Изобретение относится к точному приборостроению, в частности к измерению угловых параметров движения летательного объекта с помощью гироскопических устройств.
Известен способ измерения угловых параметров движения объекта, в котором гироскопический момент двухстепенного гироскопа уравновешивается моментом сил вязкого трения и измеряется угол поворота гироскопа вокруг выходной оси по отношению к основанию, который затем дифференцируется.
Недостаток указанного способа и устройства заключается в том, что при вращении основания одновременно вокруг входной и выходной оси с датчика угла снимается сигнал, который пропорционален интегралу проекции абсолютной угловой скорости на входную ось и интегралу проекции углового ускорения на входную ось. Следовательно, вращение основания вокруг выходной оси вносит погрешность в выходной сигнал датчика угла. Это объясняется тем, что датчик угла измеряет не абсолютный угол поворота гироскопа вокруг выходной оси, а относительный угол между гироскопом и основанием, что приводит к снижению точности определения проекции абсолютной угловой скорости относительно одной оси.
Цель изобретения состоит в повышении точности измерения угловых параметров движения объекта.
Цель достигается тем, что в способе измерения угловых параметров движения объекта гироскопический момент двухстепенного гироскопа уравновешивают моментом сил вязкого трения и наряду с измерением угла поворота гироскопа вокруг выходной оси по отношению к основанию и дифференцированием сигнала об угле поворота гироскопического измерителя измеряют гироскопическую реакцию в опорах измерителя, суммируют сигналы, пропорциональные гироскопическим реакциям, нормируют и преобразуют просуммированный сигнал в цифровой эквивалент, вычисляют проекцию абсолютной угловой скорости на входную ось и проекцию углового ускорения на выходную ось измерителя по формуле.
Этот способ реализуется устройством, содержащим двухстепенный гироскоп, на входной оси которого установлен ротор датчика угла, статор которого жестко связан с корпусом. В гироскоп введены два датчика гироскопической реакции, каждый из которых установлен в пространстве между подшипником опоры гироузла и корпусом измерителя, дифференциальный и дифференцирующий усилители, два нормирующих усилителя, два аналого-цифровых преобразователя и блок управления и вычисления угловой скорости и ускорения. Выходы первого и второго датчиков гироскопической реакции подключены соответственно к первому и второму входам дифференциального усилителя, выход которого подключен к аналоговому входу первого аналого-цифрового преобразователя, цифровой параллельный выход которого подключен к входному порту блока управления и вычисления угловой скорости и углового ускорения. Выход датчика угла подключен к входу дифференцирующего усилителя, выход которого соединен с входом второго нормирующего усилителя, выход которого соединен с аналоговым входом второго аналого-цифрового преобразователя. Первый, второй и третий выводы выходного порта блока управления и вычисления угловой скорости и углового ускорения подключены соответственно к запускающему, сбросовому и синхронизирующему управляющим входам первого и второго аналого-цифровых преобразователей, выход второго аналого-цифрового преобразователя подключен к входному порту блока управления и вычисления угловой скорости и углового ускорения. Датчик гироскопической реакции является тензорезисторным датчиком силы, который представляет собой упругий элемент в виде кольца, на внутренней поверхности которого с диаметрально противоположных сторон наклеены тензорезисторы, включенные по дифференциальной схеме. Выход блока управления и вычисления угловой скорости и углового ускорения является выходом устройства.
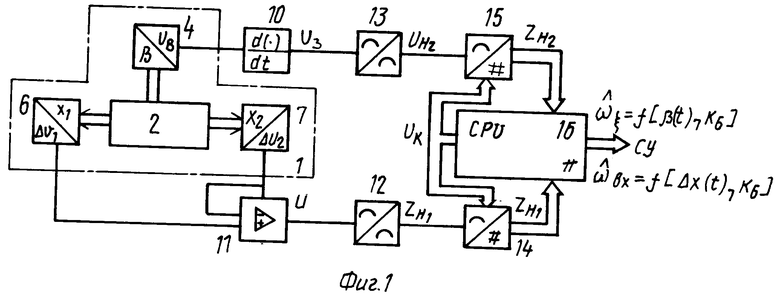
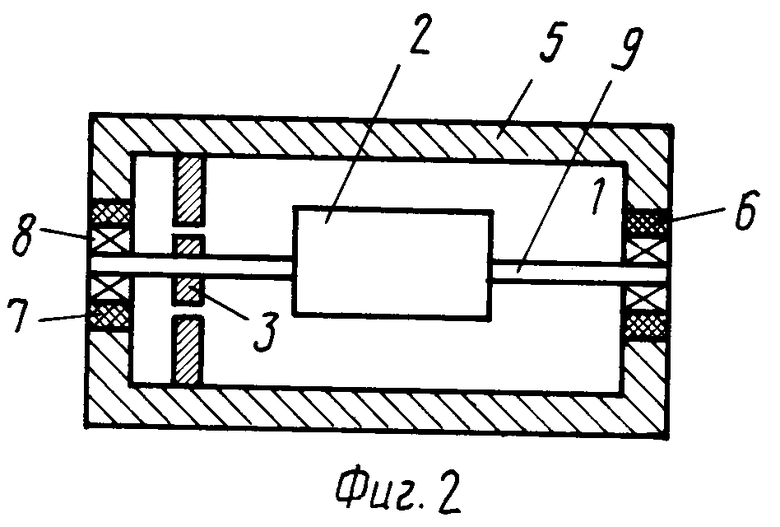
На фиг.1 и 2 изображено предлагаемое устройство.
Устройство содержит двухстепенный поплавковый гироскоп 1, на выходной оси которого установлен ротор 3 датчика угла 4, статор которого жестко связан с корпусом 5 гироскопа 1, первый 6 и второй 7 датчики гироскопической реакции, каждый из которых установлен в пространстве между подшипником 8 опоры 9 гироузла 2 и корпусом 5 измерителя, дифференцирующий 10 и дифференциальный 11 усилители, нормирующие усилители 12 и 13, аналого-цифровые преобразователи 14 и 15, блок 16 управления и вычисления угловой скорости и углового ускорения. Выход первого 6 и второго 7 датчиков гироскопической реакции подключены соответственно к первому и второму входам дифференциального 11 усилителя, выход которого соединен с входом нормирующего усилителя 12, выход которого подключен к аналоговому входу аналого-цифрового преобразователя 14, цифровой параллельный выход которого подключен к входному порту блока 16. Выход датчика угла 4 подключен к входу дифференцирующего усилителя 10, выход которого соединен с входом ноpмирующего усилителя 13, выход которого соединен с аналоговым входом аналого-цифрового преобразователя 15, цифровой параллельный выход которого соединен с входным портом блока 16, причем выходные выводы выходного порта блока 16 подключен к аналогово-цифровым преобразователям.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ | 1993 |
|
RU2046349C1 |
| ЦИФРОВОЙ ГРАВИМЕТР | 1994 |
|
RU2095829C1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| УСТРОЙСТВО ТЕРМОКОМПЕНСАЦИИ КВАРЦЕВОГО ГЕНЕРАТОРА | 1990 |
|
RU2007839C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006378C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАССЫ РЫЧАЖНЫМИ ВЕСАМИ | 1991 |
|
RU2017078C1 |
| Трехфазный стабилизатор переменного синусоидального напряжения дискретного действия | 1988 |
|
SU1576884A2 |
| Трехфазный стабилизатор переменного синусоидального напряжения дискретного действия | 1986 |
|
SU1330616A1 |
| РЕЛЕЙНО-ТРАНЗИСТОРНЫЙ КОММУТАТОР | 1990 |
|
RU2007857C1 |
Изобретение относится к точному машиностроению, а именно к гидроскопии. Целью изобретения является повышение точности измерения угловых параметров движения объекта, для чего дополнительно в гироскопе измеряют реакции в опорах от гидроскопического момента и в совокупности с измеренными углами поворота гироскопа относительно его выходной оси определяют угловую скорость и угловое ускорение. 2 с.п. ф-лы, 2 ил.
