Изобретение относится к геоэлектроразведке и может быть использовано при исследовании геологической среды методами переходных процессов (МПП), становления поля в ближней зоне (ЗСБ) и вызванной поляризации (ВП) в условиях импульсных, периодических и высокочастотных помех, а также может найти применение при измерении периодически повторяющегося сигнала, изменяющегося в большом динамическом диапазоне на фоне различного рода помех.
Для получения достоверных данных об исследуемом геофизическом объекте необходима высокая точность измерений электроразведочного сигнала переходного процесса, изменяющегося в большом динамическом диапазоне на фоне различного рода помех как импульсного, так и флуктуационного характера.
Известен способ геоэлектроразведки, реализованный в устройстве [1] для геофизической разведки методом переходных процессов с подавлением помех, описанном в патенте США N 4247821. Способ заключается в том, что исследуемую среду возбуждают серией импульсов электромагнитного поля и после окончания каждого импульса производят цикл измерений сигнала переходного процесса ЭДС, наведенной в приемном датчике, при этом сигнал переходного процесса усиливают с выбранным масштабом и интегрируют на интервалах длительностью 350 мкс с промежутками 50 мкс, на время которых результаты интегрирования измеряют в цифровой форме. На ранних временах переходного процесса результат измерения относят по времени к середине соответствующего интервала интегрирования. На более поздних временах определяют среднее значение двух соседних результатов измерения и относят по времени к середине суммарного интервала интегрирования, затем определяют среднее из четырех результатов и т. д. Таким образом в одном цикле измерения выполняется комбинированное (аналоговое и цифровое) усреднение сигнала и помех. Те же действия производят с множеством последующих сигналов переходного процесса, после чего хранящиеся в памяти цифровые значения сигналов, соответствующие одним и тем же фиксированным временам, усредняют за заданное число циклов измерения и по полученным результатам судят о свойствах исследуемой среды.
В способе также предусмотрено подавление импульсных атмосферных помех путем замены результата, пораженного импульсной помехой, на предыдущий результат и подавление промышленных сетевых помех типа 50 Гц, за счет того, что период зондирующих импульсов тока синхронизирован по фазе с периодом промышленных помех так, чтобы выключение токовых импульсов происходило в моменты времени, сдвинутые на 180о относительно периода промышленных помех, т. е. в противофазе.
Устройство для геофизической разведки по вышеописанному способу содержит передающую петлю, передающее устройство, тpиггерную схему управления передающим устройством и фильтр сетевой частоты, схему обнаружения атмосферных помех, монитор, приемную петлю, предусилитель, фильтр низких частот и схему аналого-цифрового преобразования, объединенную общей шиной с микропроцессором, интерфейсом и контроллером принтера, соединенным с принтером. Схема аналого-цифрового преобразования включает в себя масштабирующий усилитель, интегратор, схему выборки, аналого-цифровой преобразователь, память и схему усреднения. Заданный диапазон измерения обеспечивается путем усиления измеряемого сигнала с последовательно увеличивающимися коэффициентами усиления до тех пор, пока усиленный сигнал не достигнет заданного уровня. Благодаря этому сигналы, поступающие на интегратор с различных каскадов усиления, имеют примерно одинаковый уровень, несмотря на то, что входной сигнал масштабирующего усилителя изменяется в большом диапазоне. Выходной сигнал аналого-цифрового преобразователя умножается на соответствующий масштаб усиления.
В данном техническом решении комплексное использование аналогового интегрирования с цифровым усреднением результатов интегрирования способствует подавлению высокочастотных и случайных помех с нормальным распределением. Однако потенциально возможное при аналоговом интегрировании подавление промышленных помех 50 Гц при этом не достигается, так как длительность интервалов интегрирования постоянна (350 мкс), а на интервалах выборки, длительность которых превышает 400 мкс, результаты интегрирования усредняются в цифровом виде. Использование цифрового усреднения результатов измерений сигнала переходного процесса на фоне промышленных помех 50 Гц, характеризующихся большими амплитудными значениями, приводит к большей погрешности измерения, чем, например, в случае использования аналогового интегрирования на временном интервале, равном или кратном периоду Тппромышленных помех.
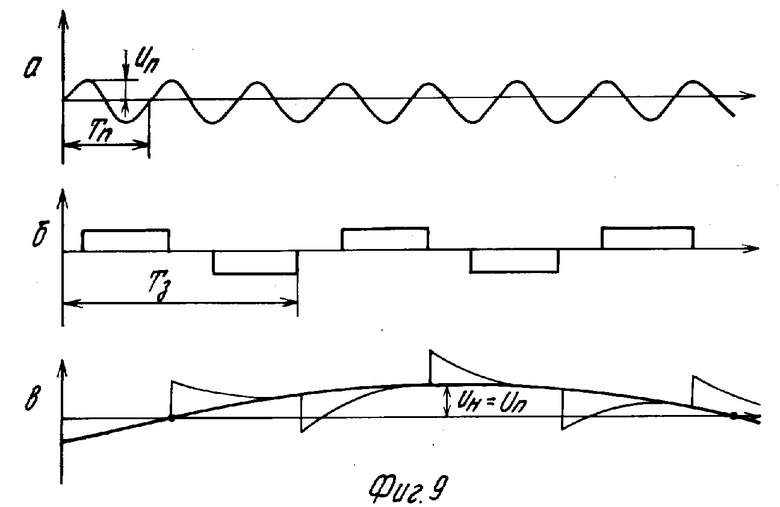
Кроме того, при фазовой синхронизации зондирующего сигнала с периодом Тз и сигнала промышленной помехи с периодом Тп могут возникать обусловленные нестабильностью промышленной сети биения между частотой зондирующего сигнала и частотой промышленной помехи. Результатом этих биений является низкочастотный сигнал Uн(t)= Uп·sin(2Π/Tп-Tз)·t, вид которого приведен на фиг. 9в. Период этого сигнала определяется разностью периодов промышленной помехи (фиг. 9а) и зондирующих импульсов (фиг. 9б), а амплитуда сигнала Uн(t) определяется амплитудой Uп промышленной помехи. Описанный способ не предусматривает подавление такого сигнала низкочастотной помехи.
Еще один недостаток данного технического решения заключается в том, что масштабирование измеряемого сигнала производится перед интегpированием и поступившая во время интегpирования помеха может "перегрузить" интегратор, что приводит к увеличению погрешности измерений.
Существенным недостатком технического решения является то, что точность измерений ограничена точностью аналого-цифрового преобразования, т. е. разрядностью АЦП (в данном случае 12 разрядов).
Известен также способ геоэлектроразведки, реализованный в многоканальной станции вызванной поляризации МСВП-8, описанной в [2] . Способ заключается в том, что геологическую среду возбуждают серией из m разнополярных импульсов электромагнитного поля и после каждого импульса производят в дискретные моменты времени цикл измерений сигнала-отклика исследуемой среды, при этом перед каждым циклом измерений формируют аналоговый сигнал, эквивалентный предварительно измеренному значению естественного поля, вычитают его из входного сигнала и интегpируют разностный сигнал на заданном временном интервале, результат интегрирования усиливают одновременно в нескольких масштабах и наибольший из результатов усиления, не превышающий допустимого значения, преобразуют в цифровую форму, по результатам m измерений, относящимся к одним и тем же моментам времени, определяют усредненные значения сигнала-отклика, по которым судят о свойствах исследуемой среды.
Устройство, реализующее способ, содержит входной коммутатор, блок согласования, входной усилитель, блок интегрирования, выборки и хранения, блок нормирующих усилителей, блок компараторов, логический нормализатор сигналов, измерительный ЦАП, информационное ОЗУ, цифровое табло, систему управления и синхронизации, блок управления генератором, генератор поляризующего тока и автоматический компенсатор поляризации (АКП), включающий в себя ОЗУ АКП и ЦАП АКП.
В данном способе не предусмотрено подавление промышленных помех 50 Гц. Выбор масштаба измерения после операции интегрирования хотя и способствует уменьшению влияния помех, поступивших во время интегрирования, однако в этом случае интегратор должен работать в большом динамическом диапазоне. Реализация такого интегратора связана со значительными техническими трудностями.
В этом способе, как и в предыдущем, точность измерений ограничена точностью аналого-цифрового преобразователя и составляет 12 разрядов.
Устройство, реализующее этот способ, обладает всеми недостатками, присущими выше описанному способу, и не имеет потенциальной возможности реализовать предлагаемый способ, поскольку оно не содержит вычислителя текущего среднего значения и в ОЗУ АКП записываются не результаты вычисления текущего среднего значения, а измеренные значения естественного поля.
Наиболее близким к предлагаемому является выбранный в качестве прототипа способ геоэлектроразведки, реализованный в аппаратуре "Цикл-3", описанной в [3] . Способ заключается в том, что определяют период Тп промышленных помех и возбуждают исследуемую среду серий из m зондирующих импульсов электромагнитного поля, период Тз которых синхронизирован с периодом Тп промышленных помех, после каждого зондирующего импульса производят в дискретные моменты времени цикл измерений, при этом перед каждым измерением в цикле из сигнала переходного процесса вычитают сформированный перед этим циклом аналоговый эквивалент значения смещения нулевого уровня усиления, интегрируют разностный сигнал и результат интегрирования преобразуют в цифровую форму. Длительность tинт интервалов интегрирования от измерения к измерению увеличивается в соответствии с выражением tинт= 2(i-1)·tнач/10 до максимального значения tmax = α˙Тп, где α - целое число. Полученные в цифровой форме результаты интегрирования на интервалах, длительность которых меньше tmax, относят к серединам соответствующих интервалов, а результаты интегрирования на интервалах, длительность которых равна tmax, усредняют в цифровой форме, относя усредненное значение к середине интервала выборки, включающего в себя несколько интервалов интегрирования. Результаты, относящиеся к одинаковым временам в m циклах измерения, разбивают на группы (2n-1), где n = 1, 2, 3, . . . , из каждой группы выбирают медианное значение, находят среднее арифметическое медианных значений, по которым и судят о геоэлектрических свойствах исследуемой среды.
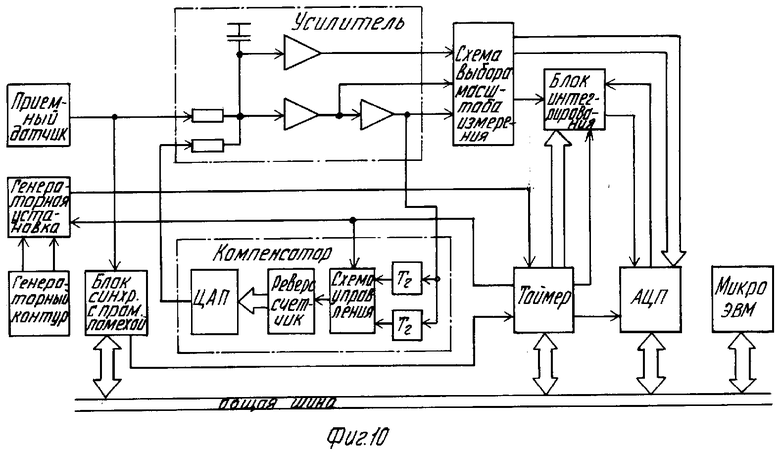
Способ-прототип реализуется с помощью устройства, которое содержит генераторную петлю, подключенную к генераторной установке, и приемный датчик, соединенный с одним из двух входов усилителя, второй вход которого соединен с выходом компенсатора, схему выбора масштаба измерения, блок интегрирования и аналого-цифровой преобразователь (АЦП), связанный общей шиной с микроЭВМ, таймером и блоком синхронизации с промышленной помехой, информационный вход которого соединен с выходом приемного датчика, а выход соединен с синхровходом таймера. При этом выход "Начало цикла" генераторной установки соединен с пусковым входом таймера, а управляющий вход генераторной установки соединен с выходом "Ток" таймера. Выход "Метки времени" таймера соединен с входом запуска АЦП, а выходы таймера "Интервал интегрирования" и "Код постоянной времени" соединены соответственно с первым и вторым управляющими входами блока интегрирования. Информационный вход АЦП соединен с выходом блока интегрирования, а масштабирующий вход АЦП соединен с выходом "Код масштаба" схемы выбора масштаба измерения, аналоговый выход которой соединен с информационным входом блока интегрирования, а входы схемы выбора масштаба соединены с выходами соответствующих усилительных каскадов усилителя. Вход "Сброс" блока интегрирования соединен с выходом "Конец кодирования" АЦП. Информационный вход компенсатора соединен с одним из выходов усилителя, а управляющий вход - с выходом таймера "Ток".
Функциональная схема устройства-прототипа, составленная в соответствии с его техническим описанием, приведена на фиг. 10.
В способе-прототипе эффективность подавления помех повышается за счет гибкого использования аналогового и цифрового усреднения, поскольку длительность интервалов интегрирования изменяется в зависимости от времени измерения переходного процесса. Однако, поскольку масштабирование измеряемого сигнала производится перед интегрированием, то помеха, поступившая во время интегрирования, может "перегрузить" интегратор.
С повышением помехозащищенности задача повышения точности измерений становится еще более актуальной. А способ-прототип сохраняет существенный недостаток аналогов, заключающийся в том, что точность измерений ограничена точностью аналого-цифрового преобразования, составляющей 12 разрядов. Использование же известных способов [4] повышения точности аналого-цифрового преобразования не приемлемо в сочетании с аналоговым интегрированием измеряемого сигнала, необходимым для подавления высокочастотных помех.
Вышеописанное устройство обладает недостатками способа-прототипа и не может реализовать предлагаемый способ, так как оно не позволяет формировать компенсирующий сигнал в виде аналогового эквивалента среднего значения результатов предыдущих измерений (текущего среднего значения), поскольку информационный вход компенсатора связан с одним из выходов усилителя, но не связан с микроЭВМ, где текущее среднее значение может быть вычислено.
Целью изобретения является повышение точности измерений сигнала переходного процесса на фоне различного рода помех.
Цель достигается тем, что в известном способе геоэлектроразведки, при котором возбуждают исследуемую среду серией зондирующих импульсов электромагнитного поля, период Тз которых синхронизируют с периодом Тп промышленной помехи, после каждого j-го зондирующего импульса производят в дискретные моменты времени j-й цикл измерений сигнала переходного процесса, перед каждым i-м измерением в цикле из входного сигнала вычитают аналоговый компенсационный сигнал, предварительно сформированный в соответствии с заданным значением, интегрируют разностный сигнал на заданном временном интервале и результат интегрирования преобразуют в цифровую форму, получая значение разностного сигнала, результаты измерений, отнесенные к одним и тем же временам, усредняют и по полученным значениям судят о свойствах исследуемой среды, согласно изобретения, компенсационный сигнал формируют перед каждым i-м измерением j-го цикла в виде аналогового эквивалента значения, которое определяют как среднее результатов i-х измерений в l предшествующих j-му циклах, где 1≅ l ≅ (j-1), а интегрирование производят одновременно с q последовательно увеличивающимися коэффициентами передачи и преобразуют в цифровую форму наибольший из допустимых результатов интегрирования, при этом определяют значения низкочастотной помехи и результат каждого i-го измерения определяют как сумму соответствующих i-му временному интервалу значений компенсационного сигнала, значений разностного сигнала и значений сигнала низкочастотной помехи, обусловленной биениями частот зондирующих импульсов и промышленной помехи, причем значение Uнi сигнала низкочастотной помехи может быть определено из выражения
Uнi= Uп·sin(2Π/ Tп-Tз)·ti, где Uп - амплитуда промышленной помехи;
π = 3,14;
ti - время измерения;
Тп - период промышленной помехи;
Тз - период зондирующих импульсов.
Для этого в известное устройство, содержащее генераторную петлю, соединенную с генераторной установкой, приемный датчик, соединенный с первым входом усилителя, второй вход которого соединен с выходом компенсатора, схему выбора масштаба измерения, блок интегрирования, а также микроЭВМ, связанную общей шиной с аналого-цифровым преобразователем (АЦП), таймером и блоком синхронизации с промышленной помехой, информационный вход которого соединен с выходом приемного датчика, при этом управляющий вход генераторной установки соединен с выходом "Ток" таймера, выход "Метки времени" таймера соединен с входом запуска АЦП, а выходы таймера "Интервал интегрирования" и "Код постоянной времени" соединены соответственно с первым и вторым управляющими входами блока интегрирования, вход "Сброс" которого соединен с выходом "Конец кодирования" АЦП, выход "Код масштаба" схемы выбора масштаба измерения соединен с масштабирующим входом АЦП, согласно изобретению, дополнительно введены q блоков интегрирования, отличающихся друг от друга значениями коэффициента передачи, вход запуска компенсатора соединен с выходом "Метки времени" таймера, а информационный вход компенсатора через общую шину связан с микроЭВМ, при этом первые управляющие входы блоков интегрирования, как и вторые управляющие входы, а также входы "Сброс" объединены между собой, информационные входы блоков интегрирования объединены и подключены к выходу усилителя, а выходы блоков интегрирования через схему выбора масштаба измерения связаны с информационным входом АЦП.
Новым по отношению к прототипу является принцип компенсации измеряемого сигнала аналоговым эквивалентом текущего среднего значения периодически повторяющегося сигнала переходного процесса. Такой принцип компенсации реализуется благодаря новым связям компенсатора - его вход запуска соединен с выходом "Метки времени" таймера, а его информационный вход связан через общую шину с микроЭВМ. Новым является и то, что скомпенсированный (разностный) сигнал интегрируют одновременно с несколькими различными коэффициентами передачи и аналого-цифрового преобразованию подвергают оптимальный (наибольший из допустимых) результат интегрирования, что становится возможным благодаря введению дополнительных блоков интегрирования.
Сущность изобретения заключается в том, что благодаря использованию в качестве компенсирующего сигнала аналогового эквивалента текущего среднего значения, получаемого с помощью накопления результатов измерений за предыдущее число реализаций сигнала переходного процесса, интегрированию подвергается разностный, близкий к полю, сигнал, что позволяет интегрировать этот сигнал с максимально допустимым коэффициентом передачи, тем самым уменьшить вес кванта аналого-цифрового преобразования увеличить число разрядов кода измеряемого сигнала, а следовательно, повысить точность измерений сигнала переходного процесса на фоне высокочастотных и периодических помех. Предлагаемый принцип компенсации обеспечивает к тому же возможность учета в аналоговой форме низкочастотной помехи, обусловленной биениями частот зондирующего сигнала и промышленной помехи.
Заявителю известны способы повышения точности аналого-цифрового преобразования, использующие сходный признак - принцип компенсации измеряемого сигнала, например, способ двухкратного аналого-цифрового преобразования [4] , при котором во время первого преобразования образуют компенсирующее напряжение Uк с оценкой его значения в старших разрядах отсчетного устройства, во время второго преобразования оценивают разностный сигнал (Uх - Uк) с занесением его значения в младшие разряды отсчетного устройства, а результат одного измерения определяют как сумму значений, занесенных в старшие и младшие разряды отсчетного устройства. Использование двукратного преобразования при измерении сигнала переходного процесса на фоне различного рода помех без применения интегрирования приведет к тому, что с большой точностью будет измерен входной сигнал, представляющий собой сумму полезного сигнала и помех, в частности высокочастотных. Интегрирование измеряемого сигнала является наиболее эффективным способом подавления высокочастотных помех. Но если производить интегрирование перед двукратным аналого-цифровым преобразованием, то интегратор должен в этом случае обеспечивать большой динамический диапазон (более 212 - 214), что при существующей элементной базе технически не реализуемо. При использовании интегрирования после первого преобразования к интегратору не предъявляется высоких требований, поскольку его динамический диапазон определяется здесь динамическим диапазоном второго преобразования. Однако в этом случае уменьшается точность второго преобразования, что обусловлено быстрым изменением измеряемого сигнала. Влияние характера изменения измеряемого сигнала на точность второго преобразования поясняется фиг. 8. Первое преобразование U'АЦП кончается в момент времени N. Результат интегрирования на временном интервале NM разницы входного сигнала и аналогового эквивалента результата первого преобразования представляет собой довольно большую величину. В методе переходных процессов, например, входной сигнал аппроксимируется функцией вида 1/t2÷ 1/t4, при этом величина результата интегрирования U''АЦП может составлять около 30% от значения компенсационного напряжения. Поэтому результат второго преобразования нельзя отнести к младшим разрядам кода. Следовательно, второе преобразование дает не более двух двоичных разрядов в дополнение к результату первого преобразования.
В предлагаемом техническом решении известный признак - принцип компенсации измеряемого сигнала - используется в новой совокупности с интегрированием, масштабированием и накоплением (арифметическим суммированием) результатов измерений предыдущих реализаций сигнала переходного процесса. В качестве компенсирующей величины здесь при каждом измерении используется не результат первого преобразования этого же самого измерения, как в способе двукратного преобразования, а аналоговый эквивалент суммы результатов измерений предыдущих реализаций измеряемого сигнала. То есть значение компенсирующего напряжения в точке N равно не UN, как при двукратном преобразовании, а значению UL, которое представляет собой среднее текущее значение периодически повторяющегося измеряемого сигнала, полученное путем арифметического суммирования результатов предыдущих измерений, проводимых с использованием интегрирования. Предлагаемая совокупность признаков в отличие от способа двукратного аналого-цифрового преобразования позволяет добиться повышения точности аналого-цифрового преобразования при измерении сигнала переходного процесса на фоне высокочастотных и периодических помех путем уменьшения значения единицы младшего разряда АЦП за счет того, что аналого-цифровому преобразованию подвергается оптимальный (наибольший допустимый) результат интегрирования разностного (скомпенсированного) сигнала, близкого к нолю. Следовательно, предлагаемое техническое решение соответствует критерию "существенные отличия".
На фиг. 1 приведена структурная схема заявляемого устройства; на фиг. 2 - схема компенсатора; на фиг. 3 - схема блока интегрирования; на фиг. 4 - схема выбора масштаба измерения; на фиг. 5 - схема аналого-цифрового преобразователя; на фиг. 6 - схема таймера; на фиг. 7 - временные диаграммы работы устройства; на фиг. 8 - принцип компенсации измеряемого сигнала, использованный в предлагаемом способе; на фиг. 9 - изображение сигнала низкочастотной помехи, обусловленной биениями частот промышленной помехи и зондирующих импульсов; на фиг. 10 - функциональная схема устройства-прототипа.
Устройство для геоэлектроразведки (фиг. 1) содержит генераторный контур 1, соединенный с генераторной установкой 2. Приемный датчик 3 соединен с первым входом усилителя 4 и блоком 5 синхронизации с промышленной помехой. Второй вход усилителя 4 соединен с выходом компенсатора 6. Блоки 7 интегрирования объединенными информационными входами подключены к выходу усилителя 4, а выходы блоков 7 через схему 8 выбора масштаба измерения подключены к информационному входу АЦП 9, связанного общей шиной с микроЭВМ 10, таймером 11, компенсатором 6 и блоком 5 синхронизации с промышленной помехой. Управляющий вход генераторной установки 2 соединен с выходом "Ток" таймера 11, выход "Метки времени" таймера 11 соединен с объединенными входами запуска АЦП 9 и компенсатора 6, выход таймера 11 "Интервал интегрирования" соединен с объединенными первыми управляющими входами блоков 7 интегрирования, выход таймера 11 "Код постоянной времени" соединен с объединенными вторыми управляющими входами блоков 7 интегрирования, а выход АЦП 9 "Конец кодирования" соединен с объединенными входами "Сброс" блоков 7.
Генераторная установка 2 содержит не показанные на чертежах источник тока, тиристорный коммутатор, выполненный по триггерно-мостовой схеме [5] , и блок управления.
В качестве приемного датчика 3 может быть использована проволочная петля, выполненная из геофизического провода ГПСПП, или магнетометр.
Усилитель 4 представляет собой разностный дифференциальный усилитель, выполненный, например, на микросхеме К140 УД14.
Блок 5 синхронизации с помехой содержит не показанные на фигурах последовательно соединенные низкочастотный фильтр, усилитель-ограничитель, фазовый детектор, цифровой интегратор, генератор, управляемый напряжением, и цифровой фильтр.
Компенсатор 6 (фиг. 2) содержит последовательно соединенные схему 12 интерфейса, регистр 13 данных, цифроаналоговый преобразователь (ЦАП) 14, усилительный каскад 15, выход которого соединен с входом обратной связи ЦАП 14 и является выходом компенсатора 6. Входом запуска компенсатора 6 является вход управления ЦАП 14. Схема 12 интерфейса и регистр 13 данных связаны через общую шину с микроЭВМ 10. Регистр 13 данных может быть выполнен, например, на микросхеме К561 ИР12, ЦАП14 - на микросхеме К572 ПА2А, а усилительный каскад 15 - на микросхеме К140 УД6. Схема 12 интерфейса может, например, быть выполнена на микросхеме К588 ВТ1.
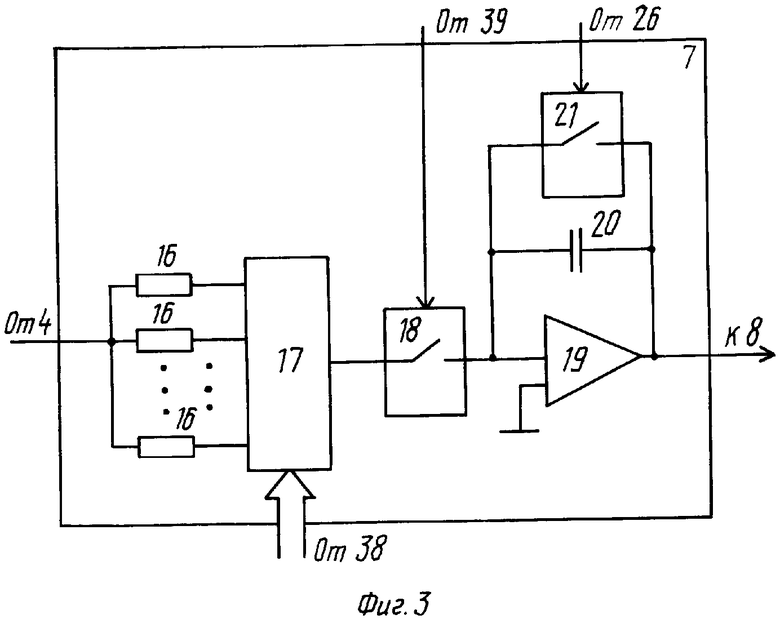
Блок 7 интегрирования (фиг. 3) содержит резисторы 16, первые выводы которых объединены и являются информационным входом блока 7, а вторые выводы подключены к аналоговому мультиплексору 17. Выход последнего через ключ 18 соединен с интегрирующим усилителем 19, зашунтированным включенными параллельно конденсатором 20 и ключом 21. Выход усилителя 19 является выходом блока 7. Управляющий вход ключа 18 является первым управляющим входом блока 7, управляющий вход мультиплексора 17 является вторым управляющим входом блока 7, а управляющий вход ключа 21 является входом "Сброс" блока 7 интегрирования. Номиналы всех резисторов 16 различны и выбираются из условия сохранения постоянства коэффициента К передачи блока 7 интегрирования при изменении длительности tинт интервала интегрирования: K= τ/tинт= const , где τ = RC - постоянная времени; R - сопротивление одного из резисторов 16; С - емкость конденсатора 20. Каждый из q блоков 7 интегрирования имеет свой постоянный коэффициент передачи, при этом K1< K2 <. . . < Kq. В данном случае q = 4, К1 = 2, К2 = 8, К3 = 64, К4 = 512. Мультиплексор 17 может быть выполнен, например, на микросхеме К590КН6, интегрирующий усилитель 19 - на микросхеме К140УД18, а ключи 18, 21 - на микросхеме К590КН5.
Схема 8 выбора масштаба измерения (фиг. 4) содержит аналоговый мультиплексор 22, каждый из q входов которого объединен с входом соответствующего порогового устройства 23, соединенного с декодером 24. Информационные входы мультиплексора 22 являются входами схемы 8, а выход мультиплексора 22 - аналоговым выходом схемы 8. Выход декодера 24 соединен с управляющим входом мультиплексора 22 и является выходом "Код масштаба" схемы 8. Мультиплексор 22 может быть выполнен, например на микросхеме К590КН6. Пороговое устройство 23 может, например, представлять собой компаратор, выполненный на микросхеме К597СА3. Декодер 24 выполнен, например, на микросхеме К561ЛП2.
АЦП 9 (фиг. 5) содержит преобразователь 25 аналог-код (ПАК), стробирующий вход которого соединен с установочным входом триггера 26, являющимся входом запуска АЦП 9, регистр 27 данных и схему 28 интерфейса. Аналоговый вход ПАК 25 является информационным входом АЦП 9. Выход "Конец преобразования" ПАК 25 соединен с объединенными входами сброса триггера 26 и регистра 27 данных, а информационный выход ПАК 25 соединен с первым информационным входом регистра 27, второй информационный вход которого является масштабирующим входом АЦП 9. Выход триггера 26 является выходом "Конец кодирования" АЦП 9. Регистр 27 и схема 28 интерфейса соединены с общей шиной. ПАК 25 может быть выполнен по схеме поразрядного уравновешивания на микросхеме К1108ПА1, регистр 27 - на микросхеме К155ИР17, триггер 26 - на микросхеме К561ТМ2. Схема 28 интерфейса - К588ВТ1.
МикроЭВМ 10 содержит не показанные на чертежах объединенные общей шиной оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), процессор (ПРЦ), пульт управления и регистратор. В качестве микроЭВМ 10 может быть использована как одна из серийно-выпускаемых микроЭВМ, например типа ДВК2, ДВК3, так и специально разработанные ПРЦ на микросхемах серии К588, ПЗУ на микросхемах серии К573 РФ4 с ультрафиолетовым стиранием информации, ОЗУ на микросхемах К537РУ10, регистратор на основе микросхем К537РУ10, пульт управления с клавиатурой и жидкокристаллическим дисплеем ИЖВ-71-96х8 на 16 знакомест.
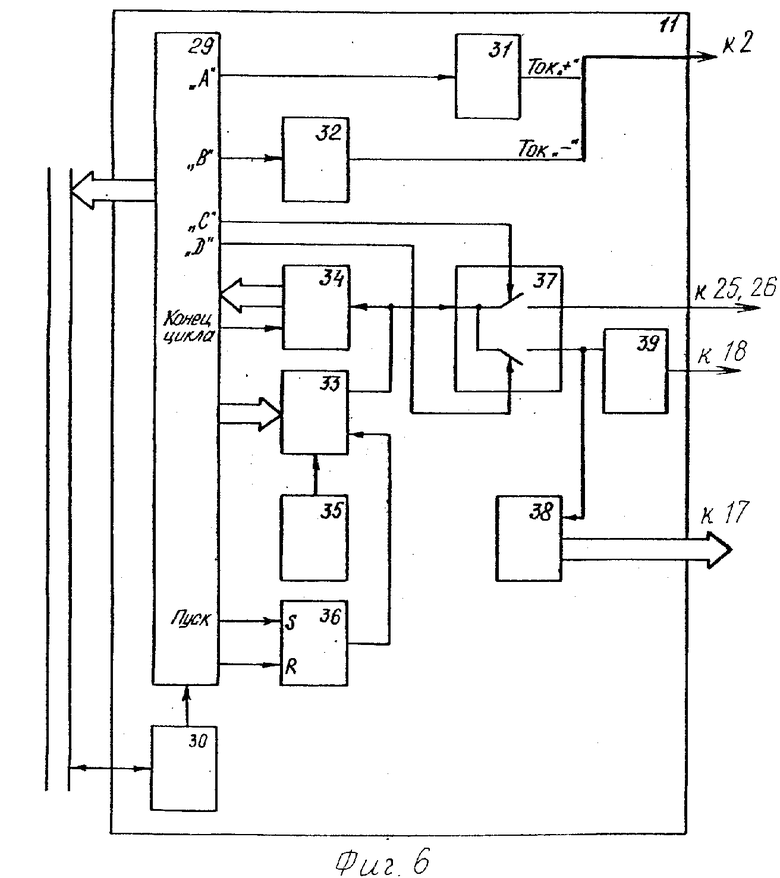
Таймер 11 (фиг. 6) содержит регистр 29 данных, схему 30 интерфейса, формирователи 31 и 32 импульсов, счетчик 33 временных интервалов, счетчик 34 адреса, задающий генератор 35, триггер 36, мультиплексор 37, двоичный счетчик 38 и одновибратор 39. Регистр 29 и схема 30 интерфейса соединены с общей шиной. Выходы А, В, С, D регистра 29 являются выходами "Код признака временного интервала" и соединены соответственно с входами формирователя 31, формирователя 32, первым и вторым управляющими входами мультиплексора 37. Выход "Код временного интервала" регистра 29 соединен с информационным входом счетчика 33 временных интервалов, тактовый вход которого связан с задающим генератором 35, а выход соединен с объединенными информационными входами мультиплексора 37 и счетчика 34 адреса. Выход последнего соединен с адресным входом регистра 29. Выход "Конец цикла" регистра 29 соединен с установочным входом счетчика 34 адреса. Выходы "Пуск" и "Конец измерений" регистра 29 соединены соответственно с установочным и сбросовым входами триггера 36, выход которого соединен со стробирующим входом счетчика 33 временных интервалов. Выход формирователя 31 является выходом сигнала "Ток+", а выход формирователя 32 - выходом сигнала "Ток -". Оба эти выхода подключены к шине, являющейся выходом "Ток" таймера 11. Первый выход мультиплексора 37 является выходом "Метки времени" таймера 11, а второй выход соединен с объединенными входами одновибратора 39 и двоичного счетчика 38, выход которого является выходом "Код постоянной времени" таймера 11. Выход одновибратора 39 является выходом "Интервал интегрирования" таймера 11. Регистр 29 данных представляет собой оперативное запоминающее устройство, выполненное, например, на микросхеме К537РУ10. Схема 30 интерфейса выполнена на микросхеме К588ВТ1. Формирователи 31, 32 выполнены, например, на микросхеме К561АГ1, счетчик 33 временных интервалов - на микросхеме К561ИЕ15, счетчик 34 адреса - на микросхеме К561ИЕ10, задающий генератор 35 - на микросхеме К561ЛН2, триггер 36 - на микросхеме К561ТМ2, мультиплексор 37 - на микросхеме К561КП2, двоичный счетчик 38 - на микросхеме К561ИЕ10, а одновибратор 39 - на микросхеме К561АГ1.
Способ осуществляется следующим образом.
В зависимости от решаемой геофизической задачи и от используемой методики исследований устанавливают форму, длительность t3период Т3 следования зондирующих импульсов, число m циклов измерения (число зондирующих импульсов), начальное tнач и конечное tкон времена измерения.
Не возбуждая зондирующих импульсов, измеряют амплитудное значение Uп и период Тп промышленной помехи. В зависимости от величины Uп способ имеет две модификации.
Первая модификация способа используется, когда амплитуда промышленной помехи превышает допустимый заданный уровень и ее влияние необходимо учитывать. В этом случае выполняют следующие операции:
- рассчитывают для каждого времени ti шкалы измерения сигнал переходного процесса значения Uнi низкочастотной помехи, обусловленной биениями частот зондирующего сигнала и промышленной помехи по формуле Uнi= Uн·sin(2Π/Tз-Tп)·ti (1);
- определяют длительность tсинхр временной задержки включения зондирующих импульсов из условия фазовой синхронизации промышленной помехи и зондирующих импульсов n˙Тп = tсинхр + t3 + tизм (2), где n - целое число;
- возбуждают m зондирующих импульсов тока, синхронизируя по фазе с промышленной помехой путем задержки включения тока на время tсинхр;
- принимают сигналы переходного процесса;
- после каждого j-го зондирующего импульса производят в соответствии с заданной временной шкалой цикл измерений принимаемого сигнала переходного процесса;
- перед каждым i-м измерением в j-м цикле вычисляют соответствующее значение Uкi компенсационного сигнала как среднее значение результатов i-х измерений в l предшествующих j-му циклах, где l выбирается из условия 1≅l≅(j-1) в зависимости от методики исследований;
- формируют аналоговый эквивалент значения Uкi и вычитают его из сигнала переходного процесса на временном интервале tинт.i;
- интегрируют разностный (скомпенсированный) сигнал на временном интервале tинтi одновременно с q различными коэффициентами передачи, такими, что K1 < K2 < . . . < Kq;
- выбирают наибольший из допустимых результат интегрирования и преобразуют его в цифровую форму, получая значение разностного сигнала Δ Ui;
- определяют результат i-го измерения как сумму соответствующих интервалу tинт.i, взятых с учетом знака значений Uкi, Δ Ui, Uнi, относят его по времени к середине этого интервала;
- усредняют медианные значения результатов измерений, относящихся к одним и тем же временам, при этом основанием медианы выбирают нечетное число в пределах от 3 до 9, относят полученные значения к серединам соответствующих интервалов.
Вторая модификация способа используется в случае, когда амплитуда промышленной помехи не превышает допустимого заданного значения и ее влиянием можно пренебречь. В этом случае значения Uнi и tсинхр приравниваются к нулю, следовательно, отсутствует операция фазовой синхронизации зондирующих импульсов, а операция определения результатов измерения производится без учета значений Uнi в отличие от первой модификации способа.
Устройство, реализующее способ, работает в следующих режимах:
- запись параметров зондирования и измерения;
- измерение параметров промышленной помехи;
- зондирование;
- измерение сигнала переходного процесса.
Работа устройства координируется управляющей программой, записанной в ПЗУ микроЭВМ 10.
После включения питания с пульта управления микроЭВМ 10 задают вид зондирующих импульсов, их длительность t3 и период Т3, m - число накоплений, т. е. число циклов измерения сигнала переходного процесса, номер временного диапазона шкалы измерения, т. е. начальное время tнач и конечное время tкон измерения, а также число периодов и интервал измерения сигнала промышленной помехи. Временная шкала имеет 16 диапазонов в зависимости от величин tнач и tкон. Каждый диапазон образован группами по 8 временных интервалов интегрирования tинт.i. Длительность временных интервалов в группе неизменна, а от группы к группе увеличивается по закону tинт.i= 2i-1tнач/10 до 20 мс. Далее длительность остается постоянной вплоть до последнего времени измерения, составляющего 40 с.
По командам процессора коды и признаки заданных параметров загружаются в регистр 29 данных таймера 11 и устройство переходит к выполнению режима "Измерение параметров промышленной помехи". В этом режиме при отсутствии тока в генераторной петле 1 в приемном датчике 3 наводится ЭДС промышленной помехи, которая через предусилитель (на фигурах не показан) поступает в блок 5 синхронизации с промышленной помехой. Блок 5 синхронизации вырабатывает напряжение с частотой, равной частоте промышленной помехи с точностью до фазы, выделяет моменты времени (математическое ожидание), совпадающие с положениями одноименных максимумов периодической помехи, и измеряет равные периоду помехи временные интервалы между соседними положениями положительных максимумов периодической помехи. Измеренные значения периода помеха запоминаются в ОЗУ микроЭВМ 10. По окончании измерений заданного числа периодов помехи процессор вычисляет среднее значение Тп периода, которое запоминается в ОЗУ микроЭВМ 10. Одновременно с поступлением на вход блока 5 сигнал промышленной помехи подается через усилитель 4, работающий в режиме усиления без компенсации, и схему 8 выбора масштаба измерения на информационный вход АЦП 9. АЦП 9 преобразует входной сигнал в цифровую форму в соответствии с равномерной временной шкалой измерения, образованной постоянным интервалом измерения сигнала промышленной помехи и формируемой таймером 11. Процесс измерения значений промышленной помехи аналогичен первому циклу измерения сигнала переходного процесса, который рассмотрен подробнее далее. Измеренные значения периодической помехи запоминаются в ОЗУ микроЭВМ 10. По окончании заданного числа периодов промышленной помехи процессор выбирает наибольшее из значений, измеренных во время каждого полупериода, усредняет выбранные значения, получая значение Uп амплитуды промышленной помехи, и сравнивает его с допустимым заданным значением Uпдоп. В случае Uп ≅ Uпдоп. устройство переходит к режиму зондирования и в случае Uп > Uпдоп. процессор вычисляет по формуле (1) значение tсинхр временной задержки зондирующих импульсов и значения низкочастотной помехи Uнi по формуле (2). Код длительности и признак tсинхр. записываются в регистр 29 таймера 11, а значения Uнi в ОЗУ микроЭВМ 10, после чего устройство переходит в режим зондирования.
Режим зондирования начинается по сигналу "Пуск" (фиг. 7г, л), поступающему с пульта управления микроЭВМ 10, либо по каналу внешней синхронизации (на чертежах не показан) на установочный вход триггера 36, который разрешает по этому сигналу работу счетчика 33 времени. Счетчик 33 времени формирует в режиме зондирования временную задержку tсинхр и сигнал "Ток" для управления коммутатором тока генераторной установки 2, а в режиме измерения - временную шкалу в соответствии с заданным диапазоном измерения. Счетчик 33 времени при поступлении разрешающего сигнала (фиг. 7д, м) переписывает во внутренний регистр код длительности того временного интервала, признак которого записан в регистр 29 данных в соответствии с таблицей.
В случае Uп > Uпдоп. первым в режиме зондирования формируется интервал tсинхр (фиг. 7ж), а в случае Uп ≅ Uпдоп. - интервал t3(фиг. 7н). По окончании этого временного интервала счетчик 34 адреса инкрементирует адреса регистра 29 данных и на выходах АВСД регистра 29 устанавливается признак следующего временного интервала (t3), а на информационные входы счетчика 33 времени поступает код длительности этого интервала и формирователь 31 вырабатывает сигнал управления (в данном случае "Ток +") генераторной установкой 2 (фиг. 7з). Генераторная установка 2 формирует в генераторном контуре 1 мощный импульс тока. По концу интервала t3 ток в петле 1 выключается, а счетчик 34 адреса вновь инкрементирует адрес регистра 29 данных и счетчик 33 времени, начиная с момента времени tнач, последовательно формирует 40 интервалов интегрирования заданного диапазона временной шкалы. Устройство переходит к режиму измерения переходного процесса.
В режиме измерения переходного процесса на выходах АВСD регистра 29 по концу каждого интервала интегрирования устанавливается признак сигнала "Интервал интегрирования" (ИИ), а в два раза реже - признак сигнала "Метки времени" (МВ), которые управляют работой мультиплексора 37, формирующего сигналы ИИ (фиг. 7и) и МВ (фиг. 7к). После того, как будет сформирован последний интервал интегрирования в цикле, на вход сброса счетчика 34 адреса поступает сигнал "Конец цикла", записываемый процессором в регистр 29. Сигнал "Конец цикла" устанавливает счетчик 34 в исходное состояние. Триггер 36 сбрасывается после m циклов измерения по сигналу "Конец измерений", поступающему по команде процессора из регистра 29.
Перед измерениями сигнала переходного процесса измерительный тракт калибруется. Калибровка заключается в измерении коэффициентов передачи интеграторов 7, измерении смещения "нуля" интеграторов 7 и измерении весовых значений ЦАП 14 компенсатора 6. Калибровка осуществляется с помощью коммутатора калибровки (на фигурах не показан). Измерения коэффициентов передачи интеграторов 7 осуществляются путем подачи на вход усилителя 4 эталонного напряжения +2 В. Измерение смещения нуля интеграторов 7 осуществляется путем подключения входа усилителя 4 к общему проводу, земле.
Сигнал переходного процесса поступает с приемного датчика 3 на первый вход усилителя 4. В первом цикле измерения по командe процессора в регистр 13 компенсатора 6 записывается через схему 12 интерфейса нулевой код, который по сигналу МВ, поступающему на вход управления ЦАП 14, с таймера 11, преобразуется в аналоговый нулевой сигнал и через усилительный каскад 15 поступает на второй вход усилителя 4. В усилителе 4 происходит вычитание входных сигналов с учетом их знака. Разностный сигнал с выхода усилителя 4 поступает на входы блоков 7 интегрирования, интегрируется одновременно всеми блоками 7, каждый из которых имеет свой коэффициент передачи. Запуск блоков 7 производится по сигналу ИИ, поступающему на управляющий вход ключа 18 с таймера 11. Код масштаба постоянной времени интегрирования, учитывающий изменение длительности интервалов интегрирования в процессе измерения, поступает с выхода двоичного счетчика 38 на вход управления аналогового мультиплексора 17, который подключает к входу усилителя 19 соответствующий резистор 16. С помощью схемы 8 выбора масштаба измерения выбирается результат интегрирования того из блоков 7, значение напряжения которого ближе к значению +4 В (максимально допустимое напряжение аналого-цифрового преобразования). На это напряжение настроены пороговые устройства 23. Код масштаба измерения, формируемый в декодере 24, поступает в регистр 27 данных АЦП 9 и на управляющий вход мультикомпрессора 22, который подключает к информационному входу АЦП 9 выход соответствующего этому коду блока 7 интегрирования. По сигналу МВ, поступающему с таймера 11 на стробирующий вход ПАК 25, оптимальный результат интегрирования разностного сигнала преобразуется в код. По концу преобразования триггер 26 срабатывает, сигнал "Лог. 1" с его выхода поступает на управляющий вход ключа 21 и последний замыкается. При этом конденсатор 20 разряжается, интегрирующий усилитель 19 сбрасывается. Код результата интегрирования вместе с кодом масштаба измерения из регистра 27 переписывается в ОЗУ микроЭВМ 10. Измеренные значения разностного сигнала с учетом знака суммируются в микроЭВМ 10 с соответствующими значениями низкочастотной помехи. Полученные результаты хранятся в ОЗУ микроЭВМ 10.
Работа устройства во время второго цикла измерения аналогична его работе в первом цикле. Отличие заключается лишь в том, что во втором цикле перед каждым измерением по команде процессора в регистр 13 компенсатора 6 записывается не нулевой код, а код результата, полученного в этой же точке временной шкалы в первом цикле измерения. Компенсатор формирует аналоговый сигнал, пропорциональный записанному коду, который подается на второй вход усилителя 4, где вычитается из сигнала переходного процесса, поступающего на первый вход. На выходе усилителя 4 имеет место разностный скомпенсированный сигнал, который измеряется в цифровой форме вышеописанным образом. Каждое измеренное значение разностного сигнала суммируется в микроЭВМ 10 с соответствующими значениями компенсационного сигнала и низкочастотной помехи. Результат суммирования является результатом измерения сигнала переходного процесса и хранится в ОЗУ микроЭВМ 10.
В j-м цикле перед каждым i-м измерением микроЭВМ 10 вычисляет соответствующий код компенсационного сигнала как среднее значение результатов i-х измерений в l предшествующих j-му циклах. Величина l (глубина компенсации) может быть задана с пульта управления микроЭВМ 10, либо программно и выбирается из условия 1≅ l≅ (j-1) в зависимости от методики исследования.
После m циклов измерения результаты, относящиеся к одним и тем же временам, обрабатываются в микроЭВМ 10 с использованием медианных выборок, а медианные значения усредняются. Результат усреднения поступает в регистратор микроЭВМ 10.
По сравнению с прототипом предлагаемое техническое решение за счет компенсации сигнала переходного процесса аналоговым эквивалентом среднего значения результатов предшествующих измерений и интегрирования cкомпенсированного сигнала с наибольшим допустимым коэффициентом передачи позволяет увеличить в два раза число разрядов кода измеряемого сигнала без увеличения разрядности АЦП, тем самым повысив точность измерений. Точность измерений повышается также за счет того, что компенсационный сигнал формируется с учетом низкочастотной помехи, обусловленной биениями частот зондирующих импульсов и промышленной помехи. Кроме того, благодаря определению масштаба измерения по результатам интегрирования, а не до процесса интегрирования, исключается погрешность измерений, которая может возникнуть в прототипе, если пришедшая во время интегрирования помеха "перегрузит" интегратор. (56) 1. Патент США N 4247821
2. Бобровников Л. З. , Орлов Л. И. , Попов В. А. Полевая электроразведочная аппаратура. Справочник. М. : Недра, 1986, с. 80-86.
3. Техническое описание электроразведочной аппаратуры "Цикл-3". Юд3.036.044 ТО.
4. Шляндин В. М. Цифровые измерительные устройства. М. : Высшая школа, 1981, с. 313-319.
5. Новый тиристорный коммутатор тока для метода ЗСБ. Попов Е. Б. , Хаов Ф. М. Геофизические и геодезические методы и средства при поисках полезных ископаемых в Сибири, СНИИГГиМС, 1982, с. 46-50.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1414127A1 |
| Способ геоэлектроразведки и устройство для его осуществления | 1986 |
|
SU1423974A1 |
| СПОСОБ ТЕСТИРОВАНИЯ АППАРАТУРЫ ИМПУЛЬСНОЙ ЭЛЕКТРОРАЗВЕДКИ И СРЕДСТВ ОБРАБОТКИ И ИНТЕРПРЕТАЦИИ ИЗМЕРЕННЫХ ДАННЫХ | 1993 |
|
RU2073890C1 |
| Способ геоэлектроразведки | 1990 |
|
SU1770776A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1984 |
|
RU1233666C |
| УСТРОЙСТВО ДЛЯ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1998 |
|
RU2136021C1 |
| Генераторная установка электроразведочной станции | 1990 |
|
SU1728828A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2045083C1 |
| СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2189615C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1978 |
|
SU798666A1 |


Использование: в геоэлектроразведке для измерения сигналов, быстро изменяющихся в большом динамическом диапазоне на фоне промышленных и высокочастотных помех. Сущность изобретения: возбуждают в исследуемой среде электромагнитное поле, формируя в петле 1 генераторной установкой 2 серию импульсов тока. Период импульсов тока синхронизируют с периодом промышленной помехи с помощью блока 5 синхронизации. Принимают датчиком 3 сигналы переходного процесса и измеряют после каждого импульса тока в дискретные моменты времени. Перед каждым измерением вычисляют в микроЭВМ 10 среднее значение результатов предыдущих измерений на этом времени. В соответствии с вычисленным средним значением в компенсаторе 6 формируют аналоговый компенсационный сигнал. Вычисляют в разностном усилителе 4 компенсационный сигнал из входного сигнала. Интегрируют разностный сигнал на заданном временном интервале одновременно несколькими интеграторами 7, коэффициенты передачи которых различны. Определяют в схеме 8 выбора масштаба измерения наибольший из допустимых результат интегрирования и преобразуют его в АЦП 9 в цифровую форму. Результат каждого измерения вычисляют в микроЭВМ 10 как сумму значения компенсационного сигнала, соответствующего заданному временному интервалу, результата интегрирования разностного сигнала на этом временном интервале и значения низкочастотной помехи, соответствующего этому временному интервалу. 2 с. и 1 з. п. ф-лы, 10 ил.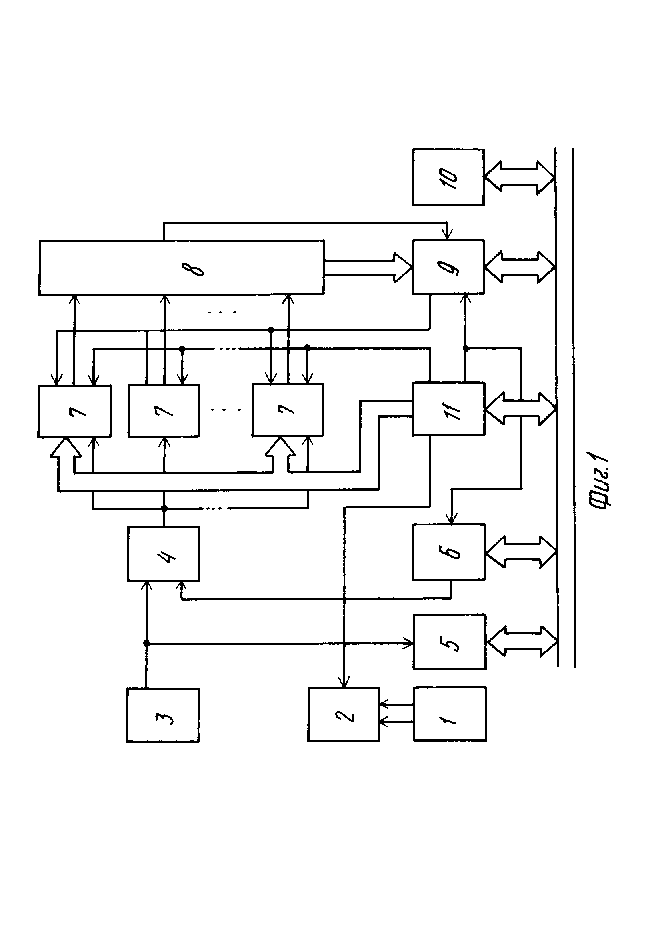
U = Uп×sin
= Uп×sin  ti
ti
где Uп - амплитуда промышленной помехи;
ti - время измерения.
