Способ калибровки (градуировки) гидроакустической измерительной аппаратуры при оценке рыбных запасов с помощью телевизионной аппаратуры и устройство для его осуществления
Предлагаемое изобретение относится к промышленному рыболовству и предназначено для использования на рыболовных научно-исследовательских и рыбопромысловых судах для оценки запасов рыбы и других объектов лова.
Гидроакустические измерительные системы (ГИС), применяемые для количественной оценки рыбных концентраций, должны обязательно калиброваться, или градуироваться гидроакустическим способом или при помощи средств подводного наблюдения (визуальных наблюдений, фотографирования, телевизионных) [1]. Одним из основных этапов калибровки является определение отражательной способности (силы цели) единичного объекта (рыбы) [2]. Существующие способы калибровки показаний ГИС обладают следующими недостатками.
При гидроакустическом способе калибровки показаний ГИС за основу берется средняя сила цели единичных рыб, предварительно измеренная на разреженных скоплениях и затем распространяемая на все виды скоплений в предположении, что пространственное положение рыб в скоплении сохраняется постоянным и не зависит от сезона и времени суток. В то же время исследованиями установлено, что ориентация рыб меняется и в зависимости от этого изменяется сила цели рыб в больших пределах (в 2-3 раза), что приводит к грубым ошибкам при определении запасов рыб [1]. Как указывается в работе [3],... "значительные ошибки могут возникать и из-за того, что размерный состав рыб определяется из анализа улова, который по этому признаку всегда отличается от реального скопления". Кроме того, при этом не учитывается возможное влияние когерентной составляющей, обусловленной тем, что, как показали исследования, скопления рыб в естественном состоянии представляют не однородную массу, а совокупность малых элементарных стай численностью 2-9 рыб. Элементарные стаи с упорядочной структурой обнаружены в косяках всех типов [4]. Это, естественно, приводит к дополнительным погрешностям при оценке запасов рыб.
Способ калибровки показаний рыб с помощью буксируемых за судном подводных средств наблюдения, позволяющих определять размер, расстояние между рыбами, их положение, также не эффективен, так как акустическое зондирование выполняется непосредственно под судном, а подводное наблюдение - на значительном расстоянии от судна [1, 5], т.е. не одних и тех же рыб и стай рыб, что также приводит к ошибкам.
Наиболее близким к заявляемому является способ калибровки показаний ГИС с помощью подводных телевизионных систем (ПТС), заключающийся в том, что гидроакустическое озвучивание рыб и их видеонаблюдение производятся одновременно и из одной точки [1]. Недостатки его заключаются, во-первых, в сложности определения на необходимом для анализа и обработки значительном количестве видеоизображений размеров и пространственного положения рыб при большом одновременном их количестве в зоне обзора телевизионной камеры, что приводит к дополнительным погрешностям оценки, особенно в отношении рыб, находящихся на периферийных участках просматриваемой области видеонаблюдения. Во-вторых, данный способ не позволяет учитывать наличие когерентных составляющих, что негативно влияет на результаты и точность калибровки.
Целью предлагаемого изобретения является повышение точности и достоверности учета объектов промысла.
Поставленная цель достигается тем, что при одновременной из одной точки акустической локации посредством ГИС и с помощью ПТС синхронно просматриваемых участков водной среды в процессе движения носителя датчиков ГИС и ПТС производятся раздельный селективный отбор и накопление видеокадров отдельных рыб и стай рыб, соответствующих моментам отражения от них максимальных эхосигналов при пересечении отдельных рыб и стай рыб зоной действия ГИС, формируемых в момент пересечения центральным поперечным сечением зоны действия ГИС центров эквивалентных шаров, равных по отражательной способности отдельным конкретным рыбам или стаям рыб, одновременное синхронное накопление указанных эхосигналов максимальной интенсивности, корректировка накапливаемых последовательностей максимальных эхосигналов по данным обработки отселектированных видеоизображений для исключения ошибочных или неверных показаний и осуществляется селективный раздельный отбор и накопление по результатам обработки отселектированных последовательностей видеокадров максимальных эхосигналов от отдельных рыб и стай рыб, пересекаемых частью зоны действия ГИС, находящейся вблизи ее оси, с учетом пространственного положения, размеров отдельных рыб и их видов, а также количества рыб в стаях.
В результате обеспечивается получение ряда последовательностей максимальных эхосигналов от отдельных рыб при вертикальном или близком к нему направлению их озвучивания, сгруппированных с учетом пространственного положения рыб, их размеров, вида с синхронными видеоизображениями, последовательности максимальных эхосигналов от стайных рыб при тех же направлениях лоцирования с учетом количества рыб в элементарных рассеивающих объемах также с синхронными видеокадрами.
После их статистической обработки могут быть получены более качественные, достоверные и точные данные как о реальной отражательной способности объектов непосредственно во время их количественной оценки, средней силе цели, о степени влияния положения рыб в обследуемых скоплениях на среднюю отражательную способность, их размерном распределении, о доле вклада когерентной составляющей и других характеристиках рыбных скоплений, которые позволяют выполнить более объективную и точную калибровку ГИС.
Существующие совместно используемые акустические и телевизионные системы не позволяют получить достаточно качественные и корректные данные о характеристиках рыбных скоплений для точной и объективной калибровки ГИС [1, 5]. Наиболее близкое к предлагаемому совмещенное видеоакустическое устройство [1] также имеет существенные недостатки. Оно характеризуется значительной сложностью системы обработки телевизионных изображений в связи с необходимостью анализа и обработки большого количества видеокадров с большим количеством рыб в зоне видеообзора. Это приводит к дополнительным погрешностям при калибровке. Декларируемое в нем равенство рабочих объемов ГИС и стереотелевизионной камеры практически не может быть обеспечено в связи с тем, что как ширина, так и протяженность зоны действия ГИС зависит от отражательной способности рыб, характера скоплений, который в реальных ситуациях оценки запасов зачастую весьма изменчив, а зона видеообзора зависит от прозрачности воды, от наличия и количества имеющегося в ней планктона и других микроорганизмов. Это обусловливает дополнительные погрешности калибровки ГИС.
Целью предлагаемого изобретения является устранение указанных недостатков и повышение эффективности комплексного видеоакустического устройства.
Поставленная цель достигается тем, что известное объединенное видеоакустическое устройство, включающее гидроакустическую антенну (ГА) и стереотелевизионную (СТВ) камеру, размещенные на общем буксируемом носителе и обеспечивающие акустическое лоцирование водной среды и видеонаблюдение тех же ее участков из одной точки, блок обработки и хранения данных, согласно предлагаемому изобретению снабжено блоком раздельного селективного отбора видеокадров отдельных рыб и стай рыб, соответствующих моментам отражения от них максимальных эхосигналов при пересечении отдельных рыб и стай рыб зоной действия ГИС, а именно, формируемых в момент пересечения центральным поперечным сечением зоны действия ГИС центра эквивалентного шара, равного по отражательной способности данной отдельной рыбе или стае рыб, блоком коррекции и селективного раздельного отбора и накопления (по результатам обработки отселектированных последовательностей видеокадров) максимальных эхосигналов от отдельных рыб и стай рыб, принятых в процессе пересечения объектов частью зоны действия ГИС, находящейся вблизи ее оси, с учетом пространственного положения, размеров отдельных рыб и их видов, а также количества рыб в стаях, и блоком промежуточного хранения групп видеокадров.
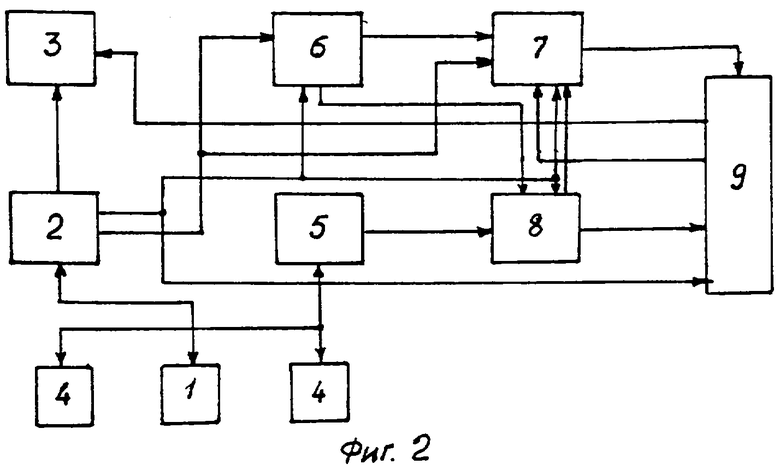
Фиг.1 и 2 поясняют, соответственно, предлагаемые способ и устройство. На фиг.1 показана схема формирования трасс эхосигналов от отдельных рыб и стай рыб, пересекаемых различными участками эоны действия ГИС в процессе движения буксируемого носителя: а - зоны действия ГИС и СТВ-камеры, 1 - местонахождения ГА-антенны и СТВ-камеры, 2 - зона действия СТВ-камеры, 3 - зона действия ГИС, 4 - центральное поперечное осевое сечение зоны действия ГИС, 5 - ось зон действия ГИС и ПТС, 6 - отдельные рыбы, 7 - стаи рыб, 6 - формы совокупностей эхосигналов от отдельных рыб и стай рыб при пересечении их зоной действия ГИС, 8, 9, 10 - формы совокупностей эхосигналов от отдельных рыб, пересекаемых соответственно частью зоны действия ГИС вблизи оси, частью зоны, находящейся в стороне от оси, и крайним участком зоны действия, 11, 12 - формы совокупностей эхосигналов от стай рыб, пересекаемых соответственно частью зоны действия ГИС вблизи оси и частью зоны, находящейся в стороне от оси, 13 - минимальная дистанция до объекта, 14 - расстояния до первых отраженных от объектов эхосигналов.
На фиг.2 видеоакустическое устройство состоит из гидроакустического тракта, включающего последовательно соединенные акустическую антенну 1, генераторно-приемный блок ГИС 2 и эхоинтегратор 3, видеотракта, включающего последовательно соединенные стереотелекамеру 4 и приемник видеосигналов с видеоконтрольным устройством (ВКУ) 5, блока 6 раздельного селективного отбора видеокадров отдельных рыб и стай рыб, соответствующих моментам отражения от них максимальных эхосигналов при пересечении отдельных рыб и стай рыб зоной действия ГИС, блока 7 коррекции и селективного раздельного отбора (по результатам обработки отселектированных последовательностей видеокадров), а также накопления максимальных эхосигналов от отдельных рыб и стай рыб, принятых в процессе пересечения объектов частью зоны действия ГИС, находящейся вблизи ее оси, блока 8 промежуточного запоминания видеоизображений, и блока 9 обработки, хранения и регистрации акустической и видеоинформации, причем вход блока 6 соединен с сигнальным выходом блока 2, выходы блока 6 подключены ко входам блоков 7 и 8, второй вход которого соединен с выходом приемника 5, выходы блока 8 соединены с блоком 7, входы синхронизации блоков 6, 7, 8 подключены к выходу сигналов запуска блока 2, выходы блока 7 и другие выходы блока 8 подключены ко входам блока 9 обработки и хранения данных, выходы которого соединены с эхоинтегратором 3 и блоком 7.
Работа устройства происходит следующим образом. В исходном состоянии работают генераторно-приемный блок 2, через акустическую антенну 1 излучаются зондирующие импульсы, принимаются блоком 2 и интегрируются эхоинтегратором 3 отраженные от рыбы эхосигналы в интервале глубин, установленном оператором, а также ведется видеонаблюдение на ВКУ блока 5. С выхода приемного тракта блока 2 эхосигналы также поступают на вход блока 6. Он включает селектор длительности принятых эхосигналов раздельно для одиночных рыб и стай рыб, схемы автоматического слежения за отселектированными эхосигналами от отдельных рыб и стай рыб при синхронизации по импульсам запуска генератора блока 2, схемы сравнения амплитуд принимаемых эхосигналов и их отстояния от акустической антенны 1, схемы фиксации моментов перехода интенсивностей отселектированных эхосигналов через максимум и их расстояний от антенны, через минимум, формирователь сигналов управления для фиксации в блоке 9 обработки и накопления выделенных в блоке 8 видеокадров, соответствующих моментам отражения от рыб максимальных отраженных акустических колебаний. Со второго выхода блока 2 сигналы запуска его генератора также поступают на входы синхронизации блоков 6, 7 и 8. После выделения селектором блока 6 первого эхосигнала от одиночной рыбы или стаи рыб (т.е. находящегося в пределах установленного интервала длительностей для одиночных рыб и стай рыб) указанный эхосигнал поступает на схему сравнения амплитуд отраженных акустических колебаний. По сигналу управления с селектора также начинает работать соответствующие схема автоматического слежения за эхосигналами, схема сравнения расстояний от ГА до выбранного объекта и схема фиксации моментов перехода интенсивностей отселектированных эхосигналов через максимум и их расстояний от антенны через минимум. После срабатывания селектора блока 6 с него, кроме того, поступает сигнал в блок 8 на запоминание видеокадров (видеоизображений) при синхронизации по импульсам запуска ГИС с блока 2. Принятый и отселектированный в следующем цикле лоцирования эхосигнал (второй) сравнивается по амплитуде и отстоянию от ГА с первым. Если он будет большим по амплитуде по сравнению с предыдущим и будет находиться на меньшем отстоянии от ГА, его величина сохраняется в схеме сравнения до поступления следующего эхосигнала. Если же он будет иметь меньшую амплитуду, с соответствующей схемы сравнения блока 6 подается сигнал на возвращение блоков 6 и 8 в исходное состояние до поступления нового импульса с селектора блока 6. После поступления очередного (третьего) эхосигнала большей амплитуды по сравнению со вторым сохраняется, соответственно, амплитуда третьего и т.д. При его меньшей амплитуде и большем отстоянии от ГА срабатывает схема фиксации моментов перехода интенсивностей отселектированных эхосигналов через максимум и их расстояний от антенны через минимум блока 6 (могут иметь место и вариации срабатывания указанной схемы после поступления не одного, а двух или трех очередных эхосигналов последовательно меньшей амплитуды). Сохраненное в соответствующей схеме сравнения значение предыдущей амплитуды передается в блок 7. После фиксации в блоке 6 момента перехода через максимум амплитуд принятых блоком 2 эхосигналов и через минимум дистанции до отселектированных рыб с соответствующего выхода блока 6 подается управляющий сигнал в блок 8, состоящий из двух трактов - для раздельного промежуточного запоминания видеокадров отдельных рыб и стай рыб, на фиксацию и перевод в блок 9 видеокадра, соответствующего моменту отражения от отдельной рыбы (или от стаи рыб во втором случае) максимального эхосигнала, который далее поступает в блок 9. В связи с тем, что интервал времени от начала запоминания видеоизображений в блоке 8 до момента начала отражения от выбранного селектором блока 6 объекта эхосигнала максимальной интенсивности всегда известен благодаря использованию синхроимпульсов запуска известного периода повторения и определению в блоке 6 расстояний от акустической антенны до отселектированных объектов, видеоизображение, соответствующее указанному началу отражения, всегда будет достаточно точно определено, зафиксировано и затем передано в блок 9. После этого данные с блока 8 сбрасываются (стираются) до поступления следующего сигнала с выхода селектора блока 6. Аналогично работает и второй тракт блока 8 для стай рыб.
В блоке 7 накапливаются максимальные эхосигналы, принятые от отдельных рыб и стай рыб, а в блоке 9 соответствующие им синхронные видеоизображения. По данным обработки видеоизображений в блоке 9 видеограмметрическим способом производится коррекция последовательностей максимальных амплитуд эхосигналов в блоке 7 с целью исключения неверных показаний (к примеру, когда в видеокадре в пределах заданного или выбранного интервала между рыбами оказывается больше одной рыбы и др.). Кроме того, по данным обработки видеоизображений в блоке 9 также производится выделение только тех максимальных эхосигналов, которые соответствуют рыбам или центрам стай рыб, находящимся вблизи оси акустической и оптической систем, т.е. пересекаемым частью зоны действия ГИС, находящейся вблизи ее оси (естественно, в установленных пределах, которые могут корректироваться оператором исходя из реальных характеристик рыбных концентраций в обследуемом районе). Отселектированные эхосигналы передаются в блок 9 для последующей статистической обработки и определения коэффициентов калибровки ГИС. Одновременно из блока 9 исключаются остальные видеокадры. В результате в блоке 9 будут накапливаться (за устанавливаемые оператором в зависимости от реальных ситуаций оценки запасов промежутки времени или задаваемое количество накопленных эхосигналов, достаточное для достоверной статистической обработки) последовательности эхосигналов максимальной интенсивности от отдельных рыб и стай рыб, принятых при пересечении их (объектов) частью зоны действия ГИС, находящейся вблизи акустической оси характеристики направленности акустической антенны с синхронными видеоизображениями. В блоке 9 формируется ряд последовательностей отселектированных максимальных эхосигналов, учитывающих как пространственное положение, так и размер, вид рыб, количество рыб в стаях. После их статистической обработки могут быть получены вполне достоверные и корректные данные о реальной отражательной способности объектов в обследуемых скоплениях, средней силе цели рыб, гистограммы размерного распределения и другие характеристики скоплений, которые позволяют выполнить более точную калибровку ГИС, учесть при этом степень влияния положения рыб в реальном оцениваемом скоплении на среднюю силу цели, степень влияния когерентной составляющей на результаты эхоинтегрирования ГИС. Присутствие и степень влияния когерентной составляющей определяются посредством сравнения значений максимальных эхосигналов от стай рыб с количеством рыб в стаях, оцениваемым по синхронным видеоизображениям.
При более простой системе обработки будет обеспечиваться более корректная и достоверная оценка и определение характеристик рыб и, соответственно, более точная оценка запасов. Большая автоматизация процессов набора данных и соответственно скорость определения и учета коэффициентов калибровки непосредственно в процессе проведения гидроакустической съемки облегчает работу оператора. Таким образом, предлагаемый телевизионный способ и устройство калибровки показаний гидроакустической измерительной системы эффективнее по сравнению с известными прототипами.
Источники информации
1. Ермольчев В.А., Заферман М.Л. Способ калибровки гидроакустической измерительной аппаратуры при оценке рыбных запасов с помощью телевизионной аппаратуры и устройство для его осуществления. Пат. РФ №2006200 С1, опубл. 30.01.94, бюл. №2.
2. Юданов К.И. Гидроакустическая разведка рыбы. С.Пб.: Судостроение, с.128-132.
3. Заферман М.Л. Техника подводного телевидения для учета рыб. Рыбное хозяйство, №4, с.39-41.
4. Заферман М.Л. Погрешности инструментальной оценки запасов рыб. М.: Рыбное хозяйство, №3, с.30.
5. Шимянский С.Л. Телевидение в рыбном хозяйстве. М.: Легкая и пищевая промышленность, 1983, с.136.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ГИДРОАКУСТИЧЕСКОЙ ИЗМЕРИТЕЛЬНОЙ АППАРАТУРЫ ПРИ ОЦЕНКЕ РЫБНЫХ ЗАПАСОВ С ПОМОЩЬЮ ТЕЛЕВИЗИОННОЙ АППАРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006200C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗМЕРОВ РЫБ В ПРОЦЕССЕ ИХ ПОИСКА | 2008 |
|
RU2367151C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ОБНАРУЖЕНИЯ РЫБЫ | 2004 |
|
RU2275654C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
| Устройство для подсчета рыб в потоке воды | 1985 |
|
SU1242083A1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОБРАБОТКИ РЫБОПРОМЫСЛОВОЙ ИНФОРМАЦИИ | 2015 |
|
RU2582624C1 |
| НАСТРАИВАЕМЫЙ АКУСТИЧЕСКИЙ РЕФЛЕКТОР | 2009 |
|
RU2495501C2 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА РЫБЫ В САДКАХ ПРЕДПРИЯТИЙ ИНДУСТРИАЛЬНОЙ АКВАКУЛЬТУРЫ | 2018 |
|
RU2697430C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА УЛОВИСТОСТИ ТРАЛА | 2010 |
|
RU2440589C2 |
Изобретение относится к промышленному рыболовству и предназначено для использования на рыболовных научно-исследовательских и рыбопромысловых судах для оценки запасов рыбы и других объектов лова. Технический результат заключается в повышении точности и достоверности учета объектов промысла. Способ предусматривает измерение отражательных характеристик рыб гидроакустической измерительной аппаратурой, независимое определение по видеосигналам стереотелевизионной измерительной аппаратуры размеров, пространственного положения и числа рыб при одновременном гидроакустическом озвучивании и видеопросмотре участков водной среды из одной точки, раздельный селективный отбор и накопление видеоизображений отдельных рыб и стай рыб, соответствующих моментам отражения от них максимальных эхосигналов при пересечении отдельных рыб и стай рыб, корректировка накапливаемых последовательностей максимальных эхосигналов по данным обработки отселектированных видеоизображений, селективный раздельный отбор и накопление по результатам обработки отселектированных последовательностей видеизображений максимальных эхосигналов от отдельных рыб и стай рыб. Устройство содержит гидроакустический и видео тракты, блок регистрации, обработки и хранения акустической и видеоинформации, блоки раздельного селективного отбора и накопления максимальных эхосигналов от рыб и блок промежуточного хранения видеоизображений. 2 н.п. ф-лы, 2 ил.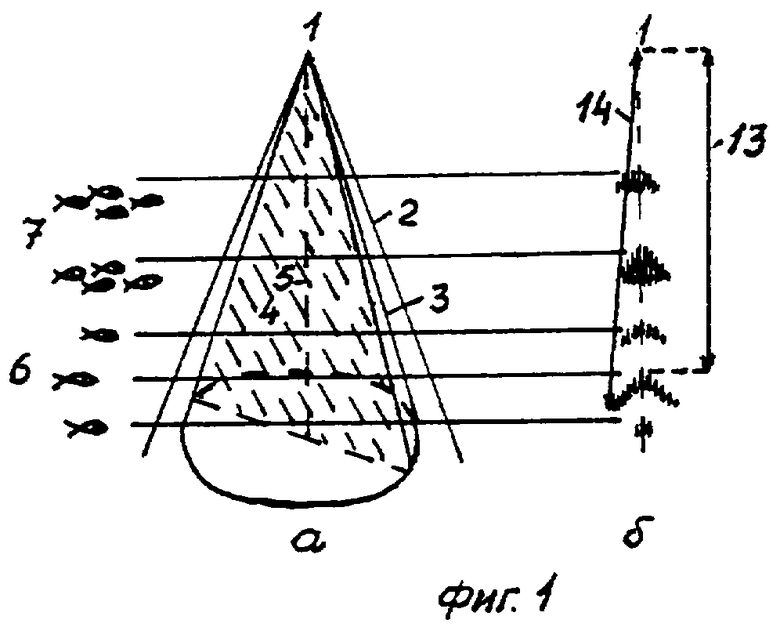
| СПОСОБ КАЛИБРОВКИ ГИДРОАКУСТИЧЕСКОЙ ИЗМЕРИТЕЛЬНОЙ АППАРАТУРЫ ПРИ ОЦЕНКЕ РЫБНЫХ ЗАПАСОВ С ПОМОЩЬЮ ТЕЛЕВИЗИОННОЙ АППАРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006200C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ КОНЦЕНТРАЦИИ РЫБ | 1996 |
|
RU2167434C2 |
| US 4879697, 07.11.1989 | |||
| JP 61272675, 02.12.1986 | |||
| JP 8043531, 16.02.1996. | |||

