода. После этого управляющая ПЭВМ 21 переходит в режим ожидания следующего импульса запуска L от устройства, соответствующего началу обмера сечения на следующем горизонте с индексом v=2. Положение следующего горизонта соответствует смещению кольцевого модуля 5 вдоль вертикальной направляющей стойки 2, равному шагу ходового винта h.
Общее время регистрации одного сечения в горизонтальной плоскости не превышает величины 0,3 с, равной времени одного полного оборота ходового винта 6, и определяется временем электронного переключения оптических компонентов, составляющим 3•10-9 с.
С началом второго оборота тягового винта 6, соответствующего следующему уровневому горизонтальному положению каретки с кольцевым модулем 5, в электронном блоке управления устройством микро выключатель 13 формирует новый импульс запуска L, поступающий на ПЭВМ 21, и процесс обмера повторяется для данного горизонтального уровня кольцевого модуля 5. Отсчет электрических импульсов L микро выключателя 13, регистрирующих следующие друг за другом в процессе измерения с заданным равным шагом горизонтальные уровни v измерений сечений, осуществляется на ПЭВМ 21.
В конечном итоге процесс обмера завершается оператором выключением клавиши 11 или командой остановки выполнения программы измерения фигуры человека с клавиатуры 27 ПЭВМ 21. При необходимости измерения фигуры человека в обратном направлении (например, стрелки А') оператор включает клавишу реверса 12, затем клавишу пуск 10. Процесс обмера повторяется в обратном направлении по вертикали и заканчивается выключением клавиши 11 или командой управляющей программы на ПЭВМ с клавиатуры 27.
Изображение сечений поверхности объекта плоскостями уровня получают в режиме реального времени на устройстве отображения - мониторе 28.
В итоге в управляющем блоке 30 цифровой регистрации формируется массив результатов обмера сечений (файл данных), заключающий в себе описание формы обмеряемой фигуры в виде проекционных данных по многим направлениям вдоль прямых распространения света (световых лучей) на фотоприемники, формируемый из матриц результатов измерений сечений с фиксированным отсчетом v уровня плоскости измерения по вертикали и размером [М, N], элементы которой принимают одно из двух значений состояния излучения: 1 - есть свет, 0 - свет блокирован объектом. По значениям матрицы вычисляют касательные к поверхности лучи и восстанавливают сечения поверхности объекта, в совокупности формирующие дискретный линейный каркас поверхности - ее топографию. После записи массива проекционных данных измерение завершается, а результат определяется расчетным путем.
Итак, бесконтактное измерение топографии поверхности объекта осуществляется следующим способом. После того, как оптические компоненты управления световым лучом излучателя и оптического приемника разместили в одной горизонтальной плоскости по окружности радиуса R в соответствии с фиг.6, т.е. ограничили область измерения, и поместили внутри этой области в центральной ее части объект, поверхность которого необходимо измерить, в продольном вертикальном положении относительно плоскости измерения, выполняют измерение топографии его поверхности, основанное на последовательном скользящем измерении вдоль продольной вертикальной оси объекта контуров дискретных поперечных горизонтальных сечений его поверхности в пренебрежимо малом интервале вертикального слоя поверхности при непрерывном смещении горизонтальной плоскости окружности вдоль центральной вертикальной продольной осевой линии объекта, по последовательности которых осуществляется геометрическая реконструкция поверхности объекта, образующая дискретный линейный каркас - топографию поверхности объекта.
По данному способу поверхность облучают последовательно с точечных позиции на окружности широкоугольными источниками, угол обзора которых превышает угловые поперечные размеры объекта, вдоль числа М•N/2 направлений, лежащих в плоскости окружности, где М - количество источников в окружности (соответственно число положений точки оптического облучения объекта) или ракурсов облучения Oi, N - количество фотоприемников (число положений точки приема излучения источника на дуге излучения) дуги опроса для одного ракурса (фиг. 5). Излучение источника света ориентируют относительно направления на центр О окружности. Ориентация излучения источника света осуществляется по угловому положению радиус-вектора точки излучения на окружности относительно оси начала отсчета Оу (фиг.5, 6). При этом с каждой фиксированной точки положения источника в плоскости секущей поверхность объекта окружности ее облучают одновременно вдоль N/2 направлений веерным пучком расходящихся лучей D, которые проецируют в плоскости окружности на противоположную источнику дугу, где принимают затененные и незатененные объектом лучи и фиксируют следы лучей в точках положения фотоприемников путем последовательного опроса их состояния в направлении стрелки С (фиг.5, 6). Измеряя амплитуду электрического сигнала фотоприемников дуги опроса, из преобразованных электрических сигналов приемников выделяют группу с нулевым сигналом, соответствующую дуге тени объекта на окружности. Геометрически соединяя в плоскости окружности прямыми точку i положения источника облучения и точки ji и ji' положения приемников, соответствующих концам дуги тени объекта ∪=(ji ji') для выделенной группы приемников с нулевым сигналом, получают касательные к поверхности объекта лучи в сечении 29 (фиг.7). По заданным координатам положений источников и приемников на окружности определяют координаты концов дуги тени и вычисляют положения касательных в окружности.
Последовательно смещая точку облучения поверхности в направлении стрелки В, например, из позиции i в позицию i+1 (фиг.7), и многократно повторяя указанную последовательность действий для каждой фиксированной точки положения источника облучения на окружности, определяют одновременно в одной горизонтальной плоскости положение двух касательных лучей слева и справа к поверхности объекта, охватывающих контур поперечного сечения объекта с двух противолежащих сторон поверхности.
Собранные данные формируют матрицу проекционных данных сечения построчно для каждого горизонтального уровня v в порядке смещения плоскости измерения по вертикали в заданном направлении. Из матриц проекций по следующим друг за другом горизонтальным уровням плоскости последовательно формируется сплошной массив проекционных данных обмера поверхности объекта. Порядковым номером горизонта определяется номер матрицы проекций в сплошном массиве проекционных данных обмера по всем горизонтам. Каждому направлению распространения излучения источника в пространстве вдоль расходящихся прямых на фотоприемники соответствует определенное, в зависимости от освещенности фотоприемника, значение напряжения на выходе фотоприемника, которые в режиме реального времени измерения преобразуются в цифровые. Оптический параметр излучения, регистрируемый каждой группой фотоприемников, является функцией положения в кольцевом модуле каждого луча веерного пучка излучения. Таким образом, совокупность пространственных отчетов значений оптического параметра излучения в результате аналогового цифрового преобразования будет представлена массивом чисел в двоичном коде. Что позволяет отвлечься от времени реального сканирования и производить дальнейшие необходимые преобразования как операции над числами этого массива.
По проекционным данным, полученным по преобразованным сигналам фотоприемников вдоль системы расходящихся лучей с различных позиций в окружности определяют теневой контур сечения δG(фиг.8), составленный последовательностью линейных элементов малой длины касательных лучей в окрестности точек Si (фиг.8) их касания измеряемого контура сечения δS, соединенных между собой узловыми (опорными) точками Psi пересечения касательных. Таким образом, в результате последовательного определения координат узловых точек Psi их пересечения для каждой пары соседних точек положения источников на окружности в ее плоскости в режиме реального времени измерения каждого горизонтального сечения поверхности объекта или одновременно по правым и левым концам дуги тени объекта путем последовательного пересечения касательных с ближайшим угловым положением в окружности в системе координат измерений Оху, вычисляемому по параметру k=tgθ - угловой коэффициент касательной и в - ордината точки пересечения касательной с осью Оу, при обходе вокруг объекта в заданном направлении стрелки В (фиг.8). Геометрическая картина, представленная на фиг. 8, соответствует матрице результатов, полученной для сечения фигуры человека плоскостью Н, где пересекающиеся прямые соответствуют касательным к контуру обмеряемого сечения и определяются границами тени для каждого ракурса обзора лучом. При этом получают бинарное векторное изображение контура горизонтального сечения. При таком "цифровом" представлении контура сечения можно составить "дискретированную" геометрическую картину сечения, заменяя действительный гладкий непрерывный контур сечения δS поверхности множеством отрезков касательных, полученных с различных ракурсов к этой поверхности и образующих ломаную δG (фиг.9). Измеряемый контур сечения, таким образом, может быть аппроксимирован последовательностью узловых точек сечения и восстановлен путем линейной и кусочно-дуговой аппроксимации последовательности опорных точек сечения, а недостающие характерные точки сечения определены кубической сплайн-интерполяцией значений их положений по известным дискретным значениям функции ломаной δG в системе Pi полученных узловых точек.
На фиг.5 представлена иллюстрирующая способ схема геометрии сбора данных для веерного пучка расходящихся лучей D источника в горизонтальной плоскости при последовательном смещении в заданном направлении стрелки В по окружности радиуса R точки i широкоугольного облучения области измерения, занимаемой объектом 29, фиксируемой в заданных точках положения источников 18, согласно которой при измерении контура сечения 29 поверхности объекта каждому фиксированному положению i или i* точки облучения на окружности соответствует группа опроса фотоприемников 19, размещенных в точках той же окружности и вмещаемых соответственно дугой ∪ = (0, N/2+2)i и  на противоположной источнику стороне окружности, данные опроса которых (Δ, λ)i и
на противоположной источнику стороне окружности, данные опроса которых (Δ, λ)i и  соответственно построчно фиксированы в матрице результатов измерения контура одного сечения, где согласно схеме координатного представления оптических компонентов (фиг.6) Δ = i•Δϕ, λ = ji•Δϕ/2 и
соответственно построчно фиксированы в матрице результатов измерения контура одного сечения, где согласно схеме координатного представления оптических компонентов (фиг.6) Δ = i•Δϕ, λ = ji•Δϕ/2 и  (i= (0, М-1), j= (0,N-1)). Данные опроса включают группу фотоприемников 19 с нулевым сигналом, вмещаемую дугой тени объекта в плоскости окружности
(i= (0, М-1), j= (0,N-1)). Данные опроса включают группу фотоприемников 19 с нулевым сигналом, вмещаемую дугой тени объекта в плоскости окружности  и
и  соответственно, на концах которой в соответствующие точки положения фотоприемников из точки положения источника той же окружности проецируются касательные к поверхности объекта лучи di и D'i, охватывающие ее контур δS в сечении S с двух противолежащих сторон объекта (справа и слева). Точки пересечения касательных Рs и PS′ являются узловыми (опорными) точками сечения. Данная схема сбора данных позволяет, не снижая скорости обмера, вычислять касательные к контуру сечения измеряемой поверхности по полученным границам тени сечения одновременно с обеих сторон объекта из одной позиции облучения и, тем самым, единовременно определять одномерную проекцию плоского поперечного сечения тела человека.
соответственно, на концах которой в соответствующие точки положения фотоприемников из точки положения источника той же окружности проецируются касательные к поверхности объекта лучи di и D'i, охватывающие ее контур δS в сечении S с двух противолежащих сторон объекта (справа и слева). Точки пересечения касательных Рs и PS′ являются узловыми (опорными) точками сечения. Данная схема сбора данных позволяет, не снижая скорости обмера, вычислять касательные к контуру сечения измеряемой поверхности по полученным границам тени сечения одновременно с обеих сторон объекта из одной позиции облучения и, тем самым, единовременно определять одномерную проекцию плоского поперечного сечения тела человека.
На фиг.8 показано сечение S обмеряемой фигуры горизонтальной плоскостью Н окружности с центром в т. О и радиусом R для последовательного изменения положения на окружности точки облучения объекта 29.
Пример расчета координат точек поверхности в сечении поясняется фиг.6-7. Расчет координат точек пересечения касательных лучей по положению касательных в окружности поясняется фиг.7. Расчет координат точек поверхности в сечении может быть выполнен следующим образом.
Для вычисления положения касательных в окружности радиуса R и аналитического описания измеренной поверхности задают координатную систему Оху системы измерений, имеющую центр в точке пересечения диаметров окружности, причем ось Oz вертикальна и перпендикулярна плоскости нулевого уровня измерений, а ось Оу проходит через точку на окружности, соответствующую положению первого источника света.
Определяют координаты узловых точек контуров сечений поверхности объекта по полученным проекционным данным вдоль касательных, положение которых в кольцевой измерительной системе Оху рассчитываются по следующим формулам:
Xi = R•sin[i•Δϕ], Yi = R•cos[i•Δϕ], (3)
где i - индекс источника в измерительной системе,
i={0,M};
М - количество источников в измерительной системе;
j - индекс приемника в измерительной системе,
J={0, N};
N - количество приемников на окружности;
R - радиус окружности измерительной системы;
Δϕ - угловая дискретность положения приемников на окружности;
ϕi = i•Δϕ - угловое положение источкника i в окружности;
ϕj/= (2j+1)/4•Δϕ - угловое положение фотоприемника j в кольцевом модуле;
Xi, Yi и Xj, Yj - декартовы координаты точки положения оптических компонентов, источника и приемника соответственно, измерительной системе Оху соответственно на оси Ох и Оу;
Оху - прямоугольная декартова система координат в окружности измерительной системе.
Формулы (3) и (4) предназначены для вычисления координат точек положения оптических компонентов окружности в ее плоскости Оху. Схема координатного представления компонентов приведена на фиг.(фиг.6).
где (xi, уi) и (xi+1, уi+1) - координаты точки положения источников на окружности для первой и второй касательных соответственно;
(xji, уji) и (xj(i+i), уj(i+i)) - координаты точки положения приемников на окружности для первой и второй касательных соответственно;
(x, у) - координаты точки пересечения касательных (узловой точки Ps).
Уравнения (5) задают положение части каждой касательной, ограниченной с обеих сторон в окружности. Согласно уравнениям (5) положение касательных с заданным направлением в окружности в системе координат Оху измерительной системы аналитически определяют способом расчета уравнений прямых, проходящих через две заданные точки (например, (xi, уi) и (xji, уji) для первой касательной). Решение системы этих двух уравнений для двух касательных определяет координаты точки их пересечения Psi (x, у) - узловую точки сечения, являющуюся вершиной ломаного контура δG измеренной внутренней области поверхности G. Полученный контур образован очерковыми касательными поверхности в сечении S и описан около гладкой границы истинного контура δS области сечения S, приближая его с заданной конфигурацией устройства точностью (фиг.7, 8):
где xi-1=a, (xi,yi)=(a,b,), yi=b,
xj(i-1)=c, (xji,yji)=(c,d), yji=d,
xi+1=k, (x(i+1),y(i+1))=(k,1), yi+1=1, (7)
xj(i+1)=m, (xj(i+1), yj(i+1))=(m,n), yj(i+1)=n
При этом близлежащие узловые точки сечения формируют пары, каждой из которых единственным образом соответствует отрезок касательной к контуру сечения, образованный в результате ее последовательного пересечения двумя соседними касательными с ближайшими значениями углового коэффициента, k=tgθ, и ординаты точки пересечения касательной с осью ординат, b, при обходе вокруг объекта по касательным в заданном направлении. Последовательность таких отрезков, связанных между собой общими узловыми точками Ps, составляет дискретированный контур δG измеренного сечения поверхности тела человека плоскостью уровня (фиг.8), к которому может быть применен метод сглаживания кривой с использованием В-сплайна по набору полученных узловых точек и построен гладкий контур горизонтального сечения поверхности. Иными словами, при необходимости форма кривой гладкого непрерывного контура горизонтального сечения поверхности может быть восстановлена в результате аппроксимации последовательности точек пересечения касательных для полученных первичных проекционных данных на плоскости плоской кривой типа В-сплайна, а именно кривой полинома третьей степени для каждого сегмента контура в интервалах между точками, соответствующих отрезкам касательных между ними, или дугой для отдельных сегментов кривой контура, а характерные точки линий обмера фигуры и ее параметры могут быть получены на ПЭВМ с помощью интерполяции этих данных, что незначительно усложняет измерение, так как система предполагает наличие вычислительного устройства.
Таким образом, граница δG является приближением измеренного контура поверхности, причем при больших расстояниях между узловыми точками контура сечения точность измерения мала, что характерно для прототипа.
Координаты точек поверхности в сечении с достаточно высокой точностью вычисляют как середины полученных отрезков касательных по следующим формулам:
где Ps (i+1) и Psi - пара соседних узловых точек сечения, принадлежащая одной касательной.
Это возможно, поскольку при достаточно большом количестве проекционных данных вдоль касательных длины отрезков предельно малы.
Дискретный линейный каркас поверхности получают последовательным повторением указанных действий на следующих друг за другом в заданном направлении по вертикали с заданным равным шагом горизонтальных уровнях измерений, фиксируемых на вертикали по отсчетам v положений плоскости окружности. Так, что форму измеряемого контура горизонтального сечения объекта определяют с учетом высоты каждого контура горизонтального сечения над плоскостью нулевого уровня отсчета измерений сечений тем, что в начале измерения первого сечения топографии поверхности объекта дополнительно измеряют по шкале расстояние от опорной плоскости нулевого уровня отсчета до уровня начала измерений сечений - первого горизонтального уровня измерения топографии поверхности объекта и определяют абсолютные значения высоты точек измеренных контуров сечений поверхности по формуле:
HSv=h0+v•h,
где S - номер луча, вмещающего точку, (S=1,N);
М - количество лучей, соответствующее количеству приемников на окружности;
v - номер измеренного горизонтального сечения поверхности, (v=1,К);
К - количество измеренных горизонтальных сечений поверхности;
h0 - высота первого горизонтального уровня измерения топографии поверхности объекта над плоскостью нулевого уровня отсчета измерений сечений;
h - шаг смещения плоскости уровня измерения сечения по вертикали.
По последовательности измеренных сечений осуществляется геометрическая реконструкция поверхности объекта, образующая дискретный линейный каркас -топографию поверхности объекта.
Экспериментальное доказательство достижения цели на примере конкретной реализации способа в устройстве бесконтактного измерения топографии поверхности объекта представлено на фиг.9, 10.
Фиг. 9 наглядно иллюстрирует результат реконструкции измеренного сечения поверхности объекта по реальным данным измерения без предварительного анализа и обработки информации, т.е. представляет показания всех фотоприемников для всех ракурсов измерений. Здесь внешний контур светлой незаштрихованной центральной области окружности является геометрическим местом точек пересечения касательных к поверхности объекта лучей в ее горизонтальном сечении, собранных для всех точек последовательных положений источников облучения объекта на окружности, полученный одновременно по правым и левым концам дуги тени объекта путем последовательного пересечения касательных с ближайшим угловым положением в окружности, вычисленным по координатам соответствующих точек положения источников и приемников на окружности, при обходе вокруг объекта в заданном направлении. Представленный графический результат показывает, что по данному способу измерения поверхности объекта готовая реконструкция каждого горизонтального ее сечения может быть получена непосредственно по первичным проекционным данным обмера в режиме реального времени измерения. Что свидетельствует о возможности технического достижения цели изобретения для данного способа бесконтактного измерения топографии поверхности объекта, преимущественно фигуры человека, при его осуществлении данным устройством.
При измерении поверхности фигуры человека необходимо стремиться к тому, чтобы измерение всей поверхности занимало минимальное количество времени, так как утомление измеряемого отражается на его позе и может повлиять на точность измерений. А также для обеспечения наибольшего соответствия измеряемых контуров горизонтальным сечениям поверхности объекта измерение каждого контура должно производится в пренебрежимо малом интервале вертикального слоя h его поверхности путем практически мгновенного определения геометрического места точек, по которому определяют измеряемый контур. Фиг.10 поясняет зависимость точности измерения одного сечения от толщины вертикального слоя h поверхности, который пересекает в продольном направлении относительно объекта плоскость измерения контура сечения и от времени его измерения при реализации способа измерения полной топографии поверхности объекта с непрерывным равномерным перемещением секущей плоскости уровня измерения вдоль продольной вертикальной оси объекта в процессе его поперечного облучения. В общем случае, при данной реализации способа измерения поверхности, последовательность изменяющихся в заданном направлении (например, по часовой стрелке) положений точки измерения контура поверхности на окружности, плоскость которой непрерывно перемещается по вертикали (например, сверху вниз), образует в пространстве цилиндрическую винтовую линию (фиг.10 а) с радиусом R и с некоторым шагом по вертикали h -винтовую траекторию движения данной точки, фиксирующей на окружности области измерения касательную к поверхности прямую (см., например, авторское свидетельство СССР 341465, кл. А 41 Н 1/04, 1969; и "Optical method and apparatus for measuring surface topography of an object" US 5,636,030, publ. 3.06.1997, Int. Cl.6 G01B 11/10; G 02 B 26/08). Соответственно совершает винтовое движение луч касательной, с началом в точках цилиндрической винтовой линии и направленный внутрь к объекту, перпендикулярно вертикальной оси. Луч в процессе измерения в точках касания описывает на поверхности с каждой ее стороны незакономерный винтовой контур. При этом за каждый виток цилиндрической винтовой линии, описанный началом луча, точка его касания поверхности проходит дискретные криволинейные отрезки δS измеряемого винтового контура поверхности, заключенные в пределах ее слоя высотой h. Следовательно, плоской реконструкцией сечения поверхности при данной реализации способа получения топографии будет являться очерк горизонтальной проекции винтового контура δS поверхности, измеренного в слое h за время обмера данного сечения, на плоскости начального элементарного уровня данного слоя. Таким образом, зависимость точности измерения одного сечения от времени его измерения в слое h соответствующего уровня v, поясняемая на фиг. 10, выражается точностью приближения измеренного контура δS некоторого малого слоя h поверхности объекта его горизонтальной проекцией, а именно, реконструкцией ломаным контуром δG в плоскости уровня v начала сканирования сечения. Точность приближения измеренного контура его проекцией определяется приращением соответствующих длин рассматриваемых контуров и зависит от угла наклона плоскости косого сечения положения витка δS измеренного винтового контура поверхности к плоскости проекции положения соответствующего горизонтального сечения (на фиг. не показано). Поскольку все измерения поверхности выполняют в горизонтальной плоскости, перпендикулярно центральной вертикальной осевой линии объекта измерения, величину этого угла характеризует угол подъема Ω цилиндрической винтовой линии положений начала луча каждой касательной к поверхности прямой на окружности, образующей при вертикальном перемещении цилиндрическую поверхность. Угол подъема Ω определяется величиной шага h цилиндрической винтовой, и зависит от скорости последовательного изменения положений начала луча на окружности, что иллюстрируется фиг.10 а, б.
На фиг. 10 а представлена винтовая линия, лежащая на цилиндрической поверхности, образуемой движением ограничивающей область измерения окружности радиуса R и с центром в точке О вдоль вертикальной оси. Цилиндрическая винтовая линия L образована в результате одновременного изменения углового положения позиции измерения Иi на образующей окружности в заданном направлении по часовой стрелке, условно соответствующего равномерному вращению точки Иi вокруг оси цилиндрической поверхности, и равномерного движения образующей окружности вместе с точкой вдоль направляющей оси цилиндра сверху вниз. При развертке цилиндрической поверхности I на плоскость винтовая линия превращается в прямую L'.
На фиг.10б представлены проекции и развертка одного витка L'k-1 винтовой линии L для развертки слоя h цилиндрической поверхности I. Горизонтальная проекция развертки L'k-1 соответствует длине образующей окружности L″ = 2π•R и определяет угловое перемещение точки ϕ = 2π по окружности за время Т ее полного оборота с угловой скоростью вращения ω = ϕ/T при обмере одного сечения. Фронтальная проекция развертки соответствует линейному перемещению точки на величину шага h винтовой линии вдоль образующей цилиндра за время tc обмера одного сечения, соответственно ее полному обороту вокруг объекта, с линейной скоростью V=h/tc. Причем точка фиксирована на образующей окружности R в начальной позиции измерения сечения И1. Величина h при этом определяется из формулы:
h = V•2π/ω. (9)
Из рассмотрения развертки цилиндра I с нанесенной цилиндрической винтовой линией L (фиг. 10б) можно установить зависимость между радиусом цилиндра R, шагом h и углом подъема винтовой линии Ω, а именно

Исходя из этого расстояние h по высоте между смежными уровнями v секущих поверхность плоскостей сечений постоянно и задает высоту сечения. Для повышения точности измерения сечения стремятся, чтобы толщина вертикального слоя h поверхности была минимальной и длина одного витка L'k-1 винтовой линии максимально приближалась к длине ее горизонтальной проекции L", что достигается, согласно формуле (11), при Ω стремящемся к нулю. Величина h при этом определяется по формуле (10), тогда tgΩ вычисляется как
tgΩ = V/(ω•R) (12)
Величина h и соответственно Ω при этом зависят от скорости обмера сечения ω, которая должна быть максимальной, что следует из формулы (10). Причем оптимальное значение линейной скорости V вертикального перемещения определяется допустимым значением t времени измерения всей поверхности, при котором не произойдет изменение позы измеряемого. Тогда при фиксированном постоянном значении линейной скорости V, соответствующей, например, скорости вращения электродвигателя механизма вертикального перемещения кольцевого модуля поперечного многоракурсного облучения объекта пучком световых лучей в устройстве, скорость обмера сечения будет определяться угловой скоростью ω изменения положения точек облучения на окружности.
Таким образом, толщина малого слоя h поверхности в каждом сечении при последовательном послойном скользящем измерении ее сечений зависит от отношения V/ω (10, 12) линейной скорости вертикального перемещения кольцевого основания с оптическими компонентами управления световым лучом вдоль объекта измерения к скорости углового перемещения точки облучения на окружности при изменении ракурса измерений.
Задавая, таким образом, значения угловой скорости обмера сечения в порядке уменьшения ее величины, последовательно уменьшают значения угла Ω подъема цилиндрической винтовой и получают по расчету (9)-(12) последовательность соответствующих значений длины развертки витка L', пределом которой при угле Ω, стремящемся к нулю, является ее горизонтальная проекция L", определяемая длиной окружности кольцевого основания, ограничивающей область измерений:
где
tgΩ = V/(ω•R),
V=const, R=const.
Таким образом, при достижении высокой скорости измерений в горизонтальных направлениях очерк горизонтальной проекции некоторого измеряемого малого слоя h данной поверхности будет точно соответствовать контуру горизонтального сечения поверхности на начальном элементарном уровне v (фиг.10а) данного слоя. На фиг.10в графически представлена линейная функциональная зависимость угла подъема tgΩ винтовой траектории движения точки положения источника облучения на окружности в процессе измерения топографии поверхности объекта от времени Т измерения одного ее сечения при постоянных параметрах устройства (скорости вертикального перемещения кольцевого модуля Vэл и его диаметра R) для углового коэффициента k графика, рассчитанного по его фактическим заданным параметрам, согласно формуле:
Точка А на графике соответствует максимально допустимому времени измерения сечения объекта t=0,3 между последовательными электрическими импульсами датчика начала измерения сечения при данных параметрах устройства. Точка А' соответствует фактическому времени измерения сечения при условии осуществления безынерционного электронного управления сканированием для данной технической реализации способа измерения.
В данном осуществлении способа измерения топографии поверхности объекта линейная скорость V задается скоростью Vэл вращения электродвигателя привода вертикального перемещения плоскости измерения кольцевого модуля поперечного многоракурсного облучения его внутреннего пространства пучком световых лучей, а высотный параметр h, задающий расстояние между смежными уровнями v горизонтальной плоскости измерений сечений в общей топографии поверхности, соответствует шагу ходового винта механизма вертикального перемещения кольцевого основания и соответственно ее линейного вертикального перемещения, h=2 мм, так, что время обмера одного сечения в горизонтальной плоскости не должно превышать tc=0,3 с. Скорость поперечного многоракурсного облучения пучком световых лучей минимальна за счет осуществлении его электронного управления при полном исключении движущихся механических элементов управления кольцевого модуля поперечного многоракурсного облучения пучком световых лучей поверхности в горизонтальной плоскости в сравнении с прототипом и определяется быстродействием электронных компонентов устройства и скоростью передачи данных между устройством и ПЭВМ. Скорость изменения положений точек измерений в окружности определяется временем электронного переключения источников и элементов блока управления излучением. Так, что фактическое время измерения одного сечения составляет десятки микросекунд, то есть его измерение производится практически мгновенного, и соответствует ничтожно малой доле величины угла Ω′ (фиг.10 б, в) подъема винтовой линии для пренебрежимо малого вертикального смещения h' (фиг.10 б) плоскости измерения в интервале вертикального слоя поверхности за время регистрации одного сечения. При этом точность приближения измеренного контура его плоской реконструкцией по параметру Ω′ предельно высока, то есть обеспечивается хорошее соответствие измеряемого контура горизонтальному сечению поверхности объекта. Величиной угла Ω′ можно пренебречь и считать измерения для всех позиций в окружности выполненными в одной горизонтальной плоскости. Таким образом, при скользящем способе измерения поверхности по вертикали при непрерывном перемещении плоскости измерения по вертикали достигается практически пошаговое измерение горизонтальных поперечных сечений поверхности объекта в плоскости.
Кроме того, измерение тени объекта с точечных позиций в два раза повышает информативность измерений по параметру числа линейных элементов, составляющих приближающий ломаный контур реконструкции измеренного сечения поверхности. Соответственно повышая точность приближения измеренного контура поверхности его плоской реконструкцией по параметру длины звеньев ломаной кривой.
Способ бесконтактного измерения топографии поверхности объекта и осуществляющее его устройство позволяют производить обмер фигуры человека с достаточно высокой точностью и, исключая непосредственные контакты элементов измерительной системы с обмеряемой поверхностью, вычислять дискретные замкнутые контуры поверхности в плоскостях горизонтальных поперечных сечений фигуры человека, и путем дополнительных математических преобразований получить линейное каркасное представление его поверхности и ее цифровое трехмерное изображение в системе с ПЭВМ.
Устройство позволяет повысить уровень автоматизации процесса измерения формы и размеров поверхности тела человека с представлением количественного результата в цифровом виде и обеспечивает в системе с ЭВМ создание в реальном масштабе времени измерения качественных цифровых изображений сечений полученной модели топографии поверхности с одновременной их визуализацией на экране дисплея. Отсутствие движущихся частей кольцевого модуля поперечного многоракурсного углового сканирования повышает надежность и упрощает устройство. Устройство обеспечивает полный охват поверхности тела человека при максимальной простоте реализации.
Время обмера одного сечения минимально и определяется быстродействием электронных устройств. За счет этого уменьшается вероятность погрешностей от возможных смещений фигуры человека относительно измерительного устройства. Устройство может быть установлено в помещении с незначительной площадью и использовано для проведения малых партий измерений в условиях индивидуального производства одежды, выполняя обмер фигуры человека с достаточно высокой точностью. Универсальность изобретения позволяет использовать его для подготовки исходных данных о поверхности фигуры человека в системе трехмерного автоматизированного проектирования одежды при построении шаблонов различных видов одежды известным способом (Н.Н. Раздомахин. Способ получения шаблонов одежды. // Патент РФ на изобретение 2101990. Опубл. 20.01.98. Бюл. 2.) или в других системах автоматизированного проектирования одежды, а также в качестве измерительного устройства для антропометрии в медицинских целях. Система может использоваться и для измерения других объектов - манекенов одежды и ее внутренних форм.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СТОПЫ | 1992 |
|
RU2031617C1 |
| СПОСОБ КОНТРОЛЯ ФИЗИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩЕЙСЯ НИТИ | 1996 |
|
RU2138588C1 |
| СПОСОБ АНАЛИЗА ГЕОМЕТРИЧЕСКИХ СТРУКТУРНЫХ ПАРАМЕТРОВ ТКАНИ | 2000 |
|
RU2164686C1 |
| УСТРОЙСТВО ДЛЯ СУШКИ ПЛОСКИХ МАТЕРИАЛОВ | 2000 |
|
RU2172905C1 |
| ПРИБОР ДЛЯ ТРЕХКООРДИНАТНОГО ОПРЕДЕЛЕНИЯ ФОРМЫ ОБЪЕКТА | 1990 |
|
RU2026623C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ОБРАЗЦОВ ДЛЯ КОНТРОЛЯ СТРУКТУРНЫХ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ НЕПРОЗРАЧНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2213343C2 |
| ДИФРАКЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ РЯДА ОСНОВНЫХ ХАРАКТЕРИСТИК ТКАНИ И ТКАНЕПОДОБНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2199739C2 |
| СПОСОБ ОТВЕРЖДЕНИЯ КЛЕЕВ | 1993 |
|
RU2045353C1 |
| ПРИЕМОНАМАТЫВАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022900C1 |

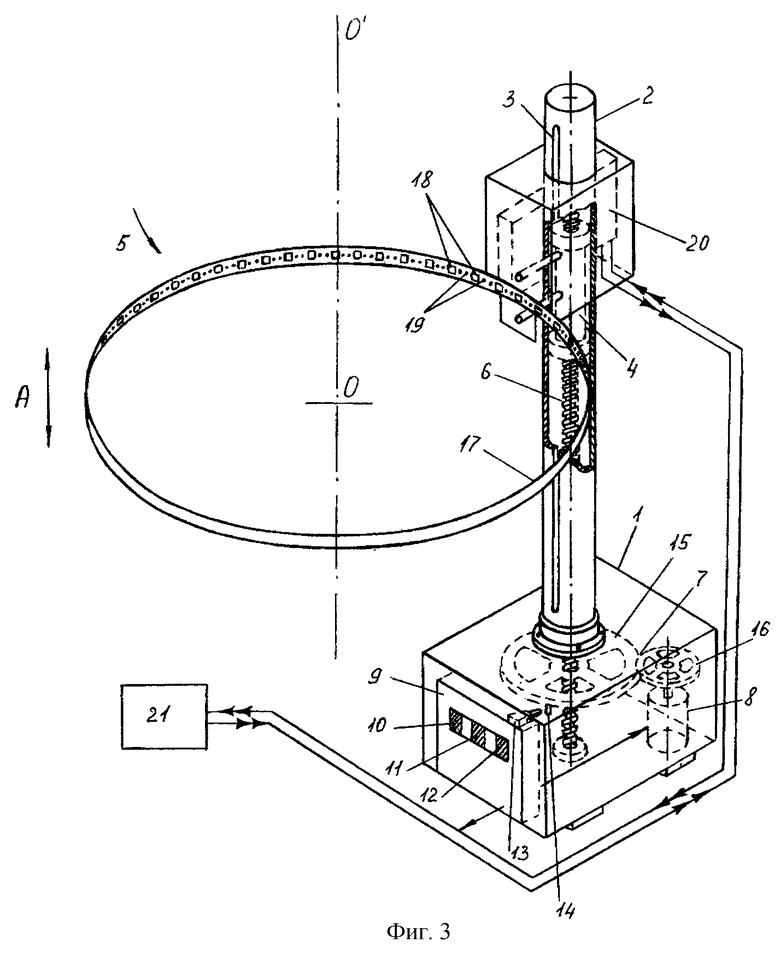
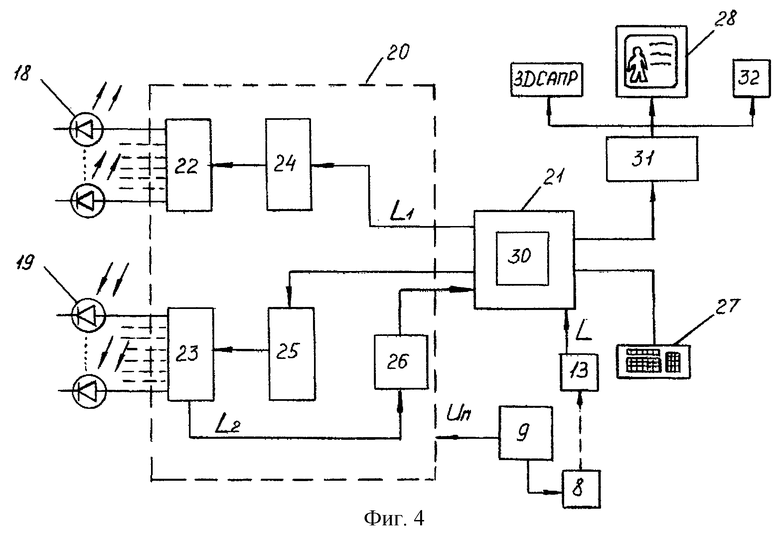
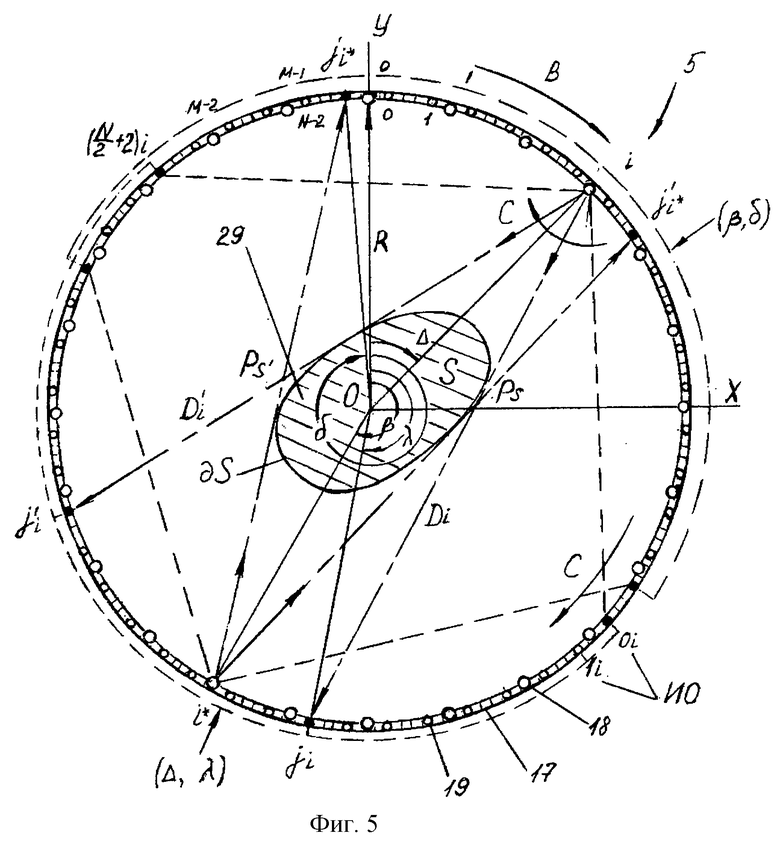
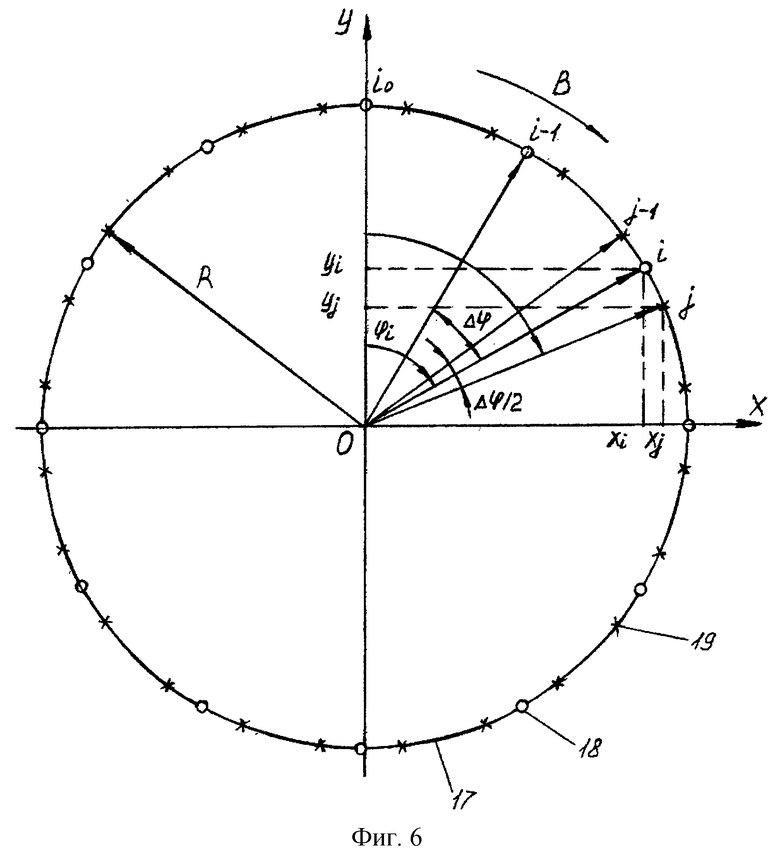
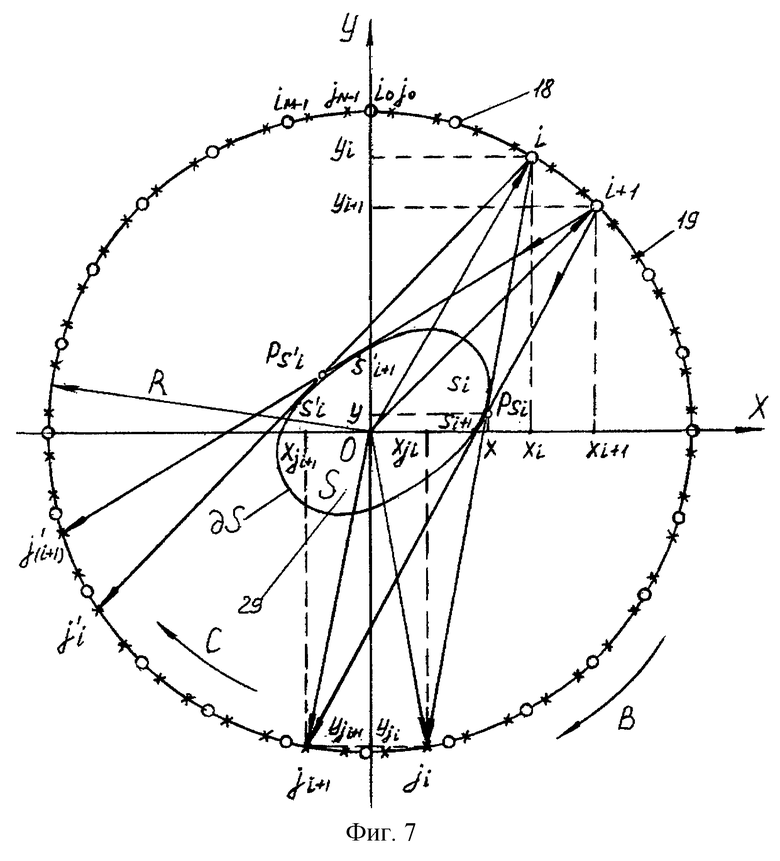
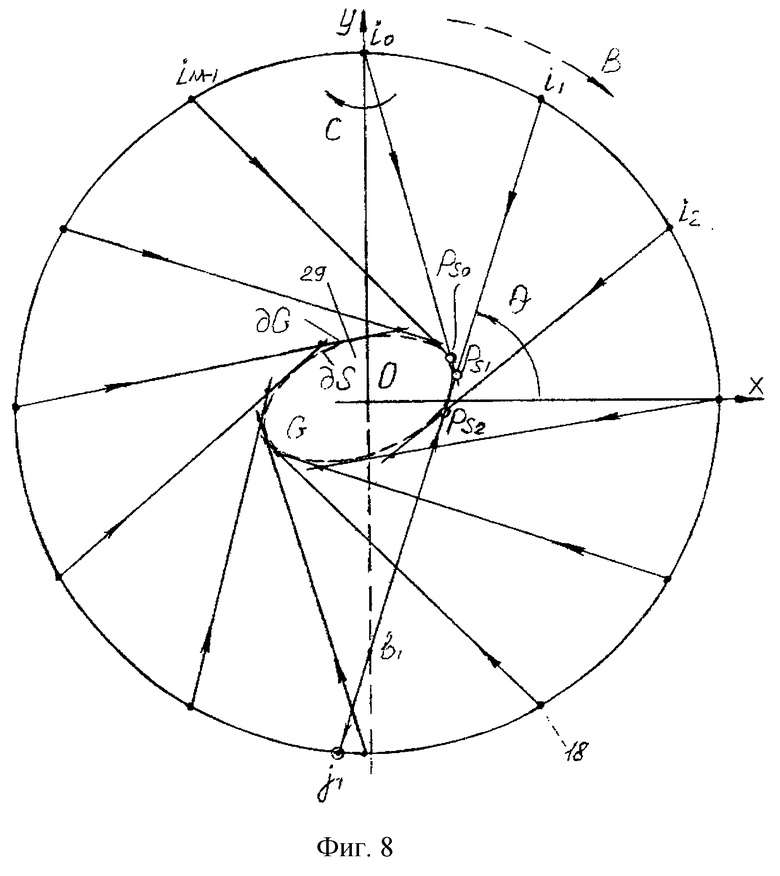
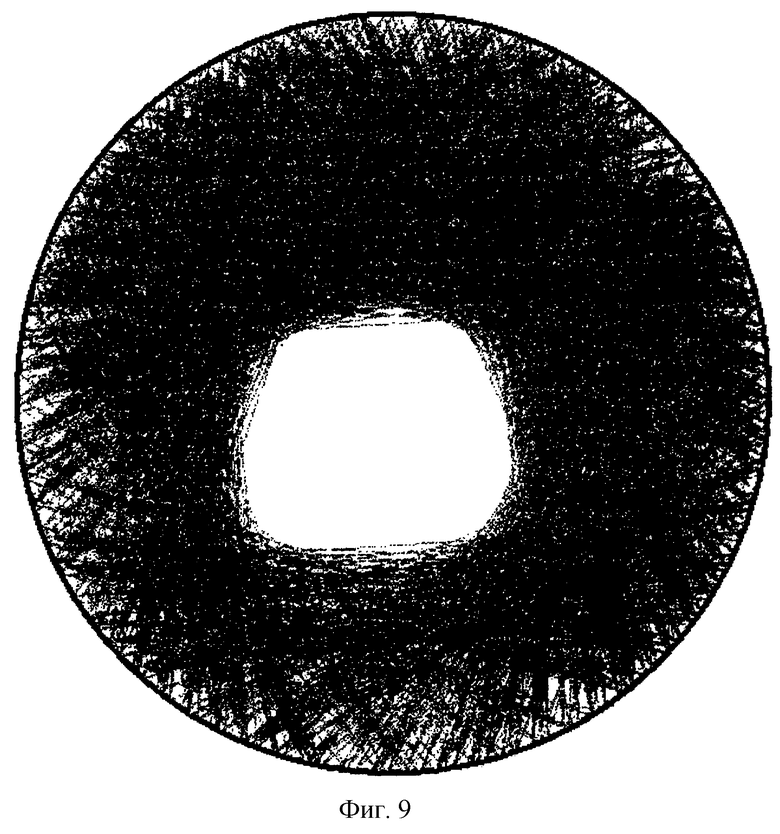
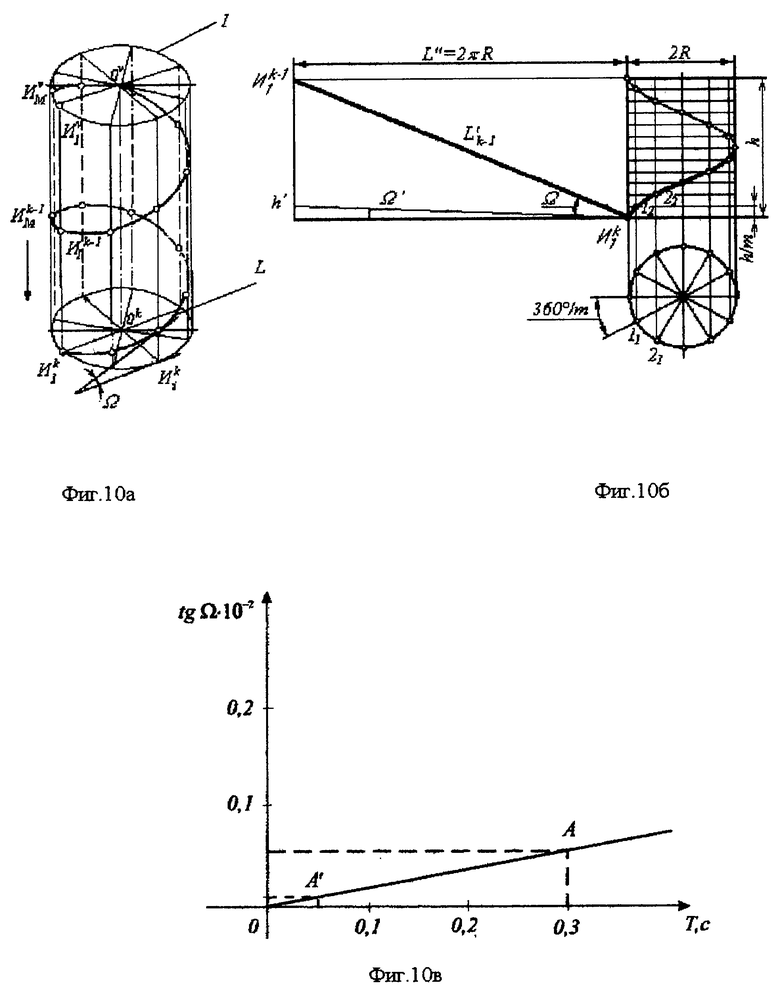
Способ бесконтактного измерения топографии поверхности объекта основан на последовательном измерении вдоль продольной вертикальной оси объекта контуров дискретных поперечных горизонтальных сечений его поверхности, по последовательности которых осуществляется геометрическая реконструкция поверхности объекта, образующая дискретный линейный каркас - топографию поверхности объекта. Для обеспечения наибольшего соответствия измеряемых контуров горизонтальным сечениям поверхности объекта измерение каждого контура производится в пренебрежимо малом интервале вертикального слоя его поверхности путем практически мгновенного определения геометрического места точек, по которому определяют измеряемый контур, образуемого пересечением множества полученных касательных лучей к поверхности объекта, охватывающих его с обеих сторон и лежащих в горизонтальной плоскости охватывающей объект окружности, положение которых определяется для каждой последовательно смещающейся по данной окружности точки положения источников широкоугольного оптического облучения объекта расходящимся веерным пучком лучей с угловой шириной, превышающей угловые поперечные размеры объекта, и соответствующего положения концов дуги тени за объектом на окружности, определяемого по сигналам оптических приемников, расположенных в заданных точках на той же окружности, из их группы, соответствующей противоположной источнику дуге окружности. Дискретный линейный каркас поверхности объекта определяют последовательным повторением указанных действий при скользящем смещении плоскости окружности вдоль вертикальной продольной оси объекта. Изобретение содержит и устройство для осуществления данного способа и обеспечивает повышение уровня автоматизации и точности индивидуального проектирования шаблонов одежды. 2 с. и 5 з.п. ф-лы, 12 ил.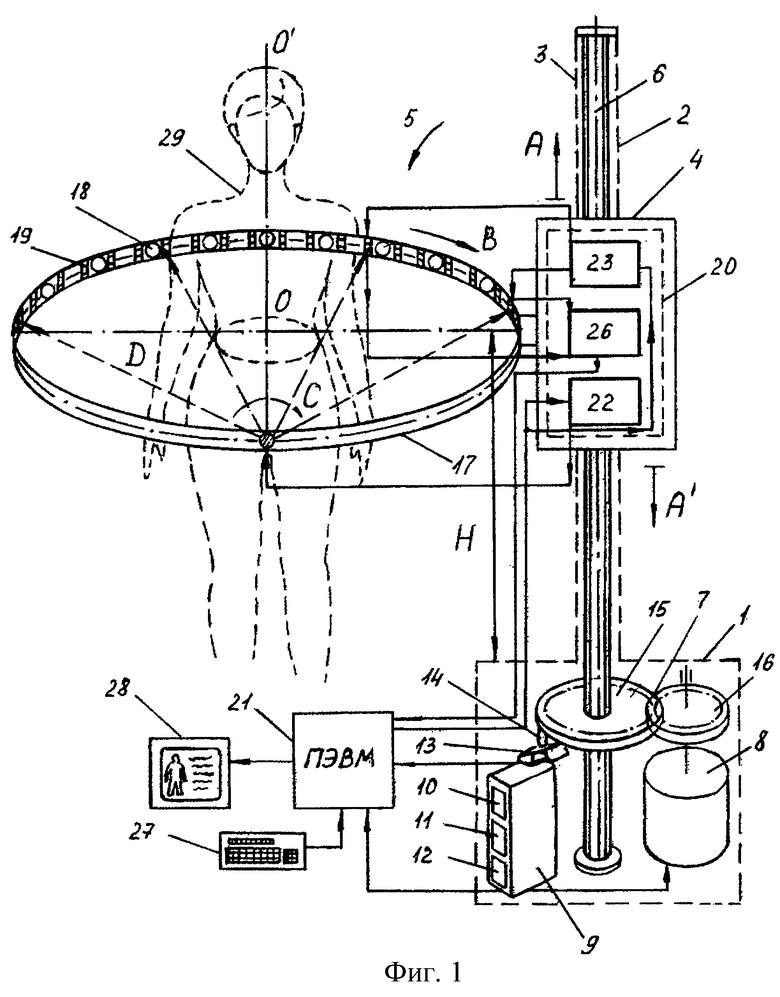
НSv=h0+v•h,
где S - номер луча, вмещающего точку (S=1, N);
М - количество лучей, соответствующее количеству приемников на окружности;
v - номер измеренного горизонтального сечения поверхности (v=1, К);
К - количество измеренных горизонтальных сечений поверхности;
h0 - высота первого горизонтального уровня измерения топографии поверхности объекта над плоскостью нулевого уровня отсчета измерений сечений;
h - шаг смещения плоскости уровня измерения сечения по вертикали.
| SU 5636030 A, 03.01.1997 | |||
| Способ обработки поверхностей трения | 1986 |
|
SU1463804A1 |
| РАСШИВКА ДЛЯ ШВОВ | 2006 |
|
RU2331745C2 |
| СПОСОБ ПРИЕМА И СПОСОБ ОТПРАВКИ ИНФОРМАЦИИ ПО КАНАЛУ НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ, УСТРОЙСТВО ПОЛЬЗОВАТЕЛЯ И СЕТЕВОЕ УСТРОЙСТВО | 2018 |
|
RU2696621C1 |

