Изобретение относится к автоматиэации контроля и управления производственными процессами и может быть использовано в айтоматизированных системах контроляи управления технологическими процессами и производством, а также в научных исследованиях и тех. никё, где требуется находить оптимальное значение величины ограниченных ресурсов, расходуемой сложной системой.
Известно устройство для определения используемого-ресурса изделия, которое содержит.датчик времени, датчик расхода ресурса, подключенный через интегратор к сумматору, соединенному с блоком сравнения, блок деления, подключенный к блоку произведения, индикатор 1.
Наиболее близким по технической сущности к предлагаемому является устройство, которое содержит датчик, первый выход которого подключен к входу первого блока умножения непосредственно и через последовательно соечдиненные блок нелинейности, интегратор к первому входу второго блока умножения, второй вход которого подключен к выходу блока деления, выход. ; первого блока умножения соединен с -г
входами сумматора, выход которого подключен к первому входу блока деления, выход второго блока умножения непосредственно и через последовательно соединенные регистры сдвига соединен с входами элемента сравнения, выходы которого подключены к первому входу элемента Ник входу датчика, выход которого соединен с вторым входом эле10мента И, вторые входы блока умножения, сумматора и блока деления подключены к входу устройства 2.
Недостатком известного устройства является низкая точность из-за того,
15 что оно служит только для определения момента регенерации ресурса и, кроме того, данное устройство.для определения ресурса не связывает запас ресурса с его расходом на полезное функцио20нирование сложной системы и нейтрализацию возмущающих воздействий,не учи-тьшает характера возмущающих воздействий, а также дополнительных расходов ресурсов на нейтрализацию возмуще25ний в системе, от правильного выбора которых зависит время полезного функционирования системы.
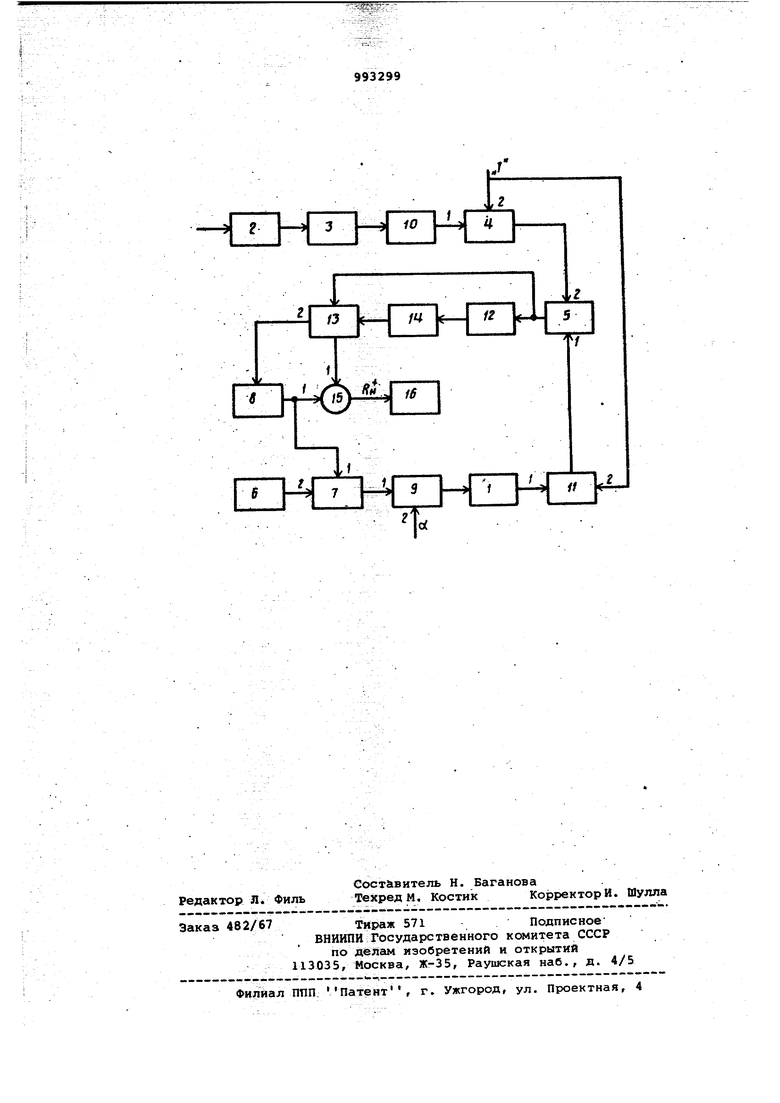
Це.ль изобретения - повышение точ- , ности работы устройства путем опреде30ления оптимального значения величины ограниченного ресурса в сложной системе, предназначенного для нейтрализации возмущающих воздействий и позволяющего максимизировать вероятност того, что время.полезного функционирования сложной системы будет не заданного. Указанная цель достигается тем, что устройство, содержащее датчик ра хода ресурса, первый блок нелинейное ти, первый сумматор, блок умножения. выход которого подключен непосредственно Ичерез последовательно соединенные регистры.сдвига к элементу сравнения, выход которого подключен к первому входу элемента И, и блок деления, первый вход первого суммато ра и блока деления соединены с входа ми устройства, введены второй и третий сумматоры, последовательно соеди ненные второй, 1ретий и четвертый блоки нелинейности, индикатор и датчик расхода ресурса на нейтрализацию возмущающих воздействий, выход которого подключен к второму входу элемента И и первому входу второго сумм тора, второй вход которого соединен с. выходом датчика расхода ресурса, выход второго сумматора подключен к .второму входу блока деления, выход которого через первый блок нелинейности соединен с первым входом третье го сумматора, выход четвертого сумма тора подключен к первому входу блока умножения, второй вход которого соединен с Выходом первого сумматора, второй вход которого подключен к выходу четвертого блока нелинейности, выход элемента И соединен с индикатором, второй вход четвертого сумматора и вход первого сумматора соединены с входами устройства. Любые материальные объекты, в том числе сложную систему, можно рассматривать как объекты, имекяцие ограниченный ресурс жизнедеятельности, который расходуется ими в процессе функционирования, а также на нейтрализацию возмущакацих воздействий, которым подвергается сложная система. Пусть задан общий запас ресурса R + Ry,, представляющий в общем случае случайную величину, причем R.- случайное значение величины ресурса, вьаделяемого на полезное функционирование сложной системы; Кц неслучайная величина ресурса, выделяемого на нейтрализацию возмущающих воздействий в системе. Время полезного функционирования сложной системы в условиях возмущени с рДной с ороны, зависит от величины общего запаса ресурса в системе и оп ределяется следующим образом .БЕа1 1 5игде oi - средний: расход ресурса в системе на ее полезное функционирование. С другой стороны, время полезного функционирования сложной-системы непосредственно зависит от величины Ru, и как только запас ресурса R исчерпывается на нейтрализацию поступающих в систему возмущений, т.е. RH становится равным нулю, функционирование {системы прекращается, так как вновь поступающие в систему возмущения приводят ее к. отказовому состоянию. Пусть на систему действуют возмущения , которые для своей нейтрализации тре-г буют соответствующее количество единиц ресурса R(4. В этом случае время полезного функционирования сложной системы является аргументом следующего условия Й5. ага-: И . (2) где fe - случайное значение в еличины возмущающих воздействий, требующее для своей нейтрализации заранее установочное допустимое ограниченное значение величины R , .при этом представляет собой случайную величину, зависящую от случайной величины . Таким образом, видим, что, с одной стороны , увеличивая RH, можно увеличить время полезного функционирова-. ния системы (2), ас другой стороны, увеличение Rj сказывается на уменьшении времени полезного функционирования (1). Можно сделать вывод, что случайное время Q(R) полезного функционирования сложной системы зависит от RH и определяется из следующего услрвия ) vrnфnф .Лн)Д пф U н Разработчикам сложных систем при рганизации их функционирования естественно руководствоваться принципом, то значение величины ограниченного ресурса R, выделенного на нейтрализацию возмущений, дЬлжно обеспечить аксимум вероятности того, что случайное время Q(RH) полезного функционирования сложной-сиетемы не менее некоторого заданного значения, т.е. y«axP Q№b)q,.; Используя положения известной теогии наиболее слабого звена, получаем, то (Rь) .RM) Rh)Q -t -PtT)1B-P(4), где Kf)--PUU Q),Pt4r-H-tnVQ- - -функциираспределения случайных величин Т,фи сосоответственно. Таким образом, оптимальное значение величины ограниченного ресурса R на нейтрализацию возмущений в сис теме определяется из условия обеспечения наибольшего значения выражения (3) , т.е. .. R -argrwQxVD-P СТПФЖ -Р Ст Л Н-) ; HH Йредлаз аемая математическая модель может быть легко реализована аппаратур но. На чертеже приведена блок-схема предлагаемого устройства. Устройство содержит первый блок 1 .нелинейностей реализующий Функцию :Р (Т) , второй блок 2 нелинейностей, реализующий функцию RH f( третий блок 3 нелинейностей, реализующий Функцию (R) , первый сумматор 1,.блок 5 умножения, датчик б ресурза на функционирование сложной систе мы, второй сумматор 7, датчик 8 ресу са на нейтрализацию возмущаквдих воздействий, блок 9 деления, четвертый блок 10 нелинейностей, реализующий {ункцию Р{ТП), третий сумматор 11, первый регистр 12 сдвига, элемент 13 сравнения, второй регистр 14 сдвига, элемент И 15, индикатор 16. Устройство работает следующим образом. В процессе функционированиясложной системы на нее воздействуют различные возмущения, которые во втором блоке 2 нелинейностей преобразуются в соответствующее значение величины ограниченного ресурса, необходимого для нейтрализации этих возмущений, которое поступает в третий блок 3 не линейностей, реализующий случайное значение времени полезного функциони рования Тцф сложной системы в услови ях возмущений, а четвертом блоке 10 нелинейностей реализуется значение функции распределения Р (Т5,ф) случайной величины Трф. Эта величина Р(1 поступает на первый вход первого сум матора 4 и вычитается от константы , поступающей на второй вход су матора 4, с выхода сумматора 4 величина 1 -.Р(Т) поступает на второй вход блока 5 умножения; Одновременно с датчикё б расхода ресурса на функционирование сложной системы случайное значение ресурса поступает на второй вход второго сумматора 7, на первый вход которого поступает с дат чика 8 расхода ресурса значение на нейтрализацию возмущающих воздействи величины ресурса R. На втором сумматоре 7 вычисляется значение величины ресурса, предназначенного на полезное функционирова-т, ние сложной системы в условиях возмущений. Это значение величины ресурса поступает на первый вход блока 9 деления, где происходит деление на величину оС, поступающую на второй вход блока 9 и характеризующую средний расход ресурса в системе на ее полезное функционирование. Таким образом, полученное в блоке 9 случайное значение времени полезного функционирования Трф поступает в четвертый блок нелинейностей, реализующий функцию распределения РСТпф (рлучайной величины Т„ф . Значение Р(Т„ф) поступает на первьга вход третьего сумматора 11 и вычитается оТ констатны , поступающей на второй вход сумматора 4, с выхода третьего сумматора 11 величина 1-РСТпф поступает на первый вход блока 5 умножения, с выхода которого . величины - Р{Тпф)1-11 - Р(Т„) .3 i поступают на вход первого регистра 12 и на второй вход элемента 13 сравнения. При этом ранее занесенное в первый регистр значение i пересылается во второй регистр 14 и затем подается на первый вход элемента 13 сравнения. В элементе 13 сравнения после выдачи датчике 8 расхода ресурсов на нейтрализацию возмущающих воздействий -очередного значения R.срав- , ниваются между собой две величиныП и i, одна из которялх соответствует текущему значению величины 1Ц, , а другая - предшествующему Кц-. Если в результате такого сравнения окажется, 4ToUi- , то с второго выхода элемента 13 сравнения выдается управляющий сигнал датчику 8 расхода ресурса на выдачу очередного значения RH,В противном случае, т.е. . , такой сигнал выдаётся с первого выхода элемента 13 сравнения на разрешающий вход элемента И 15, и значение соответствующее оптимальному значению величины ограниченного ресурса R, предназначенного на нейтрализацию возмущающих воздействий, с выхода В через элемент И 15 поступает на индикатор 16, являющийся выходом устройства. На этом работа устройства заканчивается. Изобретение позволяет найти оптимальное значение RJJ величины ресурса для нейтрализации возмущающих воэдей ствий, что позволяет максимизировать вероятность того, что время полезного функционирования сложной систелил будет не менее заданного, при этом учитывается характер возмущающих воздействий, которым подвергается система. Определение оптимального значения величины ограниченного ресурса на нейтрализацию во змущающих воздействий с целью увеличения времении ее полезного функционирования является актуальной задачей эксп.луатации, которая, может быть решена с помощью предлагаемого изобретения. Экономический эффект от внедрения изобретения можно оценить величиной
Стоимости предотврдщеннрго ущерба за/ счет недопущения срьюа запланирован ных работ. При этом следует различать два. случая R, выбирается меньше оптимального значения R и R взят больше R. I В первом случае при Rj|; R время полезного действия (функционирования) будет меньше требуемого Q, следовательно, время простоя системы определится выражением тЦ . За время полезного функционирования система израсходует .ресурс Hf о(;Т,ф. Тогда неизрасходованной в дан.ном случае окажется величина ресурса , определяемая зависимость ДИ R Rrj0. Следовательно, при оптималЬной величине Rj , вьщеленной на , нейтрализацию возмущений, будет дополнительно получен выигрыш, определяемый Формулой s C-AR.
Другими словами,предотвращен ущерб из-за несвоевременного прекращения
4- функционирования сиетемы,равный S (здесь С - стоимость работ, совершаемых единицей ресурса). Если R K|:,I то время полезного функционирования , а время простоя системы Т Ц . случае предотвращенный ущерб выразится следующим образом S С ЛН/г. k пф величина неизрасходованного ресурса,
при этом .. ,
За счет введения дополнительных блоков второго и третьего сумматора, последовательно соединенных второго, третьего и четвертого блоков нелинейности, индикатора и датчика расхода ресурса на нейтрализацию возмущающих воздействий повышается точность устройства .
Формула изобретения
Устройство для определения запаса ресурса системы, содержащее датчик
расхода ресурса, первый блок нелинейности, первый сумматор, блок умножения, выход которого подключен непосредственно и через последовательно соединенные регистры сдвига к элементу сравнения, выход которого подключен к первому входу элемента И, и блок деления, первый :вход первого сумматора и блока деления соединены ; с входами устройства, отличающ е ее я тем, что, с целью повышения точнрсти его работы, в него введены второй и третий сумматоры, последовательно соединенные второй, третий и четвертый блоки нелинейности, инди1катор и датчик расхода ресурса на нейтрйлизацию возмущающих воздействий, выход которого подключен к второму входу элемента И и к первому входу второго сумматора, второй вход которого соединен с выходом датчика расхода ресурса, выход второго сумматора подключен к второму входу блока деления,. выход которого через первый блок нелинейности соединен с первым входом третьего сумматора, выход четвертого сумматора подключен к первому входу блока умножения, второй вход которого соединен с выходом первого сумматора, второй вход которого подключен к выходу четвертого блока нелинейности, выход элемента И соединен с индикатором, второй вход четвертого сумматора и вход первого суммато.ра соединены с входами устройства.
Источники информации, принятые во внимание при экспертизе
1 Авторское свидетельство.СССР по з.аявкГ .2716058/18-24, кл. G 07 С, 1979.
-2. Авторское свидетельство СССР по заявке 2892053/18-24, кл. G 07 С 3/10, 1980 ( прототип).
j УЗ |-. 12 Д.
г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения запаса ресурса системы | 1986 |
|
SU1310863A2 |
| Устройство для определения времени полезного функционирования системы на заданном ресурсе | 1981 |
|
SU982044A1 |
| Устройство для контроля ресурса технической системы | 1981 |
|
SU1005113A1 |
| Устройство для определения периода контроля и технического обслуживания изделия | 1982 |
|
SU1072077A1 |
| Устройство для определения ресурса системы | 1982 |
|
SU1022196A1 |
| Устройство для определения оптимального значения времени регенерации ресурса системы | 1981 |
|
SU982043A1 |
| Устройство для контроля ресурса системы | 1982 |
|
SU1032467A1 |
| Устройство для определения периода контроля и технического обслуживания изделия | 1980 |
|
SU918956A1 |
| Устройство для определения длительности цикла управления | 1987 |
|
SU1499382A1 |
| Устройство для определения периода технического обслуживания изделия | 1988 |
|
SU1536415A1 |