Изобретение относится к приборостроению и может быть использовано в качестве устройства для автоматизации определения глубины нахождения максимально плотной части рыбных скоплений (центра плотности) и соответствующего значения плотности в условных единицах.
Известно устройство, содержащее последовательно соединенные стробирующую схему, амплитудный детектор, пороговое устройство, пиковый детек тор, а также генератор опорных импульсов, определяющие дальность до цели по величине задержки максимума отраженного сигнала относительно зондируклцей посылки ГП.
Однако максимальйая амплитуда эхрсйгнала от скопления является выборочным мгновенным значением огибаю- щей, которая может быть значительно искажена мультипликативной помехой, что может привести к получению ложных значений дистанции до цели.Кроме того, величина максимальной амплитуды эхосигнала не позволяет определить значения плотности в исследованных слоях по глубине с достаточной достоверностью.
При прицельном траловом лове для повышения,эффективности облова необходимо знать как глубину нахождения наиболее плотной части скопления, та и оценку его плотности в условных единицах.
Наиболее близким к предлагаемому по технической сущности и достигаемо1иу результату является устройство, позволяклцее получать профиль распределения относительной плотности рыбных скоплений по глубине, содержащее последовательно соединенные входную стробирующую схему, амплитудный етектор, квадратор, интегратор со схемой управления и устройство регис трации 2 J.
Недостатками этого устройства являются невозможность автоматического определения глубины залегания центра плотности рыбных скоплений и его условной, плотности, необходимость последующей обработки оператором полученных профилей распределеНИН плотности скоплений по глубине.
Цель,изобретения - повышение точмости определения глубины нахождения центра плотности рыбных скоплений путем автоматической обработки Гхосигналов.
Поставленная цель достигается тем что в устройство для определения глубины нахождения центра плотности рыбных скоплений, содержащее последовательно соединенные аналоговый ключ амплитудный детектор, квадратор, управляемый интегратор, аналого-цифровой преобразователь, а также схему управления аналоговым ключом, генератор опорной частоты, первый делитель
частоты с постоянным коэффициентом деления, цифровой индикатор, введены дешифратор, второй делитель частоты с переменным коэффициентом деления, схема формирования временных интервалов, первый и второй регистры памяти цифровой компаратор, логический элемент ИЛИ и счетчик текущей глубины, причем выходы дешифратора подключены к управляющим входам второго делителя , к счетному входу которого подключен выгяэд первого делителя, а выход второго делителя подключен к одному из входов схемы формирования временных интервалов, другой вход которой подключен к выходу первого делителя, выход схемы формирования временных интервалов подключен к управляющим входам интегратора и аналого-цифрового преобразователя, выход которого соединен с информационным входом первого регистра памяти и с одним из входов цифрового компаратора , а выход первого регистра памяти соединен с другим входом цифрового компаратора, выход которого соединен с одним из входов логического элемента ИЛИ, к другому входу которого и входам запуска схемы формирования временных интервалов, схемы управления, счетчика текущей глубины и генератора опорной частоты подключен выход схемы формирования сигнала посылки эхолота, а выход логического элемента ИЛИ соединен с входами разрешения- записи первого и второго регистров , а на информационный вход второго регистра памяти подключен выход счетчика текущей глубины, а выходы двух регистров памяти подключены к соответствующим входам цифрового индикатора.
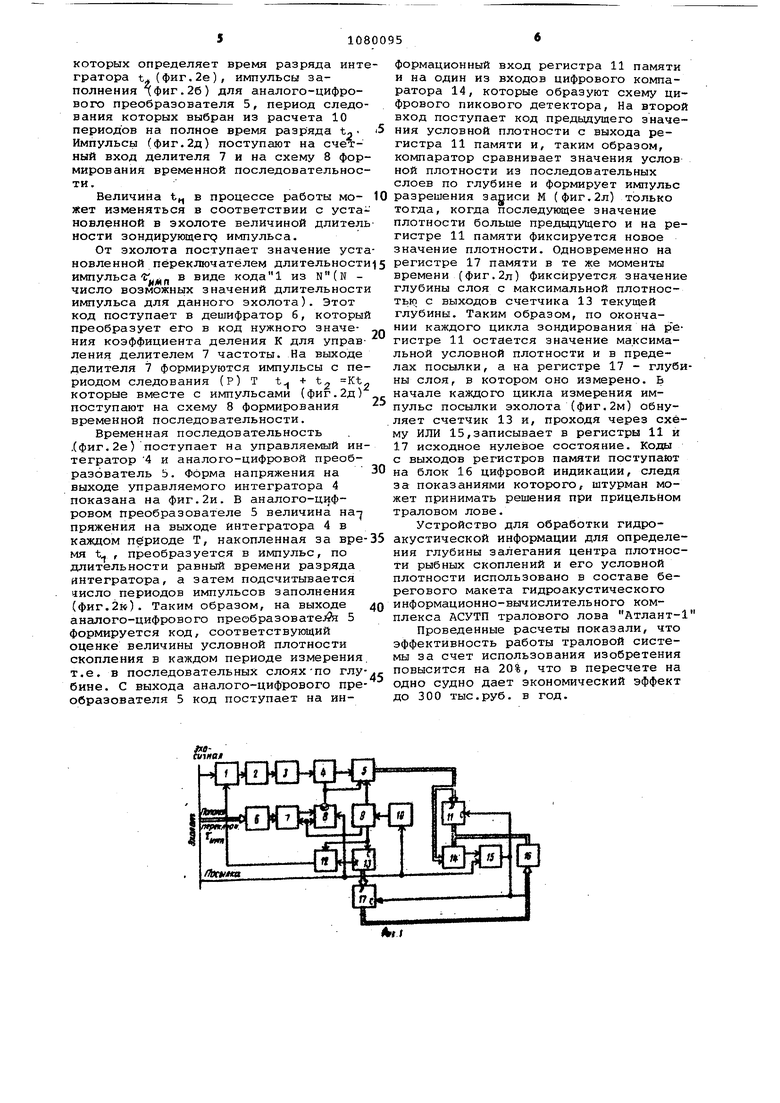
На фиг.1 представлена структурная схема предлагаемого устройства для определения глубины нахождения центр плотности рыбных скоплений; на фиг.2 временные диаграммы работы устройства.
Устройство содержит аналоговый ключ 1, амплитудный детектор 2, квадратор 3, управляемый интегратор 4, аналого-цифровой преобразователь 5, дешифратор б, делитель 7 частоты с переменным коэффициентом деления, схему 8 формирования временных интервалов, делитель9 частоты с постоянным коэффициентом деления, ге ератор 10 опорной частоты,первый и второй регистры 11 памяти, схему 12 управления, счетчик 13 текущей глубины, цифровой компаратор 14, схему ИЛИ 15 индикатор 16, регистр 17 памяти.
В устройстве последовательно соединены аналоговый ключ 1, амплитудный детектор 2, квадратор 3, управляемый интегратор 4, аналого-цифровой преобразователь 5, первый регистр 11 памяти, цифровой компаратор 14,
выход которого подключен через схему ИЛИ 15 к входам разрешения записи первого и второго регистров 11 и 17 памяти. Выход генератора 10 опорной частоты подключен к делителю 9, выходы которого подключены к аналого-цифровому преобразователю 5, входу С счетчика 13 текущей глубины, к схеме 12 управления аналоговым ключом, к делителю 7 и к схеме 8 формирования временных интервалов. Выходной код счетчика 13 текущей глубины поступает на регистр 17 памяти, выход которого подключен к одному из входов индикатора 16, к второму входу индикатора 16 подключен выход регистра 11 памяти. Импульсы со схемы формирования посылки эхолота пост пают на схему 12 управления аналоговым ключом, схему 8 формирования временных интервалов, генератор 10 опорной частоты, вход R счетчика 13 текущей глубины и на один из входов схемы ИЛИ 15. Код положения переключателя длительности импульса эхолота поступает на вход дешифратора 6, выход которого подключен к управляющему входу делителя 7 частоты, а выход делителя подключен к входу схемы 8 формирования временных интервалов.
Выход схемы 8 формирования временных интервалов подключен к.управляющим входам управляемого интегратора 4 и аналого-цифрового преобразователя 5, а выход схемы 12 управления аналоговым ключом подключен к управляющему входу аналогового ключа 1 ,
Устройство для определения глубины нахождения центра плотности рыбны скоплений работает следугацим образом
Эхосигналы с выхода усилителя эхолота поступают на амплитудный детектор 2 через-аналоговый ключ 1,, стробирующий эхосигналы в интервале времени, задаваемом схемой 12 управлени что позволяет устранить донный эхосигнал. Огибающая эхосигнала после детектора 2 поступает на квадратор 3, с выхода которого квадрат модуля огибающей, пропорциональный величине плотности скоплений,поступает на вход управляемого интегратора 4. Посылки эхолота поступают на схему 12 управления, схему 8 формирования временных интервалов, генератор 10 опорной частоты, в качестве синхроимпульса, а также на вход R счетчика 13 текущей глубины для сброса его в нулевое состояние и через схему ИЛИ 15 на входы разрешения записи регистров 11 и 17 памяти для записи в них начального нулевого состояния.
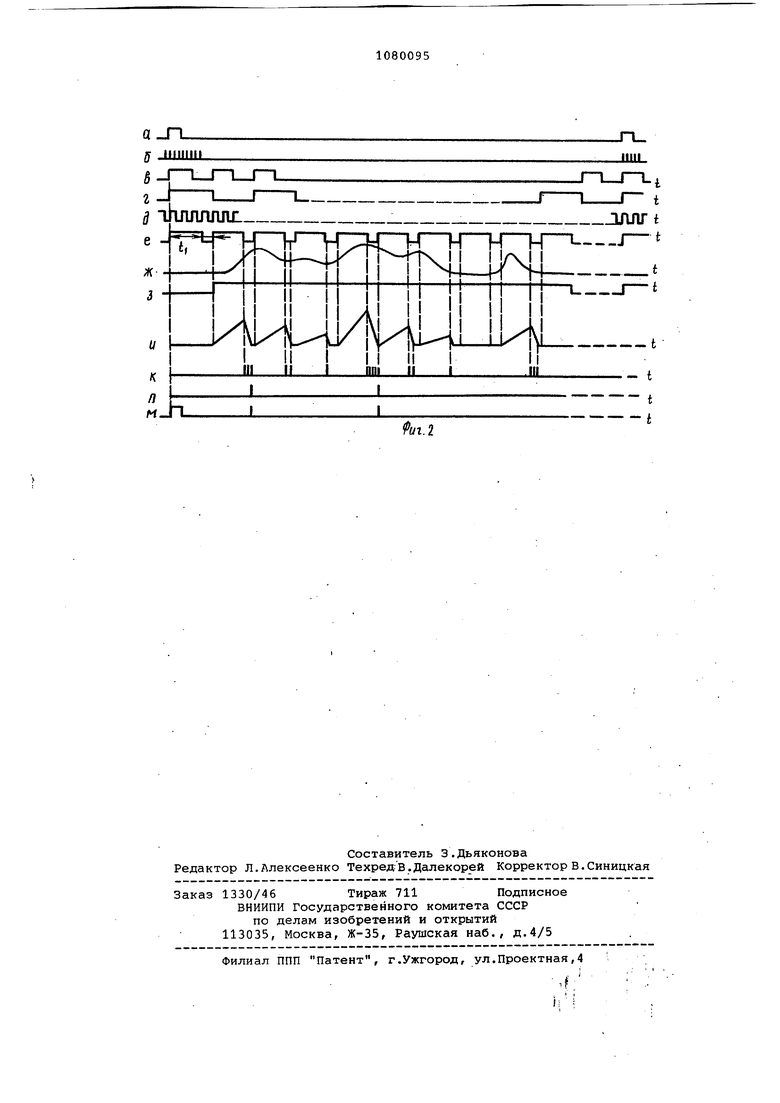
На фиг.2а показаны импульсы пось1пки эхолота; на фиг. 26 - импульсы заполнения для аналого-цифрового преобразователя 5, на фиг.2в - импульсы на выходе делителя 9 частоты; на фиг.2г - импульсы на выходе делителя 7 частоты; на фиг.2д - импульсы, период следования которых определяет время разряда управляемого интегратора 4; на фиг.2е - временная последовательность импульсов на выходе схемы 8 формирования временной последовательности импульсов/ на фиг.2ж - сигнал на выходе квадратора 3, пропорциональный значению квадрата модуля огибающей сигнала/ на фиг.2з - временной строб на выходе схемы управления аналоговым ключом 1, на фиг.2и - форма напряжения на выходе управляемого интегратора 4, на фиг.2к - число импульсов заполнения на выходе аналого-цифрового преобразователя 5; на фиг.2л - импульс разрешения записи на выходе компаратора 14, на фиг. 2м - импульс посылки эхолота, обнуляющий счетчик 13 и регистры 11 и 17 памяти.
Схема управления аналоговым ключом вырабатывает временной строб Н, в пределах которого входные эхосигналы через аналоговый ключ 1 поступ ют на амплитудный детектор 2, квадратор 3, откуда квадрат модуля огиОающей (фиг.2ж) подается на вход управляемого интегратора. На управляющий вход интегратора 4 поступает временная импульсная последовательность {фиг.2е) с периодом следования,состоящим из отрезков t и , t -время интегрирования, а t2 время разряда интегратора от источника опорного напряжения. Соотношение времени i, и t- выбирается из условия, что
cf сТ
t. должно быть /п , где - - минимальный разрешаемый эхолотом объем f - длительность импульса эхолота (1-10 м/сек), п - коэффициент (2-30) для скоплений (косяков) рыб, время разряда интегратора (время измерения должно быть Л t, чтобы при указанных длительностях эхосигналов от косяков не была значительной погрешность/ вызванная тем, что управляющая импульсная-- последовательност не синхронизирована с максимумом эхосигнала) .
Нужные для работы устройства частоты импульсов формируются с помощью делителя 9 частоты, на который поступает опорная частота от генератора 10. В задающем генераторе 10имеется схема синхронизации, осуществляющая временную привязку внешнего сигнала (импульса посылки) к опорной частоте. Делитель 9 частоты вырабатывает импульсы с частотой следования 750 Гц (фиг.2в, один период соответствует одному метру глубины) , посту пающие на счетчик 13 текущей глубины и схему 12 управления аналоговым ключом, импульсы, период следования которых определяет время разряда ин гратора г.(фиг.2е), ИМПУЛЬСЫ за7т--- . у f «4ii l у J4. полнения 1:Фиг.2б) для аналого-цифро Р«ад ед вания которых выбран из расчета 10 периодов на полное время разряда t ИМПУЛЬСЫ (ФИГ.2Д) поступают на счет ный вход делителя 7 и на схему 8 фо мирования временной последовательно ти, Величина t в процессе работы молет изменяться в соответствии с уста в эхолоте величиной длител мости зондирующегр импульса. От эхолота поступает значение уст новленной Переключателем длительност импульс а Г в виде кода из N(N число возможных значений длительност импульса для данного эхолота). Этот код поступает в дешифратор б, которы преобразует его в код нужного значения коэффициента деления К для управ ления делителем 7 частоты. На выходе делителя 7 формируются импульсы с пе риодом следования (р) т t- -ь t Kt которые вместе с импульсами (фиг.2д) поступают на схему 8 Формирования временной последовательности. Временная последовательность .(фиг.2е) поступает на управляемый интегратор 4 и аналого-цифровой преобразователь 5. Форма напряжения на выходе управляемого интегратора 4 показана на фиг.2и. в аналого-цифровом преобразователе 5 величина на-7 пряжения на выходе интегратора 4 в каждом периоде Т, накопленная за время t , преобразуется в импульс, по длительности равный времени разряда интегратора, а затем подсчитывается аисло периодов импульсов заполнения (фиг.2к). Таким образом, на выходе аналого-цифрового npeG6pa3OBaTejfe 5 Формируется код, соответствующий оценке величины условной плотности скопления в каждом периоде измерения т.е. в последовательных слоях-по глубине. С выхода аналого-цифрового преобраэователя 5 код поступает на инФормационный вход регистра 11 памяти parLTT ЦИФРОВОГО ко аратора 14, которые образуют схему ийгистра 11 памяти и, таким обраэоГ компаратор сравнивает значения SOB слоев пГ последовательных слоев по глубине и формирует импульс olnTTor тогда, когда последующее значение плотности больше предвдущего и на п гистре 11 памяти новое значение плотности. Одновременно на регистре 17 памяти в те же моменты времени (фиг.2л) фиксируется значение глубины слоя с максимальной плотностью, с выходов счетчика 13 текущей глубины, таким образом, по окончании каждого цикла зондирования на регистре 11 остается значение максимальной условной плотности и в пределах посылки, а на регистре 17 - глубины слоя, в котором оно измерено. Б начале каждого цикла измерения импульс посылки эхолота (фиг.2м) обнуляет счетчик 13 и, проходя через схему ИЛИ 15,записывает в регистры 11 и 17 исходное нулевое состояние. Коды с выходов регистров памяти поступают на блок 16 цифровой индикации, следя за показаниями которого, штурман может принимать решения при прицельном траловом лове. Устройство для обработки гидроакустической информации для определения глубины залегания центра плотности рыбных скоплений и его условной плотности использовано в составе беегового макета гидроакустического нформационно-вычислительного комлекса АСУТП тралового лова Атлант-1 Проведенные расчеты показали, что ффективность работы траловой систеы за счет использования изобретения овысится на 20%, что в пересчете на дно судно дает экономический эффект о 300 тыс.руб. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ АМПЛИТУДЬ! | 1971 |
|
SU313469A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1327135A1 |
| Устройство для контроля аналоговых объектов | 1989 |
|
SU1718189A1 |
| Устройство для контроля загрузки мельницы | 1991 |
|
SU1811898A1 |
| Анализатор сигнала тактовой синхронизации | 1988 |
|
SU1587656A1 |
| Устройство для синхронизации шумоподобных сигналов | 1982 |
|
SU1022326A1 |
| Устройство для решения задач оптимального управления | 1985 |
|
SU1270779A1 |
| Устройство для выбора частотных диапазонов передачи группового радиосигнала | 1982 |
|
SU1072277A1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ КРИТЕРИЯ ВОСПЛАМЕНЯЮЩЕЙ СПОСОБНОСТИ ИСКРОВЫХ РАЗРЯДОВ В СВЕЧАХ ЗАЖИГАНИЯ | 2000 |
|
RU2182336C2 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ НАХОЖДЕНИЯ ЦЕНТРА ПЛОТНОСТИ РЫБНЫХ СКОПЛЕНИЙ, содержащее,последовательно соединенные аналоговый ключ,,амплитудный детектор, квадратор, управляемый интегратор, аналого-цифровой преобразователь, а также схему управления аналоговом ключом, генератор опорной частоты, первый делитель частоты с постоянным коэффициентом деления и цифровой индикатор, отличающееся тем, что, с целью повышения точности определения глубины нахождения центра плотности рыбных скоплений путем автоматической обработки эхосигналов, в него введены дешифратор, второй делитель частоты с переменным коэффициентом деления, схема формирования временных интервалов, первый и второй регистры памяти, цифровой компаратор, логический элемент ИЛИ и счетчиктекущей глубины, причем выходы дешифратора подключены к управляющим входам второго делителя, к счетному входу которого подключен выход первого делителя, а выход второго делителя подключен к одному из входов схемы формирования временных интервалов , другой вход которой подключен к выходу первого делителя, выход схе1«ы формирования временных интервалов подключен к управляющим входам интегратора и аналого-цифрового преобразователя, выход которого соединен с информационным входом первого регис(Л тра памяти и с одним из входов цифрового компаратора, а выход первого регистра памяти соединен с другим входом цифрового компаратора, выход которого соединен с одним из входов логического элемента ИЛИ, к другому входу которого и входам запуска схемы формирования временных интервалов схемы управления, счетчика текущей глубины и генератора опорной частоас ты подключен выход схемы формирования сигнала посылки эхолота, а выход логического элемента ИЛИ соединен с входакш разрешения записи первого и « ел второго регистров памяти, а на инфор мационный вход второго регистра па,мяти подключен выход счетчика текущей глубины, а выходы двух регистров памяти подключены к соответс вующим цифрового индикатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дулевич В.Е | |||
| и др | |||
| Теоретические основы радиолокации | |||
| М., Сов | |||
| радио, с.318-329 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Теслер В.Д., БердичевскийЗ.М | |||
| Методы оценки плотности скоплений рыб с помощью гидроакустической рыбопоисковой техники и обработка результатов на ЭВМ | |||
| Обзорная информация, ЦНИИТЭРХ, серия 6, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
