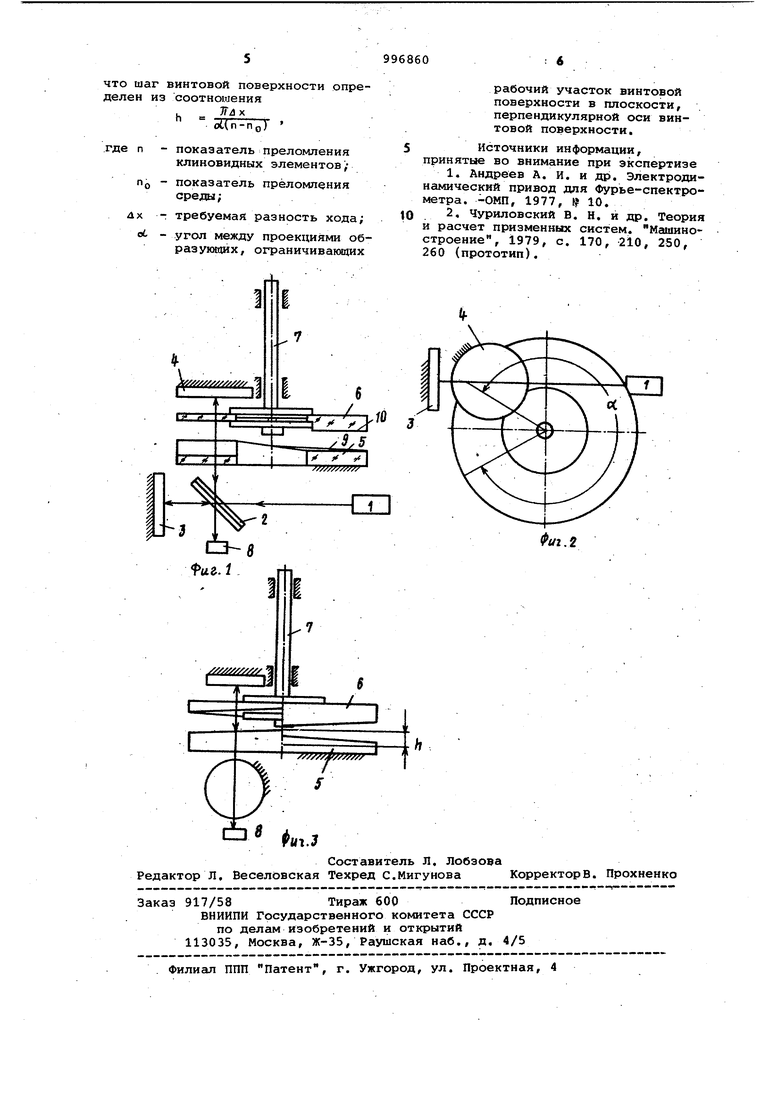
переходном режиме движения. Кроме того, воэвратно-поступательное прямолине,йное сканирование требует точ ных и сложных направляющих Элементо прямолинейного движения. Дель изобретения - повышение то ности контроля и упрощение конструк ции. Поставленная цель достигается те что в оптическом интерферометре для контроля линейных перемещений объекта, содержащем последовательно расположенные источник излучения, светоделитель, делящий световой поток на две ветви, установленное в одной ветви зеркало, установленные в другой ветви зеркало и компенсато разности хода, вып9лненный в виде подвижного инеподвижного клиновидных элементов с преломляющими повер ностями, и приемное устройство, пре ломляющие поверхности клиновидных элементов выполнены в виде винтовых поверхностей с -образующими, перпендикулярными оси винтовой поверхност а подвижный клиновидный элемент установлен с возможностью вращения вокруг этой оси. Шаг винтовой поверхности определен из соотнсипения . Лдх ot(n-no - показатель преломления кли новидных элементов) Пр - показатель преломления сре ды; Дх - требуемая разность хода ot - угол между проекциями обра зующих, ограничивающих рабочий участок винтовой по верхности в плоскости, пер пендикулярной оси винтовой поверхности. На фиг. 1 изображен оптический интерферометр для контроля линейных перемещений объекта, общий вид; на фиг. 2 - то же, вид сверху; на фиг.3 то же, вид слева. Интерферометр содержит последова тельно расположенные источник 1 из лучения и светоделитель 2, делящий световой поток на две ветви, устано ленное в одной ветви зеркало 3, установленные в другой ветви зеркало и компенсатор разности хода, выполненный в виде неподвижного клиновидного элемента 5 и подвижного клиновидного элемента б, установленного на оси 7, имекядей возможность вращения, и приемное устройство 8. Прелом ляющие поверхности клиновидных элементов 5 и б выполнены в виде винтовых поверхностей. Образующие 9 и 10 винтовых поверх ностей клиновидных элементов 5 и 6 перпендикулярны оси 7 вращения, сами винтовые поверхности обращены друг к другу. Интерферометр работает следующим образом. Луч света от источника 1 излучения делится с помощью светоделителя 2 на два луча, которые, отражаясь от зеркал 3 и 4, интерферируют, что регистрируется с помощью приемного устройства 8. Один из лучей проходит через клиновидные элементы 5 и 6. При враще нии клиновидного элемента 6 меняется суммарная толщина клиновидных элементов 5 и 6 и, тем самым, меняется длина оптического пути в этой ветви интерферометра. Шаг в винтовой поверхности определяется исходя из заданной разности хода лучей (ах) и определен из выгаеуказанного соотношения. Таким образом, предложенный интерферометр позволяет упростить конструкцию, повысить точность контроля и быстродействие и уменьшить энергопотребление. Все это достигается заменой возвратно-поступательного движения равномерным врараательным движением без реверса клиновидного элемента. В этом случае имеет место установившийся режим равномерного вращательного движения, что обеспечивает возможность сканирования с весьма широким диапазоном скоростей. При этом в качестве направляющих используются простые по конструкции и хорошо зарекомендовавшие себя опоры вращения (например, серийно выпускаемые подшипники). Формула изобретения Оптический интерферометр для контроля линейных перемещений Объекта, содержащий последовательно расположенные источник излучения, светоделитель, делящей световой поток на две ветви, установленное в одной ветви зеркало, установленные в другой ветви зеркало и компенсатор разности хода, выполненный в виде подвижного и неподвижного клиновидных элементов с преломляющими поверхностями, и приемное устройство, отличающийся тем, что, с целью повышения точности контроля и упрощения конструкции, преломляющие поверхности клиновидных элементов выполнены в виде винтовых поверхностей с образующими, перпендикулярными оси винтовой поверхности, а подвижный клиновидный элемент установлен с возможностью вращения вокруг этой оси. 2. Оптический интерферометр по п. 1, отличающийся тем.
что шаг винтовой поверхности определен из соотношения
7Г/а X о(,(п-по)
.где п
- показатель преломления клиновидных элементов ,
о - показатель преломления
п. среды;
лх -: требуемая разность хода;
ot - угол между проекциями образующих, ограничивающих СЬв
рабочий участок винтовой поверхности в плоскости, перпендикулярной оси винтовой поверхности.
Источники информации, принятые во внимание при экспертизе
1.Андреев А. И. и др. Электродинамический привод для Фурье-спектрометра. -ОМП, 1977, № 10.
2.Чуриловский В. Н. и др. Теория и расчет призменных систем. Машиностроение, 1979, с. 170, 210, 250, 260 (прототип). Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухлучевой интерферометр | 1980 |
|
SU932219A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АНИЗОТРОПИИ ПРОСТРАНСТВА СКОРОСТЕЙ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2498214C1 |
| Интерференционный фильтр | 1979 |
|
SU1097961A1 |
| Интерферометр для контроля вогнутых асферических поверхностей | 1990 |
|
SU1728650A1 |
| Устройство для измерения шага точных винтов | 1980 |
|
SU953452A1 |
| Интерференционное устройство для контроля линз | 1990 |
|
SU1758423A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОПТИЧЕСКИХ РАЗНОСТЕЙ ХОДА В ФОТОУПРУГИХ МАТЕРИАЛАХ | 1991 |
|
SU1808210A3 |
| Интерферометр для измерения перемещений | 1980 |
|
SU934212A1 |
| Интерферометр для измерения перемещений объекта | 1981 |
|
SU983450A1 |
| Оптико-электронное устройство контроля литейных размеров объектов | 1984 |
|
SU1241063A1 |
