Изобретение относится к точному приборостроению, в частности к измерению угловой скорости движения объекта с помощью гироскопических устройств.
Известен датчик угловой скорости, содержащий гиромотор с полуосями подвеса, установленный в корпусе на двух опорах подвеса, содержащий гиромотор, датчик угла, датчик момента, усилитель обратной связи, причем роторы датчика команд и датчика момента установлены на оси подвеса гиромотора, а их статоры жестко закреплены на основании прибора, выход датчика угла соединен с входом усилителя обратной связи, выход которого соединен с входом датчика момента.
Недостаток указанного устройства заключается в том, что измеряется только одна составляющая абсолютной угловой скорости движения объекта, а для измерения, например, двух взаимно перпендикулярных составляющих необходим второй прибор, что увеличивает общие габаритно-массовые характеристики и стоимость.
Цель изобретения состоит в измерении двух составляющих абсолютной угловой скорости объекта одним гироскопическим датчиком угловой скорости.
Цель достигается тем, что гиромотор установлен в опоры, функцию которых выполняют восемь датчиков преобразования механических величин в электрические (датчиков силы), причем каждая опора состоит из четырех датчиков силы и относительно каждой координатной оси диаметрально противоположные датчики включены по дифференциальной схеме, а упругие элементы датчиков образуют систему подвеса гиромотора, ось подвеса которого расположена параллельно оси вращения ротора и в частном случае может совпадать с ней, введены четыре дифференциальных усилителя, два сумматора, два аналого-цифровых преобразователя и блок вычисления составляющих угловой скорости, при этом выходы соосных датчиков силы каждой опоры попарно соединены с входами соответствующих дифференциальных усилителей, выходы дифференциальных усилителей сигналов соосных и параллельных датчиков силы одной и другой опор попарно соединены с входами соответствующих сумматоров, выходы которых через соответствующие аналого-цифровые преобразователи соединены с входом блока вычисления составляющих угловой скорости.
На фиг. 1 и 2 представлены структурная схема и конструкция устройства, где 1 - гиромотор, 2 - полуоси (цапфы), 3 - гироскопический датчик угловой скорости, 4, 5 - опоры, 6-13 - датчики преобразования механических величин в электрические (датчики силы), 14-17 - дифференциальные усилители, 18, 19 - сумматоры, 20, 21 - аналого-цифровые преобразователи, 22 - блок вычисления составляющих угловой скорости, 23 - пьезоэлектрический датчик силы, 24 - корпус пьезоэлектрического датчика силы, 25 - упругий элемент пьезоэлектрического датчика силы, 26 - пьезоэлектрический чувствительный элемент датчика силы, 27 - усилитель заряда, 28 - ось вращения ротора гиромотора, 29 - подшипник, 30 - корпус гиромотора, 31 - корпус гироскопического устройства, 32 - ограничители.
Датчики преобразования механических величин в электрические 6-13 предназначены для уравновешивания гироскопического момента, измерения гироскопических реакций и могут быть выполнены на основе любого метода измерения силы и в частном случае могут представлять собой пьезоэлектрические датчики 23 силы, которые состоят из корпуса 24, упругого элемента 25, пьезоэлектрического чувствительного элемента 26, усилителя 27 заряда.
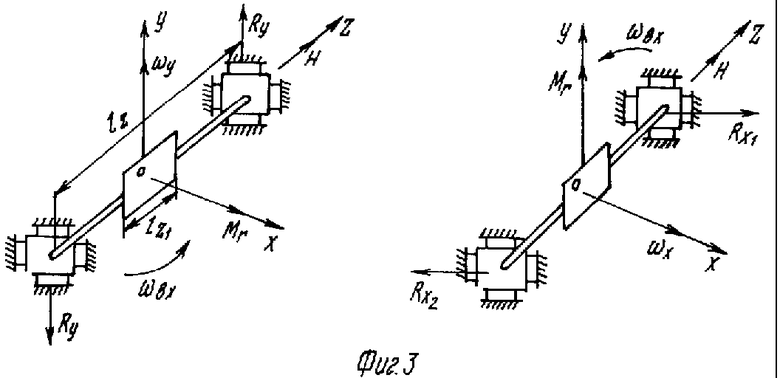
С гиромотором связана система координат XYZ, причем ось Y и ось Х перпендикулярны оси Z вращения ротора 28 и взаимно перпендикулярны между собой. Ось Y является осью чувствительности гироскопического измерителя 3 при вращении объекта в плоскости XOZ и вектор угловой скорости ωy направлен по ее оси. Ось Х также является осью чувствительности гироскопического измерителя 3, но при вращении объекта в плоскости YOZ и вектор угловой скорости ωx направлен по оси Х (см. фиг. 3). Ротор гиромотора 1 раскручен и вращается вокруг оси OZ c угловой скоростью Ωz, а его собственный кинетический момент равен Н.
При вращении объекта вместе с установленным на нем гироскопическим устройством 3 в плоскости XOZ с угловой скоростью ωвх = ωy ротор гиромотора 1 будет участвовать в сложном движении, т. е. иметь собственное вращение с угловой скоростью Ωz и переносное движение со скоростью ωвх. При этом, так как ротор вращается вокруг двух несовпадающих осей, возникает гироскопический момент Мхг, вектор которого направлен по оси ОХ, а так как угол между осями OZ и OY равен 90о, то значение гироскопического момента определяется как
Мхг = Н ωy
Гироскопический момент можно представить в виде момента пары Rylz1 силы Ry, имеющей плечо lz1, который через подшипники 29 ротора действует на корпус 30 гиромотора 1 и цапфы 2. В опорах 4 и 5 возникают силы Ry, которые и образуют на плече lz момент пары Rylz (см. фиг. 3). В рассматриваемом случае моменты пар Rylz1 и Ryl2 равны между собой и равны порождающему их гироскопическому моменту Мхг = Н ωy. Сила Ry,являясь гироскопической реакцией, воспринимается и уравновешивается упругими элементами датчиков 6 и 9 опоры 4 и датчиков 13 и 10 опоры 5. Так как датчики 6 и 9, 13 и 10 включены по дифференциальной схеме и находятся в поджатом состоянии, то сила Ry, действуя на упругие элементы датчиков 6 и 9, 13 и 10, вызывает из упругую деформацию, что приводит к деформации сжатия пьезочувствительных элементов датчиков 6 и 13 и деформации растяжения пьезочувствительных элементов датчиков 9 и 10. На основе прямого пьезоэффекта на гранях пьезочувствительных элементов датчиков 6 и 13 возникает положительный заряд Q, который усиливается усилителями заряда, и на их выходах появляется напряжение U6 и U13, пропорциональное действующей силе Ry. В то же время на основе обратного пьезоэффекта на гранях пьезочувствительных элементов датчиков 9 и 10 также возникает заряд, но противоположного знака по сравнению с датчиками 6 и 13, и на выходах датчиков 9 и 10 также появится напряжение U9 и U10, пропорциональное силе Ry.
 где К6,9,10,13 - коэффициенты датчиков 6, 9, 10, 13;
где К6,9,10,13 - коэффициенты датчиков 6, 9, 10, 13;
С6,9,10,13 - емкости обратной связи усилителей заряда датчиков 6, 9, 10, 13.
Напряжение U6 c датчика 6 подается на первый вход дифференциального усилителя 14, на второй вход которого подается напряжение U9 c датчиков 9, на выходе дифференциального усилителя 14 появится напряжение Δ U14, которое определяется, как
ΔU14= U6-U9=  -
- -
-  K14= RyK14
K14= RyK14 = RyK1 , где K1= K14
= RyK1 , где K1= K14 ;
;
К14 - коэффициент передачи дифференциального усилителя 14.
Напряжение U13 c датчика 13 поступает на первый вход дифференциального усилителя 16, на второй вход которого поступает напряжение U10, на выходе дифференциального усилителя 16 появится напряжение Δ U16, которое определяется, как
ΔU16= U13-(-U10)=  -
- -
- 
 K16= RyK2 , где K2= K16
K16= RyK2 , где K2= K16 ;
;
К16 - коэффициент передачи дифференциального усилителя 16.
Напряжение Δ U14 поступает на первый вход сумматора 18, на второй вход которого подается напряжение Δ U16, на выходе сумматора 18 будет сумма напряжений Δ U14 + +ΔU16, т. е.
Uy = Δ U14 + Δ U16 = RyK1 + RyK2 = Ry(K1 + K2).
Напряжение Uy c выхода сумматора подается на аналоговый вход аналого-цифрового преобразователя 20, которым управляет блок 22. Блок 22 в начале цикла измерения формирует команду "Сброс" элементов памяти аналого-цифрового преобразователя 20. Затем формирует команду "Пуск", после которой через интервал времени tи (времени преобразования) формирует сигнал "Опрос".
По команде "Опрос" с параллельного вывода аналого-цифрового преобразователя 20 в блок 22 записывается цифровой эквивалент (код) напряжения Uy c вывода сумматора 18, преобразованного аналого-цифровым преобразователем 20. Значение цифрового эквивалента определяется, как
Zy=  Uy, где
Uy, где  - коэффициент преобразования аналого-цифрового преобразователя 20;
- коэффициент преобразования аналого-цифрового преобразователя 20;
Δ Ny - напряжение квантования.
Учитывая, что Uy = Ry(K1 + K2), a Ry = =  и Мхг = Н ωy, получаем Zy=
и Мхг = Н ωy, получаем Zy=  Ry(K1+K2)=
Ry(K1+K2)= 
 (K1+K2)=
(K1+K2)=  ·
·  (K1+K2)ωy.
(K1+K2)ωy.
Таким образом, в блоке 22 рассчитывается значение 
 , которое определяется по следующей формуле:
, которое определяется по следующей формуле: =
= 
Направление вращения ωy определяется знаком напряжения Uy, который в свою очередь определяется направлением действия гироскопических реакций Ry. Если вращение объекта с установленным на нем гироскопическим устройством происходит в плоскости XOZ против хода часовой стрелки, то возникающие гироскопические реакции имеют направление, как показано на фиг. 3. При вращении по ходу часовой стрелки направления в реакций Ry изменятся на противоположные и уже датчики 9 и 10 будут испытывать деформацию сжатия, а датчики 6 и 13 - деформацию растяжения. Так как входы 2 дифференциальных усилителей 14 и 16 являются инвертирующими входами, и на их входы 1 и 2 подаются сигналы различного знака, то на выходах дифференциальных усилителей 14 и 16 напряжения ΔU14 и Δ U16 имеют знак в зависимости от направления вращения объекта.
В формуле определения значения  коэффициент "4" является усредняющим, так как на выходе дифференциальных усилителей 14 и 16 значение напряжения ΔU14, ΔU16 пропорционально 2Ry, а на выходе сумматора 18 - 4Ry. Это объясняется тем, что гироскопическая реакция Ryпрактически измеряется четырьмя датчиками, т. е. датчиками 6, 9, 10, 13.
коэффициент "4" является усредняющим, так как на выходе дифференциальных усилителей 14 и 16 значение напряжения ΔU14, ΔU16 пропорционально 2Ry, а на выходе сумматора 18 - 4Ry. Это объясняется тем, что гироскопическая реакция Ryпрактически измеряется четырьмя датчиками, т. е. датчиками 6, 9, 10, 13.
При вращении объекта вместе с установленным на нем гироскопическим устройством в плоскости YOZ с угловой скоростью ωвх = ωx в гироскопическом устройстве 3 возникает гироскопический момент Муг, вектор которого направлен по оси OY, а так как угол между осями OZ и OX равен 90о, то значение гироскопического момента определяется как
Муг = Н ωx
Гироскопический момент Муг проявляется в виде гироскопических реакций Rx (см. фиг. 3), которые воспринимаются датчиками 7 и 8 в опоре 4 и датчиками 11 и 12 в опоре 5 (см. фиг. 1). Так как направления Rx в опорах 4 и 5 взаимно противоположны, и датчики 7 и 8, 11 и 12 включены по дифференциальной схеме, то, следовательно, датчик 8 опоры 4 и датчик 11 опоры 5 будут испытывать деформацию сжатия, а датчик 7 опоры 4 и датчик 12 опоры 5 - растяжение. Соответственно на выходах усилителей зарядов датчиков 8 и 11 появится напряжение
U8=  ;
;  U11=
U11=  , а датчиков 7 и 12 -
, а датчиков 7 и 12 -
U7= -  ;
;  U12= -
U12= -  .
.
Дальнейшая работа устройства по определению ωx аналогична его работе по определению ωy.
Таким образом, заявленный датчик угловой скорости позволяет более полно использовать инерционные (гироскопические) свойства гироскопа за счет изменения системы его подвеса, что приводит к возможности измерения двух составляющих абсолютной угловой скорости движения объекта одним гироскопическим устройством. (56) Назаров Б. И. Командно-измерительные приборы. М. МО СССР, 1987, с. 174.


Изобретение относится к точному приборостроению, в частности к измерению угловой скорости движения объекта с помощью гироскопических устройств. Цель изобретения - измерение угловой скорости объекта вокруг двух осей одним гироскопическим устройством. В устройстве гиромотор установлен в опоры, функцию которых выполняют восемь датчиков преобразования механических величин в электрические (датчиков силы), причем каждая опора состоит их четырех датчиков силы и относительно каждой координатной оси диаметрально противоположные датчики силы включены по дифференциальной схеме, а упругие элементы датчиков силы образуют систему подвеса гиромотора, ось подвеса которого расположена параллельно оси вращения ротора и в частном случае может совпадать с ней. 3 ил.
ДАТЧИК УГЛОВОЙ СКОРОСТИ, содержащий гиромотор с полуосями подвеса, установленный в корпусе на двух опорах подвеса, отличающийся тем, что, с целью обеспечения измерения угловой скорости относительно двух осей, в нем каждая опора подвеса выполнена в виде четырех датчиков силы с упругим элементом каждый, направление полуосей подвеса гиромотора параллельно оси вращения его ротора, дополнительно введены четыре дифференциальных усилителя, два сумматора, два аналого-цифровых преобразователя и блок вычисления составляющих угловой скорости, при этом выходы соосных датчиков силы каждой опоры попарно соединены с входами соответствующих дифференциальных усилителей, выходы дифференциальных усилителей сигналов соосных и параллельных датчиков силы одной и другой опоры попарно соединены с входами соответствующих сумматоров, выходы которых через соответствующие аналого-цифровые преобразователи соединены с входом блока вычисления составляющих угловой скорости.
