Изобретение относится к измерительной технике и может быть использовано в устройствах для одновременного измерения температуры и механических усилий.
По основному авт.св. № 851121 известно устройство для измерения температуры и механических усилий, содержащее два пьезорезонатора, укрепленных на упругом элементе и подключенных к двум автогенераторам, подсоединенных ко входам преобразователей частота-код,- выходы которых соединены с вычислительным блоком, подключенным к запоминающему блоку, а также элемент И, блоки сравнения и генератор тактовых импульсов, который соединен с управляющими входами преобразователей частота-код и вычислительного блока, подключенного выходами к входам блоков сравнения, к вторым входам которых подсоединены . выходы запоминающего блока, а выходь блоков сравнения подключены к входам элемента И, подсоединенного выходами к входам вычислительного и запоминающих блоков Cl.
Однако известнре стройство не обладает высоким быстродействием изза необходимости проведения большого
количества итераций для достижения требуемой точности, что особенно сказывается на краях диапазонов измеряемых сил и температуры.
Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что в устройстве для измерения температуры и механических усилий введен
10 преобраз9ватель кодов, входы которого подключены к третьему и четвертому выходам запоминающего блока, первые четыре выхода соединены с входами запоминающего блока, а пятый выход сое15динен с входом генератора тактовых импульсов.
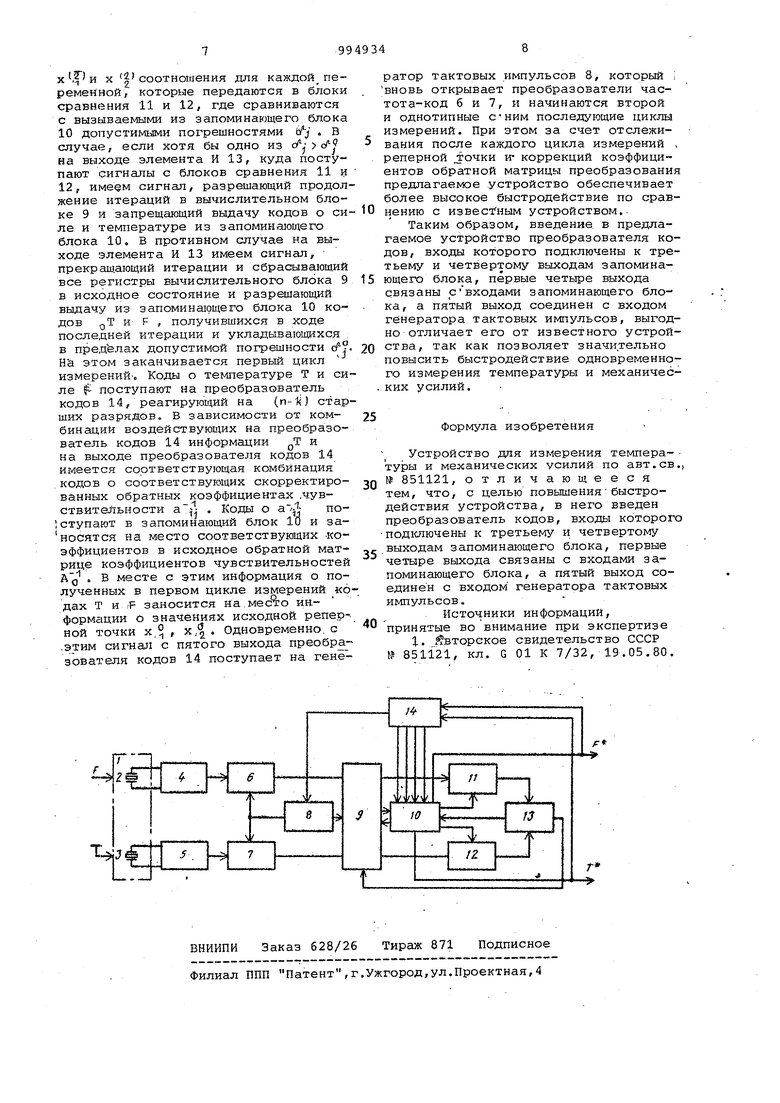
На чертеже изображена схема предлагаемого устройства.
Устройство содержит упругий эле,20мент 1, пьезокварцевые резонаторы 2 и 3, автогенераторы 4 и 5, преобрАзователи частота-код 6 и 7, генератор 8 тактовых импульсов, вычислительный блок 9, запоминающий блок 10,
25 блоки сравнения 11 и 12, элемент 13 И, преобразователь 14 кодов. Пьезокварцевые резонаторы 2 и 3 подключены к автогенераторам 4 и 5, соединенных выходами со входами преобразователей
30 .частота-код 6 и -7, выходы которых соединены с вычислительным блоком 9, подключенным входом и выходом к запоминающему блоку 10, а также генератор тактовых импульсов 8, связанный выходами с управляющими входами преобразователей частота-код 6 и 7 и вьтчислительного блока 9, подключенного выходами к первым входам блоков сравнени я 11 и 12, вторые входы которых связаны с выходами запоминающего блока 10, а выходы соединены с эле ментом И 13, подключенным выходами к третьему входу вычислительного блока 9 и второму входу запоминающего блока 10, третий и.четвертый выходы которого связаны со входами преобразо-вателя кодов 14, соединенного первыми четырьмя выходами со входами запоминэлощего блока 10, а пятым выходом - со входом генератора тактовых импульсов 8, в результате чего частоты их генерации f и f2 в зависимости от одйовременно воздействующих на упругий элемент 1 силы и температуры можно представить следующим образом
(1)
f,.,pF (2) fg K2r-K2pF ,
где К, ,i: 21 коэффициенты преобразования по температуре или коэффициенты температурной чувствительности;
K pfKjp коэффициенты преобразования по силе или коэффициенты силовой чувствительностй ;т, F измеряемые температура
и сила
Сигналы с выходов автогенераторов 4 R 5 поступают на входы преобразователей частота-код б и 7 соответственно, на выходе которых приобретают кодовую (цифровую) форму
(3)
) Э «и X ,
YI 1И 2 (4) у.2 а.„,х +32,X2
(5)
Х АХ,
где Y - вектор сигналов с преобразо-
вателей частота- од, X - вектор измеряемых параметров
(температура, сила); А матрица преобразования (матрица коэффициентов силовой и температурной чувствительност и) .
С выходов преобразователей частота-код-б и 7 сигналы поступают на вычислительное устройство 9, где происходит перемножение вектора сигналов Yна обратную матрицу коэффициентов АО , вызываемую из запоминающего устройства 10. В результате решения уравнения (5) получается первая оценка X, х, F ) одновременно действующих на чувствительный элемент температуры Т и силы F. Эти оценки Т и 5 F могут значительно отличаться от истинных значений Т и F, поскольку выбранные Коэффициенты температурной и силовой чувствительности для некоторой строго фиксированной реперной точки по силе, и температуре из диапазона измеряемых температур и сил изменяются в зависимости от того, какие в данный момент времени приняли значения измеряемые температура и сила. Причем изменения коэффициентов
температурной и силовой чувствительности лийейно зависят от изменений F и Т соответственно
а, а, i+Kf, (xj-x)
(6) °Z Cl+Kfe ()
--72L l i -: H/J )
CT+Kizlx -xg)(8)
. .а22 аЙР+к54(Хт-хо)(9)
где x,,x§ -Координаты реперной
точки ,5 х,х, - изменяющиеся (измеряемые) в данный момент времени значения темпер, ратуры и силы; К силовые коэффициенты 0 ,. термочувствительности/ К;, ,KQ2 температурные коэффициенты тензочувствительности;
а -j (,2) - значение соответствую5щего коэффициента чувствительности в реперной точке ;
.;(j-i2) - значение соответствующего коэффициента ,, ствительности при измеряемых значениях температуры и силы.
Подставляя (6) в (7), а (8) и (9) в (4) , получим
.
22
50 )У2- „,
21 «2-1 1 1 Nr .22 2/ 45
) 0-1
Очевидно, что коды частот :У-, и V2 ,|учитывают зависимость а.- и а„ от
F и 22 ° .Следовательно, при решении системы уравнений (3)(З) с постоянной матрицей преобразования h получается ошибка измере.НИИ по силе и температуре. В -известном устройстве уточнение результата, т.е. повышение точности, осуществляется путем проведения итерационных процедур с кодами частот, у к -у при постоянной матрице преобразования и фиксированной реперной точке. Осуществляется это следующим образом,. Полученное из системы,.уравнений (3)(4). решение х и служит исход ньом приближением, по которому путем подстановки в составляющие части 1, 2,3 уравнения (10) и составляющие 4, 5, 6 уравнения (11 и их соответственному переносу в правые,части корректируются коды частот v и 2 По новым значениям vJ вновь . решается система уравнений (,3)-(4| с той же постоянной матрицей преобразования А и получается новое реше ние xj- и , наосновании которог корректируются коды частот у и у и т.д. Относительная погрешность измерений по каждому измеряемому параметру после каждого следующего цикла итераций оценивается по следующему соотношений ..(Ы) Г :0-.|.|. В известном устройстве, задавая допустимые погрешности , получают ,за конечное число итераций истиннь1е :значения Т и F с требуемой точностью, однако необходимое число итераций при этом, а следовательно, быстродействие устройства ухудшается. Причем это ухудшение наиболее значительно, когда измеряемые Т и принимают значения, далекие от значений в реперной точке х° ,.)r а следовательно, когда коэффициенты а|: наиболее значительно отличаются от а.| , т.е. коэффициентов соответствующих чувствительностей в реперной точке. Устраняется указанный недостаток за счет использования эффекта плаваю щей (отслеживакхцей) реперной точки и плавающих коэффициентов чувствите льностей. Заключается он вjследующем. Первый цикл измерений осуществляется аналогично тому, как это осу1пествляется в известном устройстве. На еледующих циклах происходят следзлощие изменения. Полученные в ходе первогю цикла измерений и последующих итераций значения х и Х2 в следующем цик ле измерений становятся новой реперной точкой. Кроме этого, по полученным в первом цикле из мерений значения )с и Х2 корректируются . и значения соответствующих обратных коэффициентов чувствительностей . Таким образом, в следующем тшкле измерений мы имеем измененную (подстроенную ) реперную точку х х и уточненную обратную матрицу коэффициентов А.г ЧТО позволяет даже с учетом быстрых от цикла к циклу изменений измеряемых параметров к и х-, определять истинные значения х и х за одну две итерации. В известном . устройстве число итераций достигало четыре-пяти. По результатам укороченных итераций во втором цикле вновь подстраивается реперная тйчка и матрица коэффициентов и т.д. Реализуется эта подстройка в предлагаемом устройстве с помощью введенного преобразователя кодов 14, на вход которого попадают коды полученных значений Т и F. Причем преобразователь кодов воспринимает только (п - Ч) старших разрядов кода дТ и F , а остальные К младших разрядов выступают в качестве шага дискретизации по силе и температуре соответственно. На выходе преобразователя кодов имеются четыре кода от обратных коэффициентов чувствительности , соответствующих кодам Т и F на его входах, которые поступают в запоминающий блок 10 и заносятся на места соответствующйх коэффициентов в исходной обратной матрице коэффициентов чув.ствительностей А При этом информация на выходах запоминающего блока 10 цТ и F заносится на .место информации о значениях предыдущей реперной точки. Пятый выход преобразователя кодов 14 связан с генератором тактовых импульсов 8 и управляет его включением. Устройство работает следующим oQrразом. Воздействующие на упругий элемент 1 с резонаторами 2 и 3 температура Г и сила F приводят к изменению частот и fj автогенераторов 4 и 5. Генератор тактовых импульсов 8 синхронизирует работу преобразователей частота-код б и 7 rf вычислителя 9, открывая ПЧК на время, в течение которого может преобразоваться в код максимальная частота с выходов автогенераторов, и подготавливая вычислительный блок 9 для очередных вычислений. С выходов ПЧК 6 и 7 сигналы поступают на вычислительный блок 9, в котором происходит перемножение вектора сигналов Y на обратную матрицу коэффициентов , вызываемую,из запоминающего блока 10. После получения первого опорного решения х,х в вычислительном блоке 9 осуществляется коррекция вектора Y по аналогии, т.е. с той же матрицей А (новое решение ), значения которых поступают в запоминающий блок 10. Вычислительный, блок.,9 формирует по , X Iсоотношения для каждой переменной 7 которые передаются в блоки сравнения 11 и 12, где сравниваются с вызывae Iыми из запоминающего блока 10 допусти1 1ыми погрешностями . В случае, если хотя бы одно из ffj cf-J на выходе элемента И 13, куда поступают сигналы с блоков сравнения 11 и 12, сигнал, разрешающий продолжение итераций в вычислительном блоке 9 и запрещающий выдачу кодов о си ле и температуре из запомина ощего блока 10. В противном случае на выходе элемента И 13 имеем сигнал, прекращающий итерации и сбрасывающий все регистры вычислительнозго блока 9 в исходное состояние и разрешающий выдачу из запоминшрщего блока 10 кодов дТ и F , получившихся в ходе последней итерации и укладывающихся . в пределах допустимой погрешности f На этом заканчивается первый цикл измерений-. Коды о температуре Т и си ле f поступают на преобразователь кодов 14, реагирующий на (п-1) стар ших разрядов. В зависимости от комбинаций воздействующих на преобразователь кодов 14 информации Т и на выходе преобразователя кодов 14 имеется соответствующая комбинация кодов о соответствующих скорректированных обратных коэффициентах .чувствительности , Коды о a-j: иоступают в запоминающий блок 10 и за носятся на место соответствующих -коэффициентов в исходное обратной матрицу коэффициентов чувствительностей AJ . В месте с этим информация о полученных в первом цикле измерений ко дах т и р заносится на.место информации о значениях исходной реперной точки х.° , х,. Одновременно, с .этим сигнал с пятого выхода преобразователя кодов 14 поступает на генератор тактовых импульсов 8, который i вновь открывает преобразователи частота-код б и 7, и начинаются второй и однотипные с-ним последующие циклы измерений. При этом за счет отслеживания после каждого цикла измерений , реперной точки и- коррекций коэффициентов обратной матрицы преобразования предлагаемое устройство обеспечивает более высокое быстродействие по сравнению с известным устройством.. Таким образом, введение в предлагаемое устройство преобразователя кодов, входы которого подключены к третьему и четвертому выходам запоминающего блока, первые четыре выхода связаны свходами запоминающего блока, а пятый выход соединен с входом генератора тактовых импульсов, выгодно отличает его от известного устройства, так как позволяет значительно повысить быстродействие одновременного измерения температуры и механических усилий. Формула изобретения Устройство для измерения темпера-туры и механических усилий по авт.св. № 851121, отличающееся тем, что, с целью повышениябыстродействия устройства, в него введен преобразователь кодов, входы которого -под слючены к третьему и четвертому выходам запоминающего блока, первые четыре выхода связаны с входами запоминающего блока, а пятый выход соединен с входом генератора тактовых импульсов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 851121, кл. G 01 К 7/32, 19 . 05.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения температурыи МЕХАНичЕСКиХ уСилий | 1979 |
|
SU851121A1 |
| Устройство для измерения температуры и механических усилий | 1982 |
|
SU1045006A1 |
| Устройство для одновременного измерения температуры и давления в локальном объеме измерительного поля | 1985 |
|
SU1307246A1 |
| Устройство для одновременного измерения температуры и давления в локальном объеме измерительного поля | 1986 |
|
SU1428947A2 |
| Устройство для одновременного измерения температуры и механических усилий | 1982 |
|
SU1015267A1 |
| Пьезоэлектрический преобразователь | 1984 |
|
SU1262307A1 |
| Устройство для измерения температуры и механических усилий | 1981 |
|
SU998874A1 |
| Пьезорезонансный датчик силы и температуры | 1983 |
|
SU1107015A1 |
| Пьезоэлектрический преобразователь | 1979 |
|
SU777482A1 |
| Дифференциальный пьезоэлектрический преобразователь | 1981 |
|
SU1008629A1 |
