Изобретение относится к промышленному рыболовству, позволяет определять плотность скоплений рыб и других объектов промысла и выполнять исследования акустических характеристик скоплений рыб в зависимости от их вида, размера, плотности и пространственной ориентации в естественной среде обитания.
Применяемые гидроакустические измерительные системы (ГИС) для количественной оценки рыбных скоплений измеряют энергию эхосигналов и калибруются в единицах плотности скопления рыб гидроакустическим способом или при помощи подводных средств наблюдения (визуальные наблюдения, фотографирование, телевидение). Существующие способы калибровки обладают следующими недостатками.
При гидроакустическом способе калибровки показаний ГИС за основу берется средняя сила цели единичных рыб, предварительно измеренная на разреженных скоплениях и затем распространяемая на все виды скоплений в предположении, что пространственная ориентация рыб в скоплении сохраняется постоянной и не зависит от сезона и времени суток. Исследованиями установлено, что ориентация рыб меняется и в зависимости от ориентации меняется сила цели рыб и энергия эхосигналов от скопления рыб одной и той же плотности (в 2-3 раза), что приводит к грубым ошибкам при определении запасов рыб.
Способ калибровки показаний ГИС с помощью буксируемых за судном подводных средств наблюдения, позволяющих определять вид, размер, ориентацию и плотность скопления рыб, также не эффективен, так как акустическое зондирование выполняется непосредственно под судном, а подводное наблюдение - на значительном расстоянии от судна ( более 100 м), т. е. акустическое зондирование и наблюдение производится не одного и того же объема скопления во времени и пространстве, что также может привести к грубым ошибкам.
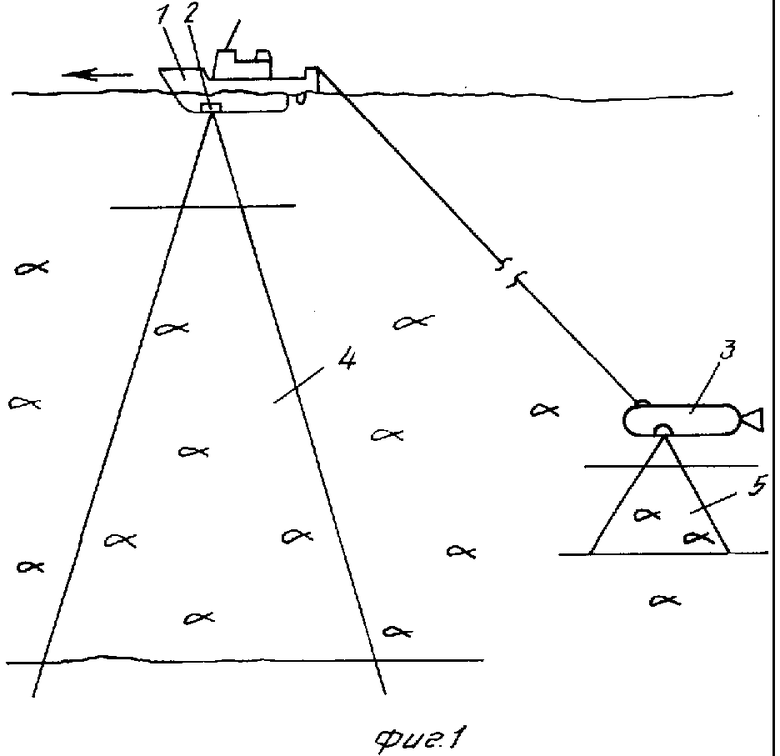
Наиболее близким к заявляемому по своей сущности является способ калибровки ГИС при помощи подводной телевизионной станции (ПТС), буксируемой за судном. Недостатки этого способа, отмеченные выше, поясняет фиг. 1, на которой изображены судно 1 с бортовой гидроакустической системой 2 и буксируемой телевизионной станцией 3. Рабочий объем 4, облучаемый гидроакустической системой, не совпадает во времени и пространстве с рабочим объектом 5 телевизионной станции.
Целью изобретения является повышение точности учета объектов промысла.
Цель достигается тем, что одновременно с измерением акустических характеристик рыбного скопления с помощью ГИС производится определение его плотности с помощью ПТС, причем обе системы по сравнению с прототипом получают информацию из одного и того же объема воды и строго синхронно. Это гарантирует получение как гидроакустических характеристик, так и данных о плотности от одних и тех же экземпляров рыб при одном и том же их положении относительно гидроакустической антенны, и, следовательно, позволяет существенно повысить точность калибровки - определения зависимости акустических характеристик от плотности.
Известны подводные телевизионные системы в рыбном хозяйстве, которые можно использовать совместно с гидроакустическими измерительными системами для калибровки показаний ГИС. Но совместное использование известных ПТС и ГИС обладает двумя существенными недостатками: первый - рабочие объемы, облучаемые соответственно ГИС и ПТС, могут существенно отличаться между собой; второй - ни в ГИС, ни в ПТС нет синхронизации их совместной работы. В результате определение плотности скопления рыб и гидроакустические измерения выполняются не от одних и тех же экземпляров рыб и калибровка показаний ГИС является некорректной.
Целью изобретения является устранение указанных недостатков и повышение эффективности комплексного видеоакустического устройства.
Цель достигается тем, что в известных телевизионной и гидроакустической системах, объединяемых в одно видеоакустическое устройство, согласно изобретению, во-первых, гидроакустическая (ГА) антенна и стереотелевизионная (СТВ) камера размещаются на общем буксируемом носителе, их параметры и расположение выбираются так, что рабочие объемы ГА-антенны и СТВ-камеры максимально перекрываются друг с другом, и, во-вторых, введен блок синхронизации измерений параметров эхосигналов в гидроакустической измерительной системе и плотности скоплений на видеоизображении в телевизионной измерительной системе.
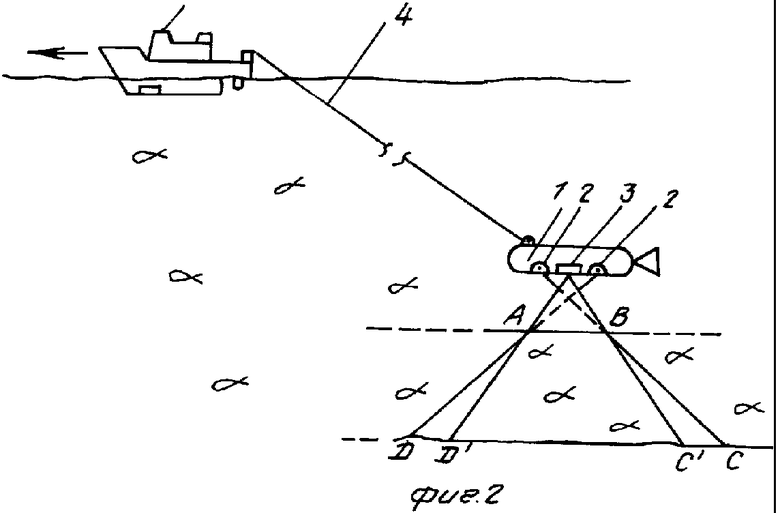
Фиг. 2 и фиг. 3 поясняют предлагаемые способ и устройство. На фиг. 2 на общем буксируемом носителе 1 размещаются СТВ-камера 2 и ГА-антенна 3, соединенные с бортовой аппаратурой кабель-тросом 4, ГА-антенна размещается между стереопарой СТВ-камеры. АВСD - сечение рабочего объема СТВ-камеры, АВСl Dl - сечение рабочего объема ГА-антенны. Параметры СТВ-камеры и ГА-антенны выбираются такими, чтобы рабочий объем, облучаемый ГА-антенной, максимально приближался к рабочему объему СТВ-камеры, но не выходил за пределы этого объема. Плотность объектов на видеоизображении определяется только в рабочем объеме, облучаемом ГА-антенной.
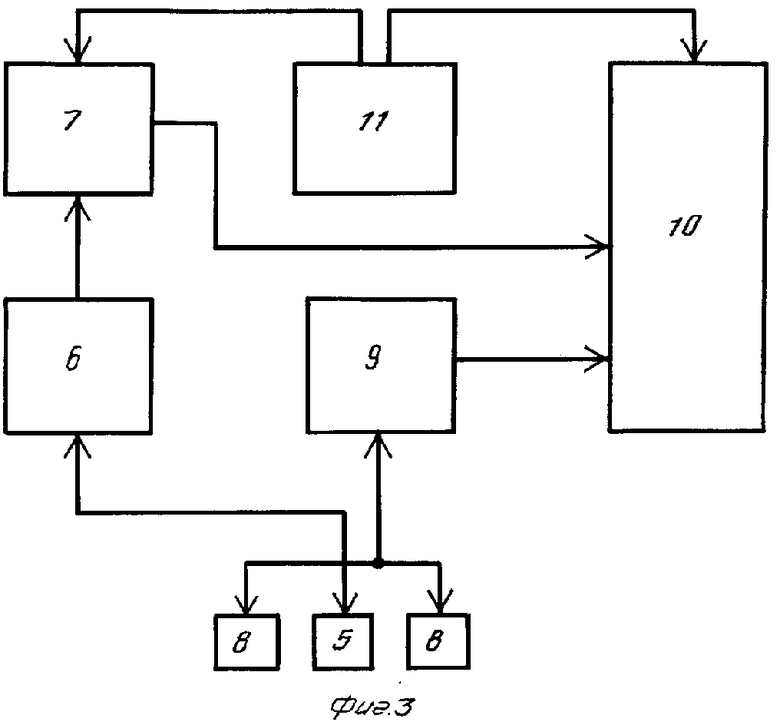
На фиг. 3 видеоакустическое устройство состоит из гидроакустической аппаратуры, включающей в себя последовательно соединенные антенну 5, эхолот 6 и эхоинтегратор 7; стереотелевизионной аппаратуры, включающей в себя последовательно соединенные стереотелекамеру 8 и приемник 9 видеосигналов; устройства 10 регистрации и обработки акустической и видеоинформации, сигнальные входы которого соединены с сигнальными выходами эхоинтегратора 7 и приемника 9 видеосигналов; и вновь введенного блока 11 синхронизации измерений, два управляющих выхода которого соединены один с управляющим входом эхоинтегратора 7, другой - с управляющим входом устройства 10. В состав устройства 10 входят видеоконтрольное устройство (ВКУ), персональный компьютер (ПК), система ввода и обработки телевизионных изображений (СВОТИ), может входить и видеомагнитофон (ВМ). Антенна 5 и телекамера 8 размещены на общем носителе.
Работает устройство следующим образом.
В исходном состоянии работает эхолот 6, телевизионная аппаратура 8 и 9 и ведется видеонаблюдение на ВКУ устройства 10. При появлении рыбных скоплений оператор устанавливает в блоке 11 синхронизации режим, при котором задается определенный интервал измерений энергий эхосигналов эхоинтегратором 7 и средней плотности скопления рыб в исследуемом слое видеограмметрическим методом при помощи устройства 10. В конце интервала измерений измеренная за ряд посылок энергия эхосигналов и количество посылок эхолота регистрируются в эхоинтеграторе 7 на видеомагнитофоне устройства 10. В этом же временном интервале выполняется обработка видеоизображений в устройстве 10 видеограмметрическим методом, определяется количество объектов в каждом кадре, объем осмотренного пространства и средняя плотность скопления, величина которой вводится в ПК и сопоставляется с энергией эхосигналов. Такая обработка выполняется в режиме реального времени в устройстве 10 системой ввода и обработки телевизионных изображений СВОТИ и ПК. При отсутствии СВОТИ и ПК используется видеомагнитофон, записанные в интервале измерений видеоизображения воспроизводятся, видеограмметрическая обработка производится вручную и не в режиме реального времени.
На видеоизображениях видеограмметрическим методом определяется плотность скопления рыб, их видовая и размерная идентификация и пространственная ориентация относительно ГА-антенны. Эти синхронные измерения обеими системами повторяются несколько раз, сопоставляются результаты измерений, определяется коэффициент калибровки показаний ГИС. Такое сопоставление выполняется всякий раз, когда изменяется характер скопления рыб (их вид, размер, ориентация, например, в зависимости от времени года или суток) и определяются соответствующие коррективы для коэффициента калибровки показаний ГИС. Таким образом, предлагаемый телевизионный способ и устройство калибровки показаний гидроакустической измерительной системы эффективнее по сравнению с известными прототипами. (56) Аверкаев В. П. Судовые рыбопоисковые и электронавигационные приборы. Л. : Судостроение, 1975, с. 33-35.
Шимянский С. Л. Телевидение в рыбном хозяйстве М. : Легкая и пищевая промышленность, 1983, с. 136.
Изобретение относится к промышленному рыболовству. Цель изобретения - повышение точности учета объектов промысла. Телевизионный способ калибровки гидроакустической измерительной системы заключается в получении информации из одного и того же объема воды и строго синхронно путем соответствующего расположения видеокамеры и акустической антенны. Новым в устройство для осуществления данного способа является размещение гидроакустической антенны между стереопарой стереотелевизионной камеры на общем носителе и введение блока синхронизации измерений параметров эхосигналов и плотности скопления рыб на видеоизображении. Устройство содержит антенну, эхолот, эхоинтегратор, стереотелекамеру, приемник видеосигналов, устройство регистрации и обработки акустической и видеоинформации и блок синхронизации измерений. 2 с. п. ф-лы, 3 ил.
